Bersagli Robot
Bersagli robot permettono di registrare posizione specifiche in modo che il robot possa muoversi in quella posizione. Per aggiungere un nuovo bersaglio e vedere le informazioni collegate:
●Seleziona Programma➔
Ciò registrerà la posizione attuale del robot utilizzando il piano di riferimento attivo

●Clicca con il tasto destro, poi seleziona Più Opzioni... (F3) per vedere la posa registrata e i valori giunti
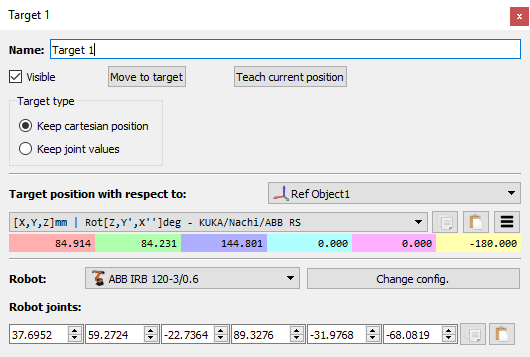
Creare un nuovo bersaglio registra il TCP con rispetto del piano di riferimento nello spazio Cartesiano e come assi robot. Di default, RoboDK crea bersagli come bersagli Cartesiani (Mantieni posizione cartesiane
Dall'altra parte, è possibile specificare il bersaglio nello spazio giunti (Mantieni valore giunti 
È buona pratica utilizzare bersagli giunti per raggiungere la posizione di approcio vicino all'area di lavoro, poi bersagli cartesiani per assicurarsi che il tracciato non venga alterato se il piano di riferimento o il piano del tool vengono modificati.
È possibile vedere altre configurazioni per raggiungere la stessa posa con il robot. Più informazioni nella prossima sezione.