Configurazioni Robot
Una configurazione robot definisce uno stato specifico del robot. Modificare la configurazione richiede attraversare una singolarità. I controllori robot non possono attraversare singolarità durante un movimento lineare (un movimento giunti è necessario). In altre parole, per compiere un movimento lineare tra due tracciati la configurazione robot deve essere la stessa per completare il movimento, incluso il primo e l'ultimo punto.
Clicca con il tasto destro un robot e seleziona Cambia configurazione per aprire la finestra della configurazione robot. È anche possibile aprire la finestra selezionando Più opzioni nel pannello robot.
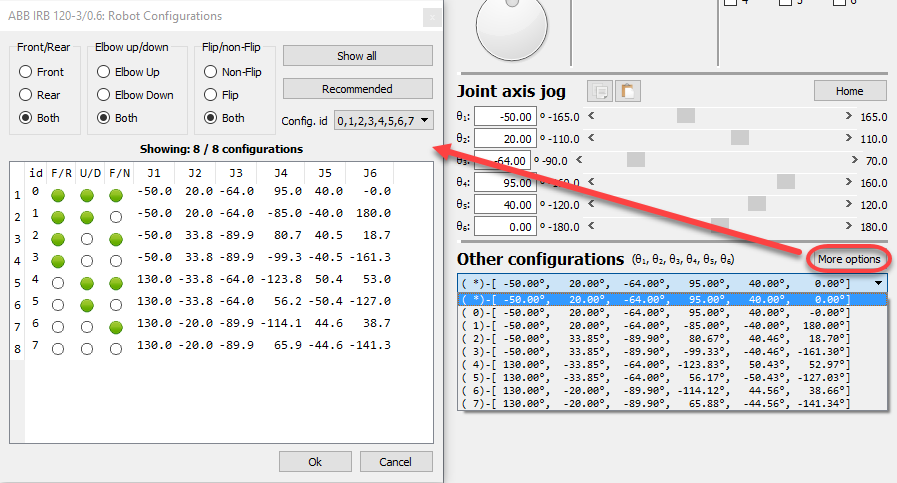
Per un robot standard a 6 assi ci sono solitamente 8 configurazioni per ogni posizione del robot assumento che ogni asse possa muoversi di un giro completo. In pratica, limiti giunti possono essere più o meno restrittivi dipendentemente dal robot. Quindi, potrebbe esser possibile avere da 1 a 100 configurazioni di robot differenti per una specifica locazione, dipendentemente dal robot.
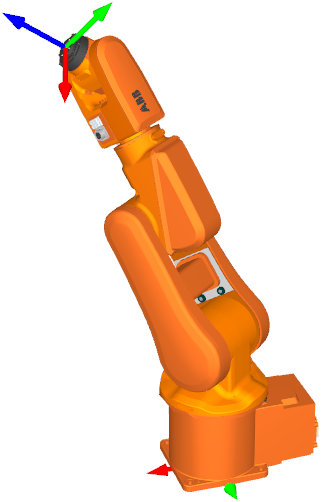
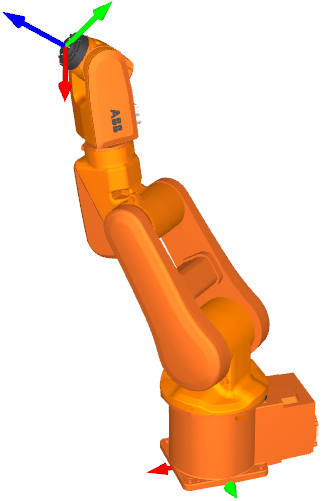
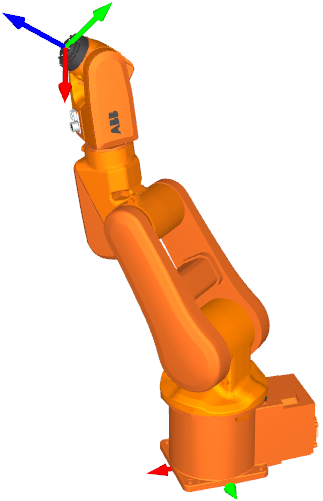
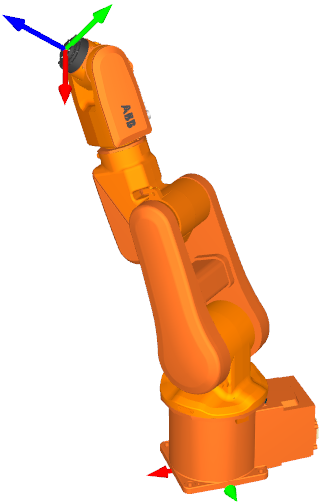
Una configurazione robot definisce uno specifico modo (assembly mode) di raggiungere una posizione con il robot. Per esempio, un robot può avere il gomito all'insù o all'ingiù (Up vs. Down, o U/D) allo stesso tempo può guardare il bersaglio o può avere la base ruotata di 180 gradi per raggiungere il bersagli al rovescio (Rear vs. Front, o F/R). Infine, il giunto 5 può invertirsi nel momento in cui l'asse 4 e 6 compensano per il movimento (Flip vs. Non-Flip, o F/N). In totale, ciò fornisce 2*2*2=8 configurazioni.