Il menù principale contiene tutte le opzioni disponibili. Il menu principale è diviso nelle seguenti sezioni:
1.Menu File: Permette di importare nuovi file (geometrie 3D, robot, tool, tracciati, ...) e aprire o salvare progetti RoboDK (estensione RDK).
2.Menu Modifica: Permette di tagliare/copiare/incollare un oggetto o un gruppo di oggetti e annullare/ripetere azioni.
3.Menu Programma: Permette di creare o modificare programmi robot e altre opzioni collegate alla programmazione Offline (OLP)
4.Menu Visualizza: Fornisce azioni utili per navigare in 3D e impostare viste specifiche.
5.Menu Strumenti: Fornisce strumenti generali come controllo collisioni, misurazioni punti, o aprire il menu opzioni.
6.Menu Utilità: Permette l'esecuzione di operazioni specifiche come utilizzare il robot per operazioni di manifattura, calibrare il TCP o un piano di riferimento, utilizzare il robot come stampante 3D o una macchina CNC a 5 assi, calibrare un robot... Queste operazioni potrebbero richedere una licenza specifica.
7.Menu Connessione: Permette la connessione al robot, un sistema di misurazione o simulare camera.
8.Menu Aiuto: Permette di aprire la documentazione online (F1), controllare aggiornamenti o impostare una licenza.
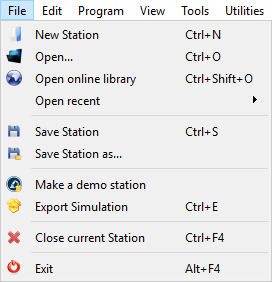
Menu File
È possibile Aprire, Salvare o esportare documenti dal menu File.
Nuova Stazione aggiungerà una nuova stazione all'albero. Una stazione può essere caricata o salvata come file RDK. Il file RDK (estensione RDK) contiene tutte le informazioni riguardo ai robot e agli oggetti in modo che non sia richiesto tenere una copia degli oggetti importati.
Suggerimento: È possibile avere più di una Stazione aperta allo stesso tempo. Fare doppio click sulla stazione visualizzerà la stazione.
Apri caricherà una nuovo file RoboDK (Stazione RDK) o importare ogni altro file riconosciuto, come .robot per file robot, STEP/IGES/STL per oggetti, .tool per file tool, etc.
Apri libreria online mostrerà una nuova finestra con la libreria online.
Salva Stazione salverà il file RDK. SelezionaSalva Stazione come... per fornire il percorso del file.
Crea una demo esporterà la stazione come file EXE con una versione semplificata di RoboDK.
Esporta Simulazione esporterà uno specifico programma o simulazione come file 3D PDF o 3D HTML. Esempio
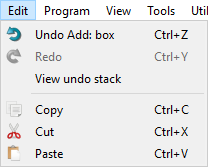
Menu Modifica
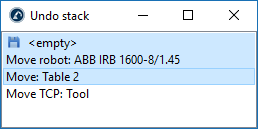
Annulla (Ctrl+Z) and Ripeti (Ctrl+Y) sono accessibili dal menù modifica. È anche disponibile l'elenco annulla che permette di revertire cambiamenti in avanti o indietro, ad uno specifico stato selezionando l'azione.
È anche possibile tagliare (Ctrl+X), copiare (Ctrl+C) o incollare (Ctrl+V) un oggetto od un gruppo di oggetti dall'albero della stazione. Se un oggetto è copiato, tutti gli oggetti collegati sono anch'essi copiati.
Suggerimento: È possibile raggruppare azioni simili in una sola. Per esempio, se il robot è mosso manualmente, ogni passo viene registrato (di default). Per raggruppare azioni simili in un unico step selezionare: Strumenti➔Opzioni➔selezionare Ragguppa assieme azioni simili.
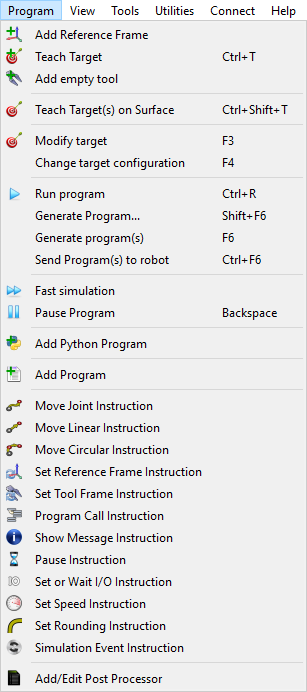
Menu Programma
Il menu programma contiene tutte le componenti collegate alla Programmazione Online (OLP) e alla generazione del programma. È possibile aggiungere nuovi programmi, piani di riferimento, bersagli o tool ai robot. Queste componenti della Programmazione Offline (piani di riferimento, tool, bersagli, ecc..) appariranno su tutti i programmi generati offline.
Aggiungi Piano di Riferimento aggiungerà un nuovo piano di riferimento collegato alla radice della stazione o collegato ad un altro piano di riferimento se il piano di riferimento è selezionato.
Aggiungi un tool vuoto aggiungerà un nuovo TCP al robot. Non è richiesta alcuna geometria per aggiungere un nuovo tool. Tool multipli permettono di referenziare parti diverse della stessa geometria collegato al tool.
Insegna Bersaglio (Ctrl+T) aggiungerà un nuovo bersaglio al piano di riferimento attivo per il tool robot attivo. Il piano di riferimento attivo può essere selezionato nel pannello robot. È anche possibile fare click col tasto destro su un piano di riferimento o un tool per renderlo attivo.
Insegna Bersaglio su Superficie (Ctrl+Shift+T) permetterà all'utente di selezionare punti di un oggetto per creare facilmente dei bersagli. Un esempio è disponibile in questa sezione.
Aggiungi programma aggiungerà un nuovo programma che può essere creato utilizzando l'interfaccia grafica (GUI) di RoboDK. Nessuna esperienza di programmazione è richesta per creare o modificare questo tipo di programmi robot. Il programma robot può essere simulato e generato per un robot specifico, automaticamente e facilmente.
La sezione Istruzioni Programma del documento di Programmazione Offilene fornisce più informazioni riguardo alle istruzioni programma disponibili dalla GUI.
Aggiungi un Programma Python includerà un semplice progrmma/macro/script/modulo Python nella stazione connessa all'API di RoboDK. Un programma Python che utilizza l'API di RoboDK permette di creare programmi robot da un codice di programmazione generico (Python). È possibile rendere disponibili questi programmi per qualunque controller robot. È anche possibile simulare azioni specifiche per estendere la GUI dei programmi. Queste azioni possono essere sottoprogrammi robot per la programmazione offline, online, o semplicemente simulare specifici eventi come rendere visibili oggetti automaticamente in punti a caso per una simulazione di pick and place. Un programma Python è come un file di testo incorporato nella stazione e contiene il codice Python in grado di automatizzare compiti specifici in RoboDK. L'API RoboDK è disponibile in Python di default ma altri linguaggi di programmazione possono essere utilizzati per interfacciarsi con RoboDK.
Nota: La differenza tra un normale programma (utilizzando Aggiungi Programma) generato utilizzando l'interfaccia grafica e un programma Python (utilizzando Aggiungi Programma Python) è che la prima non richiede alcuna esperienza di programmazione. Dall'altra parte, una macro Python che utilizza l'API di RoboDK permette di estendere i limiti di un programma generato utilizzando l'interfaccia grafica.
Infine, è possibile Aggiungere o Modificare un Post Processor. I post processor definiscono come i programmi sono generati per uno specifico controller robot, permettendo di ospitare sintassi specifiche del produttore. I Post Processor sono le componenti finali del processo di Programmazione Offline.
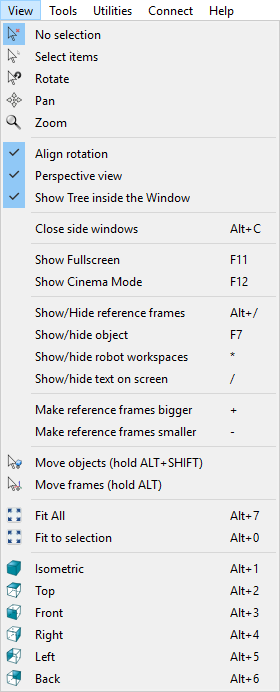
Menu Visualizza
Gran parte delle opzioni richieste per navigare in 3D sono disponibili nel menu Visualizza. È possibile Ruotare, Traslare e Ingrandire la vista da questo menu (come anche cliccando con il tasto destro sulla vista 3D). Ciò è utile per navigare in 3D utilizzando un touchpad (invece che un mouse)
Per permettere una rotazione libera in tutte le direzioni deseleziona l'opzione: Visualizza➔Allinea rotazion. Diversamente, RoboDK bloccherà il riferimento della stazione per mantenere il piano XY orizzontale.
È possibile mostrare o nascondere lo spazio di lavoro del robot selezionando il tasto asterisco (*). È anche possibile cambiare da oggetti visibili ad invisibili selezionando il tasto F7.
Suggerimento: È possibile ingrandire o rimpicciolire i piani di riferimento premendo + o - più volte. Se un gran numero di oggetti sono visibili è utile modificare le dimensioni dei piani di riferimento per trascinarli propriamente se necessitano di essere mossi dalla vista 3D (tenendo premuto il tasto ALT ad esempio)
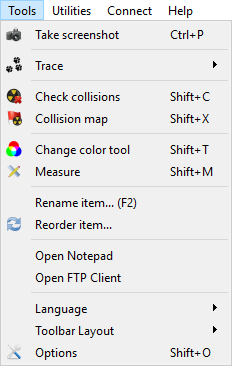
Menu Strumenti
Strumenti generici sono disponibili nel menu Strumenti, ad esempio scattare istantanee della vista 3D, attivare la traccia del robot, attivare il controllo collisione o misurare le coordinate di un punto.
Attivare la Tracciao visualizzerà la traccia di tutti i robot nel momento in cui si muovono.
Il Controllo collisioni attiverà o disattiverà il controllo collisioni. Quando il controllo collisioni è attivo, oggetti in stato di collisione verranno visualizzati in rosso. La Mappa Collisioni permette di specificare quali interazioni fra gli oggetti sono controllate.
Nota: Più informazioni disponibili riguardo al controllo collisioni nella sezione Collisioni.
Cambia colore tool visualizzerà una piccola finestra che permette di cambiare il colore dei robot e degli oggetti. È anche possibile invertire i vettori normali alla superficie.
Misura visualizzerà una finestra che permette di misurare i punti in 3D con rispetto di un piano di riferimento o del piano di riferimento della stazione (misurazione assoluta)
È anche possibile specificare la lingua dell'applicazione RoboDK selezionando Strumenti➔Lingua e selezionando la lingua preferita. RoboDK mostrerà la lingua selezionata immediatamente.
Layout Toolbar permette di impostare la toolbar di default. In alternativa è possibile specificare una toolbar per un uso base o avanzato.
Seleziona Opzioni per aprire il menù opzioni. Più informazioni disponibili nella sezione Menu Opzioni.
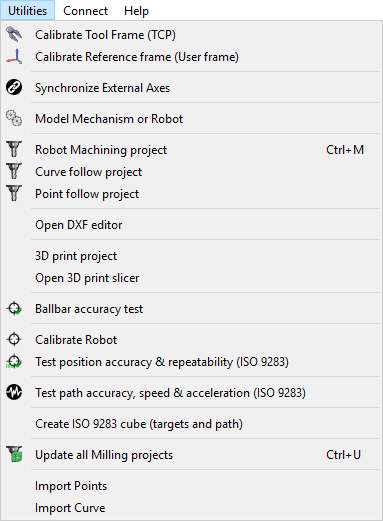
Menu Utilità
Il menu utilità permette di eseguire comandi specifici:
Calibra Piano di Riferimento Tool (TCP) permette di calibrare un TCP fornendo dati da un setup vero, ad esempio la configurazione giunti per raggiungere un punto da differenti orientamenti. Questa procedura è solitamente disponibile in tutti i tech pendant. RoboDK permette di calibrare un TCP con quante configurazioni lo si desidera. Utilizzando più configurazioni si ha un valore del TCP più accurato. Più informazioni riguardo alla calibrazione TCP.
Calibra Piano di Riferimento permette di identificare un piano di riferimento con rispetto del piano della base del robot. Ciò permette di far corrispondere la parte del setup reale con quella dell'ambiente virtuale. Più informazioni sulla Calibrazione dei Piani di Riferimento.
Sincronizza Assi Esterni permette di impostare uno o più assi esterni ed un robot come un meccanismo robot. Più informazioni disponibili nella sezione Assi Esterni.
Progetto di fresatura può facilmente convertire percorsi CNC in programmi robot. RoboDK può importare programmi fatti per CNC a 5 assi utilizzando software CAM. come file generici G-code o file APT. Questi programmi/percorsi possono esser facilmente simulati e convertiti in programmi robot con RoboDK. Più informazioni disponibili in questa sezione.
Il Progetto segui curva è come un progetto fresatura ma permette di selezionare curve estratte da una geometria 3D come percorsi. È anche possibile selezionare Importa Curva per importare curve 3D come file CSV o TXT. Queste curve devono essere fornite come una lista di punti XYZ e, opzionalmente, vettori IJK. Più informazioni disponibili nella sezione progetto segui curva
Il Progetto segui punto è come un progetto fresatura ma permette di selezionare punti estratti da una geometria 3D e creare facilmente percorsi robot. È anche possibile selezionare Importa Punti per importare punti 3D da file CVS o TXT. Questi punti devono essere forniti come lista di punti XYZ e, opzionalmente, vettori IJK. Più informazioni disponibili nella sezione progetto segui punti
Seleziona Progetto stampa 3D per generare un programma di stampa 3D robotizzata per uno specifico oggetto. L'oggetto deve essere disponibile nella stazione RoboDK. Il percorso di stampa 3D è convertito in G-code dietro le quinte utilizzando uno Slicer e poi trattato come un percorso di fresatura a 3 assi. Più informazioni disponibili nella sezione stampa 3D robotizzata
Il test di Accuratezza con Ballbar permette di controllare la performance del robot utilizzando uno strumento telescopico a doppia ballbar. Più informazioni disponibili qui: https://robodk.com/ballbar-test
Calibra Robot permette di impostare un progetto di calibrazione robot per migliorarne l'accuratezza e trovare parametri di errore robot. Un robot calibrato può essere usato in ogni progetto di Programmazione Offline di RoboDK. La calibrazione robot solitamente migliora l'accuratezza di 5 volte o più, dipendentemente dal modello del robot. La calibrazione robot richiede strumenti di misurazione. Più informazioni disponibili qui: https://robodk.com/robot-calibration
Nota: Alcuni di questi strumenti potrebbero richiedere una specifica licenza che estende la licenza di default.
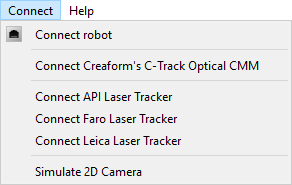
Menu Connetti
È possibile connettersi ad un robot ed immettere i parametri di connessione, come l'IP e nome utente e password FTP. Impostare una connesione al robot permette di trasferire programmi tramite FTP o far partire programmi direttamente dal PC per certi robot tramite i driver supportati in RoboDK. Nuovi driver robot posson essere sviluppati dall'utente finale, più informazioni disponibili nella sezione driver robot.
È anche possibile connettersi ad un sistema di misurazione supportato, come un laser tracker o Creaform Optical CMM. Ciò permette di automatizzare la calibrazione robot ed eseguire test.
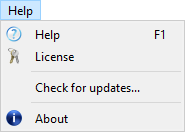
Menu Aiuto
Aiuto (F1) apre questa documentazione online. Una versione PDF della documentazione è disponibile per il download in cima ad ogni sezione. Quando premi F1, RoboDK visualizza l'argomento collegato all'oggetto selezionato.
Seleziona Controlla aggiornamenti... per controllare se un aggiornamento è disponibile. Un messaggio comparirà con un aggiornamento raccomandato o notificando solamente che la versione in uso è già aggiornata. Se nessun messaggio compare, significa che un firewall sta bloccando la comunicazione ad internet di RoboDK.