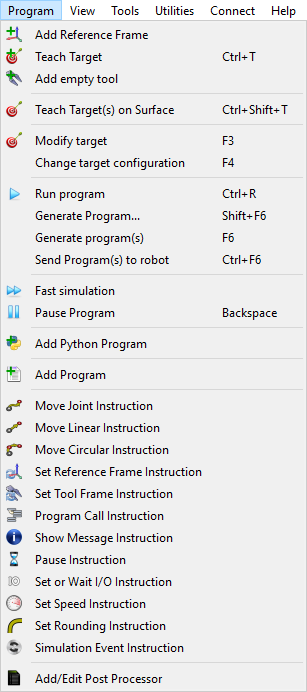
Il menu programma contiene tutte le componenti collegate alla Programmazione Online (OLP) e alla generazione del programma. È possibile aggiungere nuovi programmi, piani di riferimento, bersagli o tool ai robot. Queste componenti della Programmazione Offline (piani di riferimento, tool, bersagli, ecc..) appariranno su tutti i programmi generati offline.
Aggiungi Piano di Riferimento aggiungerà un nuovo piano di riferimento collegato alla radice della stazione o collegato ad un altro piano di riferimento se il piano di riferimento è selezionato.
Aggiungi un tool vuoto aggiungerà un nuovo TCP al robot. Non è richiesta alcuna geometria per aggiungere un nuovo tool. Tool multipli permettono di referenziare parti diverse della stessa geometria collegato al tool.
Insegna Bersaglio (Ctrl+T) aggiungerà un nuovo bersaglio al piano di riferimento attivo per il tool robot attivo. Il piano di riferimento attivo può essere selezionato nel pannello robot. È anche possibile fare click col tasto destro su un piano di riferimento o un tool per renderlo attivo.
Insegna Bersaglio su Superficie (Ctrl+Shift+T) permetterà all'utente di selezionare punti di un oggetto per creare facilmente dei bersagli. Un esempio è disponibile in questa sezione.
Aggiungi programma aggiungerà un nuovo programma che può essere creato utilizzando l'interfaccia grafica (GUI) di RoboDK. Nessuna esperienza di programmazione è richesta per creare o modificare questo tipo di programmi robot. Il programma robot può essere simulato e generato per un robot specifico, automaticamente e facilmente.
La sezione Istruzioni Programma del documento di Programmazione Offilene fornisce più informazioni riguardo alle istruzioni programma disponibili dalla GUI.
Aggiungi un Programma Python includerà un semplice progrmma/macro/script/modulo Python nella stazione connessa all'API di RoboDK. Un programma Python che utilizza l'API di RoboDK permette di creare programmi robot da un codice di programmazione generico (Python). È possibile rendere disponibili questi programmi per qualunque controller robot. È anche possibile simulare azioni specifiche per estendere la GUI dei programmi. Queste azioni possono essere sottoprogrammi robot per la programmazione offline, online, o semplicemente simulare specifici eventi come rendere visibili oggetti automaticamente in punti a caso per una simulazione di pick and place. Un programma Python è come un file di testo incorporato nella stazione e contiene il codice Python in grado di automatizzare compiti specifici in RoboDK. L'API RoboDK è disponibile in Python di default ma altri linguaggi di programmazione possono essere utilizzati per interfacciarsi con RoboDK.
Nota: La differenza tra un normale programma (utilizzando Aggiungi Programma) generato utilizzando l'interfaccia grafica e un programma Python (utilizzando Aggiungi Programma Python) è che la prima non richiede alcuna esperienza di programmazione. Dall'altra parte, una macro Python che utilizza l'API di RoboDK permette di estendere i limiti di un programma generato utilizzando l'interfaccia grafica.
Infine, è possibile Aggiungere o Modificare un Post Processor. I post processor definiscono come i programmi sono generati per uno specifico controller robot, permettendo di ospitare sintassi specifiche del produttore. I Post Processor sono le componenti finali del processo di Programmazione Offline.