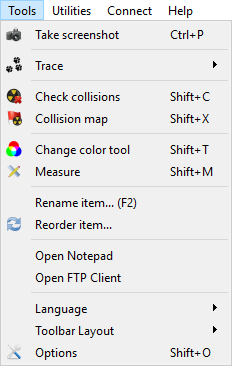
Strumenti generici sono disponibili nel menu Strumenti, ad esempio scattare istantanee della vista 3D, attivare la traccia del robot, attivare il controllo collisione o misurare le coordinate di un punto.
Attivare la Tracciao visualizzerà la traccia di tutti i robot nel momento in cui si muovono.
Il Controllo collisioni attiverà o disattiverà il controllo collisioni. Quando il controllo collisioni è attivo, oggetti in stato di collisione verranno visualizzati in rosso. La Mappa Collisioni permette di specificare quali interazioni fra gli oggetti sono controllate.
Nota: Più informazioni disponibili riguardo al controllo collisioni nella sezione Collisioni.
Cambia colore tool visualizzerà una piccola finestra che permette di cambiare il colore dei robot e degli oggetti. È anche possibile invertire i vettori normali alla superficie.
Misura visualizzerà una finestra che permette di misurare i punti in 3D con rispetto di un piano di riferimento o del piano di riferimento della stazione (misurazione assoluta)
È anche possibile specificare la lingua dell'applicazione RoboDK selezionando Strumenti➔Lingua e selezionando la lingua preferita. RoboDK mostrerà la lingua selezionata immediatamente.
Layout Toolbar permette di impostare la toolbar di default. In alternativa è possibile specificare una toolbar per un uso base o avanzato.
Seleziona Opzioni per aprire il menù opzioni. Più informazioni disponibili nella sezione Menu Opzioni.