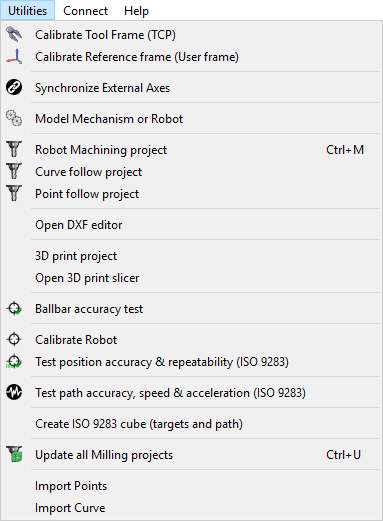
Il menu utilità permette di eseguire comandi specifici:
Calibra Piano di Riferimento Tool (TCP) permette di calibrare un TCP fornendo dati da un setup vero, ad esempio la configurazione giunti per raggiungere un punto da differenti orientamenti. Questa procedura è solitamente disponibile in tutti i tech pendant. RoboDK permette di calibrare un TCP con quante configurazioni lo si desidera. Utilizzando più configurazioni si ha un valore del TCP più accurato. Più informazioni riguardo alla calibrazione TCP.
Calibra Piano di Riferimento permette di identificare un piano di riferimento con rispetto del piano della base del robot. Ciò permette di far corrispondere la parte del setup reale con quella dell'ambiente virtuale. Più informazioni sulla Calibrazione dei Piani di Riferimento.
Sincronizza Assi Esterni permette di impostare uno o più assi esterni ed un robot come un meccanismo robot. Più informazioni disponibili nella sezione Assi Esterni.
Progetto di fresatura può facilmente convertire percorsi CNC in programmi robot. RoboDK può importare programmi fatti per CNC a 5 assi utilizzando software CAM. come file generici G-code o file APT. Questi programmi/percorsi possono esser facilmente simulati e convertiti in programmi robot con RoboDK. Più informazioni disponibili in questa sezione.
Il Progetto segui curva è come un progetto fresatura ma permette di selezionare curve estratte da una geometria 3D come percorsi. È anche possibile selezionare Importa Curva per importare curve 3D come file CSV o TXT. Queste curve devono essere fornite come una lista di punti XYZ e, opzionalmente, vettori IJK. Più informazioni disponibili nella sezione progetto segui curva
Il Progetto segui punto è come un progetto fresatura ma permette di selezionare punti estratti da una geometria 3D e creare facilmente percorsi robot. È anche possibile selezionare Importa Punti per importare punti 3D da file CVS o TXT. Questi punti devono essere forniti come lista di punti XYZ e, opzionalmente, vettori IJK. Più informazioni disponibili nella sezione progetto segui punti
Seleziona Progetto stampa 3D per generare un programma di stampa 3D robotizzata per uno specifico oggetto. L'oggetto deve essere disponibile nella stazione RoboDK. Il percorso di stampa 3D è convertito in G-code dietro le quinte utilizzando uno Slicer e poi trattato come un percorso di fresatura a 3 assi. Più informazioni disponibili nella sezione stampa 3D robotizzata
Il test di Accuratezza con Ballbar permette di controllare la performance del robot utilizzando uno strumento telescopico a doppia ballbar. Più informazioni disponibili qui: https://robodk.com/ballbar-test
Calibra Robot permette di impostare un progetto di calibrazione robot per migliorarne l'accuratezza e trovare parametri di errore robot. Un robot calibrato può essere usato in ogni progetto di Programmazione Offline di RoboDK. La calibrazione robot solitamente migliora l'accuratezza di 5 volte o più, dipendentemente dal modello del robot. La calibrazione robot richiede strumenti di misurazione. Più informazioni disponibili qui: https://robodk.com/robot-calibration
Nota: Alcuni di questi strumenti potrebbero richiedere una specifica licenza che estende la licenza di default.