Pannello Robot
Fai doppio click sull'oggetto robot nell'albero (o nella vista 3D) per aprire il pannello robot.
È possibile muovere gli assi robot dalla sezione Jog assi giunti e immettere un valore specifico nella casella di testo. Questi valori e la posizione corrispondono ai valori sul controllore robot. Fai doppio click sui limiti giunti per modificare i limiti assi. Di default, RoboDK utilizza i valori hardware dalle specifiche del produttore. Alcune applicazioni potrebbero richiedere limiti più ristretti (limiti software). I valori giunti possono essere copiati 

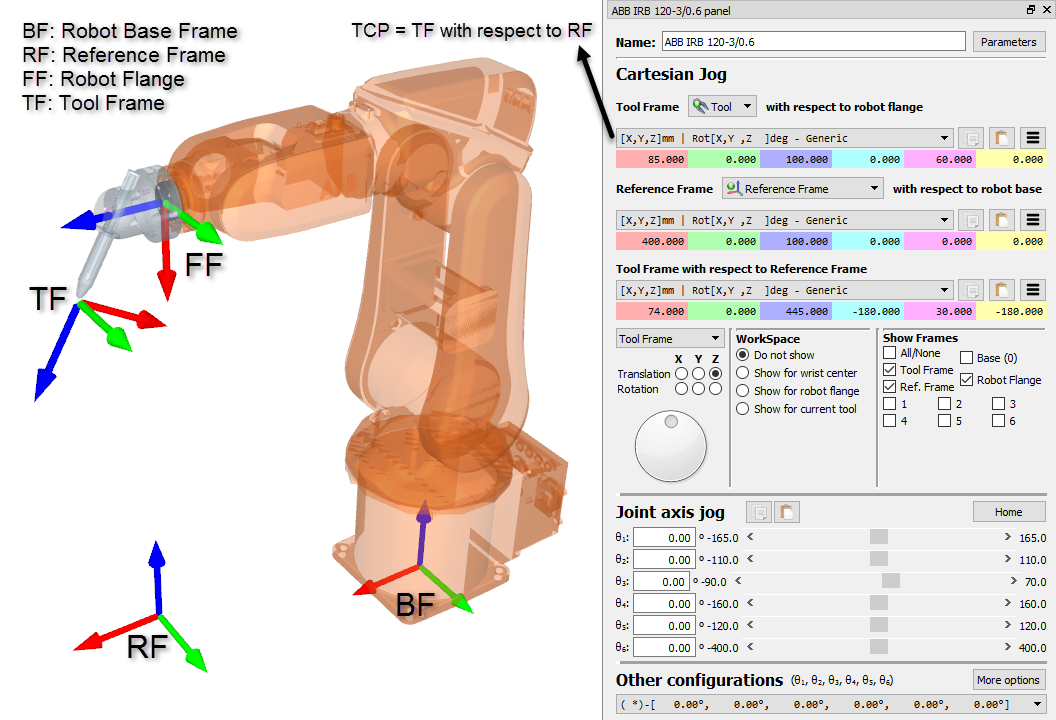
La sezione di Jog Cartesiano mostra tutte le informazioni collegate alle cinematiche robot:
●Il Piano del Tool (TF) con rispetto della Flangia del Robot (FF) definisce dove il Piano del Tool selezionato è posizionato con rispetto della Flangia Robot. La Flangia Robot è sempre la stessa, tuttavia, il Piano Tool cambia dipendentemente dal tool montato sul robot. Questa relazione è anche conosciuta come UTOOL, ToolData o solamente Tool in molti controllori. Il Tool del Robot è anche conosciuto come TCP (Tool Center Point). Il Tool selezionato diventa tool "Attivo". Il tool attivo è utilizzato quando crei nuovi bersagli e programmi. Il tool selezionato viene visualizzato con un icona verde: 
●Il Piano di Riferimento (RF) con rispetto della Base Robot (BF) definisce dove il piano di riferimento è localizzato con rispetto della base del robot. Il piano di riferimento della base non si muove mai, tuttavia, piani di riferimento diversi possono essere usate per posizionare qualunque oggetto con riferimento della stessa base del robot. La relazione è anche conosciuta come UFRAME, WorkObject, MFRAME o Reference in molti controllori. Il piano di riferimento selezionato nel pannello robot diventa piano di riferimento "Attivo". Il piano di riferimento attivo è utilizzato come riferimento per nuovi bersagli e programmi robot. Il piano di riferimento selezionato viene visualizzato con un icona verde: 
●Il Piano del Tool (TF) con rispetto del Piano di Riferimento (RF) mostra la posizione del TCP attivo con rispetto del piano di riferimento attivo per la posizione attuale del robot. Modificare questo valore per muovere il robot. I giunti degli assi saranno ricalcolati automaticamente. Queste coordinate cartesiane sono registrate quando un nuovo bersaglio è creato (Programma➔Insegna Bersaglio), assieme agli assi robot. Il bersaglio è anche collegato al piano di riferimento attivo.
Una lista di possibili configurazioni è disponibile nella sezione Altre configurazioni. La configurazione robot definisce uno specifico stato del robot senza attraversare singolarità. Cambiare la configurazione richiede attraversare una singolarità. Più informazioni disponibili nella sezione Configurazioni Robot
Infine, il pulsante Parametri in alto a destra permette di fare alcuni aggiustamenti alle cinematiche, selezionare il post processore preferito o estrarre parametri accurati dopo che il progetto è stato calibrato. Modificare questi valori è richiesto solamente in circostanze speciali.