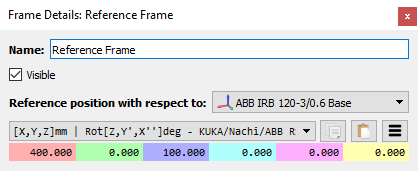
Piano di Riferimento
Fai doppio click su un Piano di Riferimento 
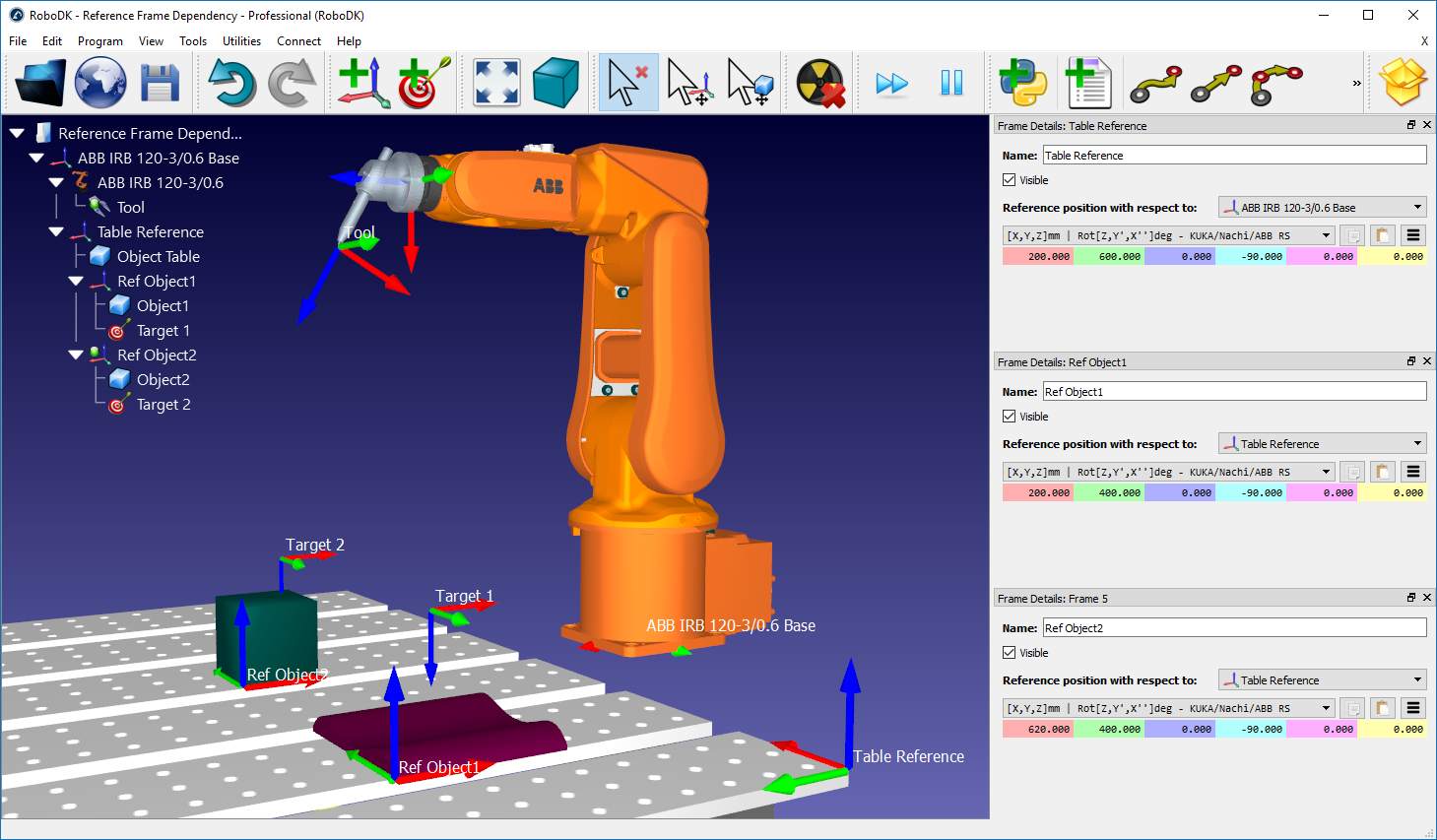
Piani di riferimento multipli possono essere collegati gli uni agli altri per costruire dipendenza che esistono nell'applicazione reale. Per esempio, un tavolo può avere una posizione specifica con rispetto del robot, poi due o più oggetti sul tavolo possono avere posizione specifica con rispetto del tavolo. Spostare il tavolo non altererà la relazione tra gli oggetti ed il tavolo ma altererà la relazione di tutti gli oggetti con rispetto del robot. L'immagine seguente fornisce un esempio.