Meccanismo Personalizzato
Un meccanismo è un dispositivo con componenti che si muovono. Diversi tipi di meccanismi possono essere costruiti dipendentemente da come le parti che si muovono (collegamenti) sono connesse fra di loro.
Certi tipi di meccanismi possono essere modellati in RoboDK come 1T, 2T.
Anche un braccio robotico è considerato un meccanismo. Un braccio robotico industriale è tecnicamente un meccanismo 6R. Nuovi bracci robotici posson esser modellati in RoboDK (un robot è un meccanismo).
Meccanismi possono esser simulati individualmente o lavorando assieme con altri robot o meccanismi. Quando una cella robot ha un meccanismo (come una tavola girevole) può essere utilizzata come posizionatore o meccanismo sincronizzato.
Nuovi robot possono anche essere modellati in RoboDK.
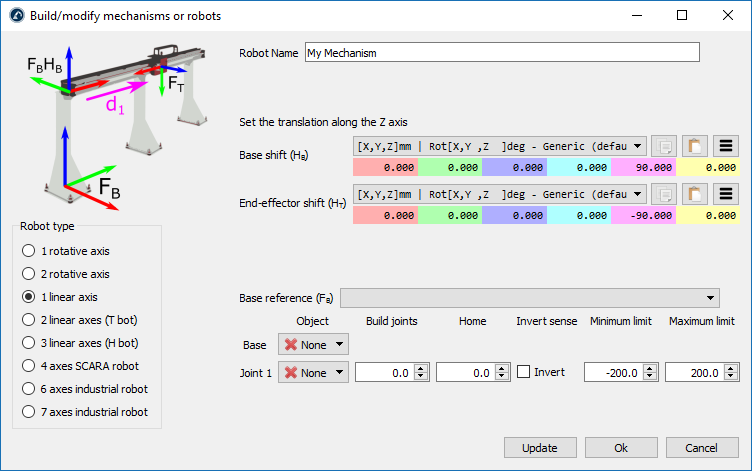
Modellare un asse lineare
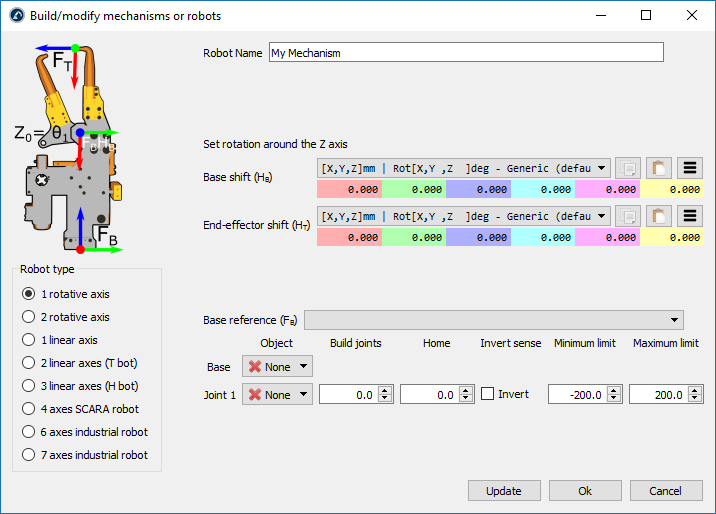
Modellare una tavola girevole
Calibrate a turntable
Modellare un robot a 3 assi
Sincronizzare assi con il robot
Meccanismi o assi esterni posson essere utilizzati assieme a robot industriali per estendere lo spazio di lavoro per una specifica applicazione di manifattura, come saldatura o fresatura.
Il termine "sincronizzazione multi-asse" si riferisce al movimento, il quale richiede coordinazione, e alle tecniche utilizzate per ottenere il controllo del movimento.