Esempio di client OPC UA
Questo esempio le mostrerà come può aggiungere la connettività OPC-UA Client a RoboDK. RoboDK include un add-in OPC-UA che le consente di aggiungere la compatibilità OPC UA ai suoi progetti RoboDK.
In questo esempio imparerà come ottenere i dati dalla RoboDK Station tramite il client OPC UA.
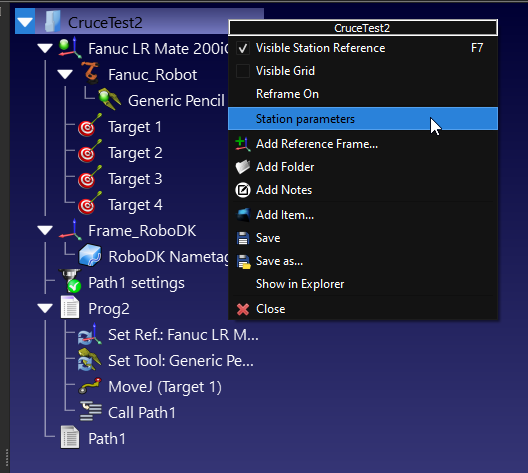
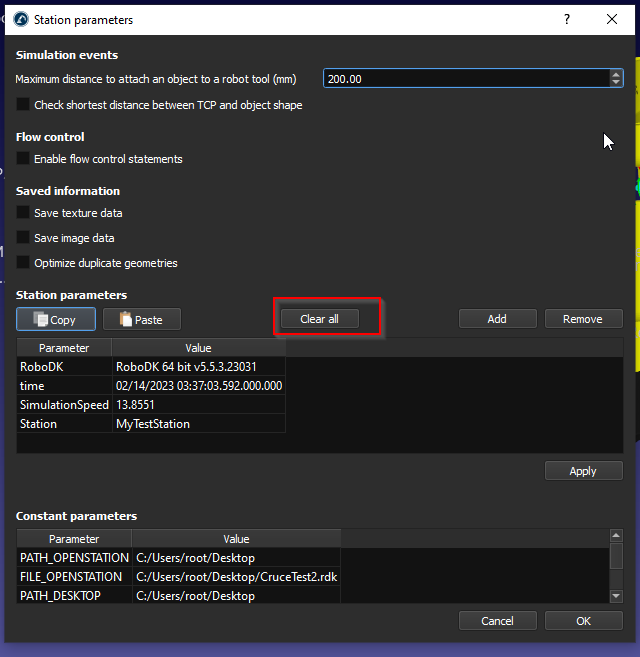
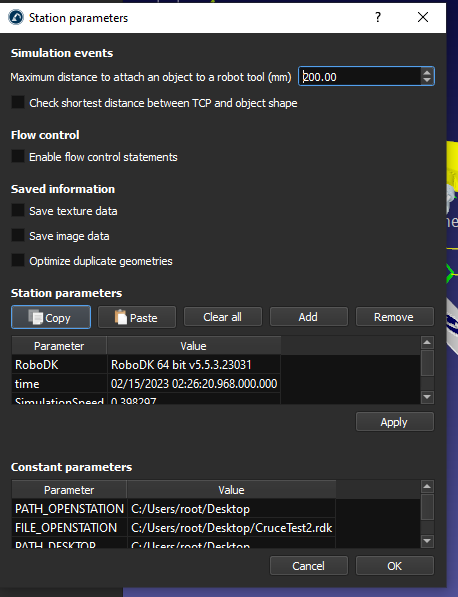
Viene visualizzata la schermata dei parametri della stazione e prema "Cancella tutto" per cancellare tutti i parametri della stazione.
Implementazione con interfaccia
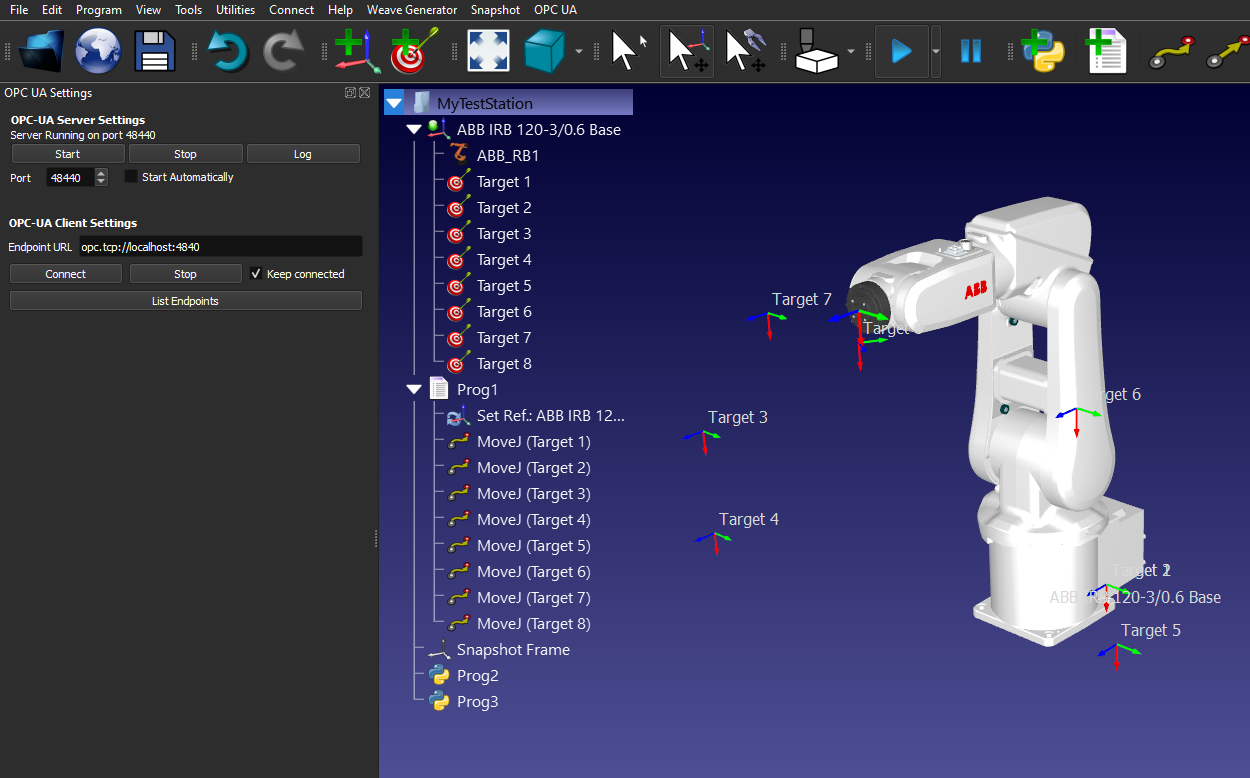
Possiamo creare un altro progetto RoboDK con il server OPC UA configurato e avviato.
Aggiungi cliente
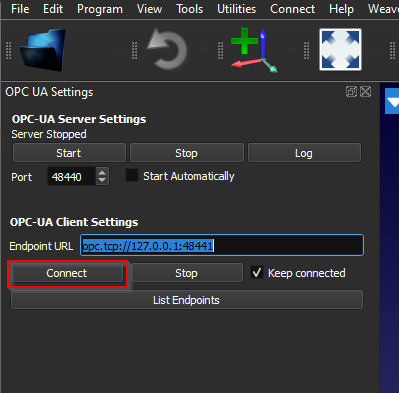
Questa sezione mostra come aggiungere un client OPC UA.
Inserisca l'URL dell'endpoint, ad esempio: opc.tcp://127.0.0.1:48441.
Deve abbinare l'indirizzo IP e la configurazione della porta al suo server OPC UA di destinazione.
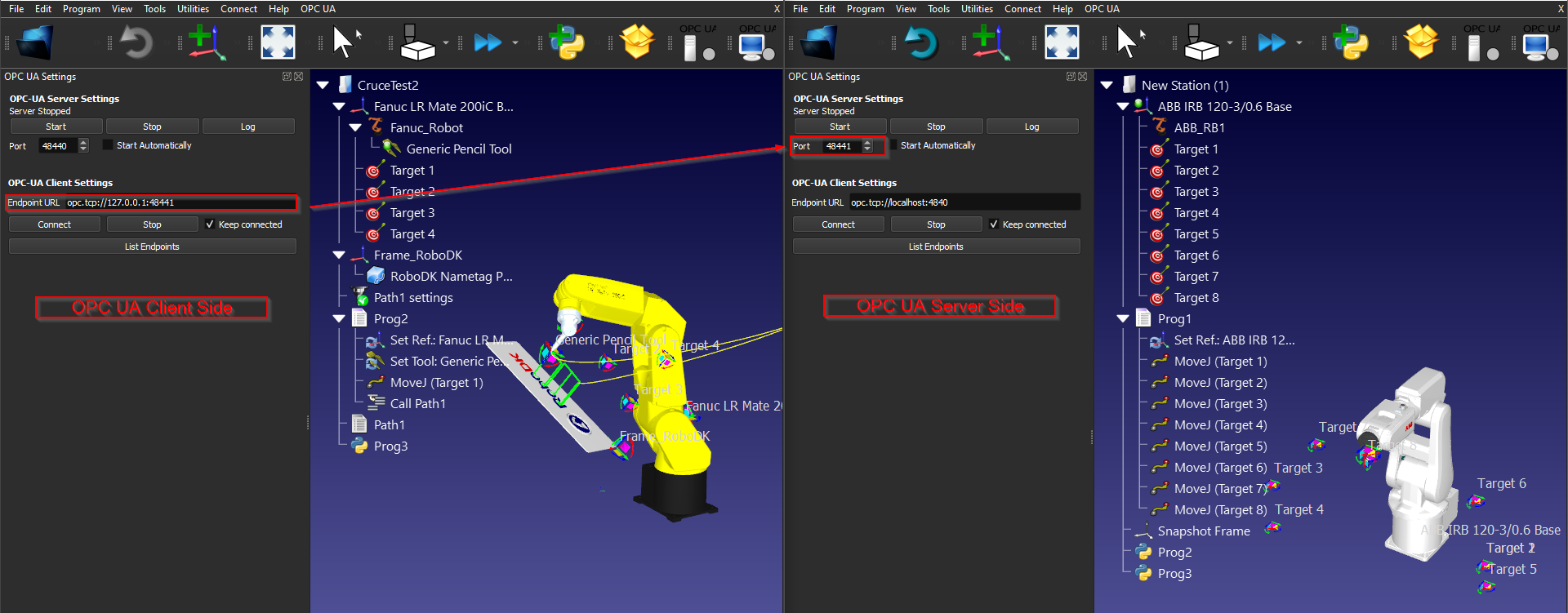
Premere "Connetti" per stabilire la connessione.
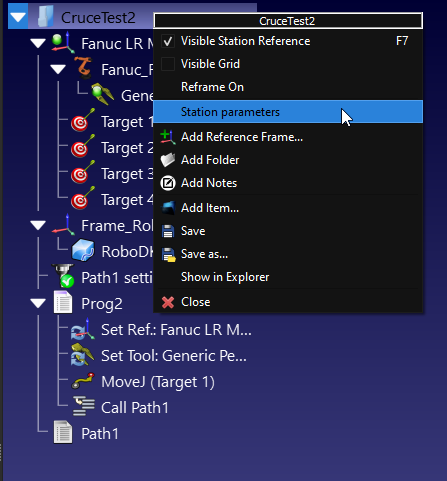
se appare un messaggio con" Recupero delle variabili del server. Clicchi con il tasto destro del mouse sull'elemento della stazione e selezioni 'Parametri della stazione' per vedere le variabili", la connessione è stabilita.
Clicchi con il tasto destro del mouse sulla sua Stazione e selezioni "Parametri della Stazione".
Nodi client
Può controllare i dettagli di ogni Nodo dalla sezione Nodi.
Implementazione con l'API RoboDK
Dopo aver ottenuto i dati dei nodi dal server OPC UA tramite il client OPC UA in RoboDK, può anche ottenere questi dati utilizzando RoboDK-Python-API.
Installazione
Può fare riferimento a questo link per installare la Python-API di RoboDK.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
Oppure installi manualmente il pacchetto RoboDK per Python:
pip installare robodk
Script
Questo esempio di script mostra come ottenere i parametri della stazione tramite l'API Python di RoboDK.
da robodk importa robolink # API RoboDK
RDK = robolink.Robolink()
da robodk importa * # API RoboDK
da robolink import * # Robot toolbox
itemlist = RDK.ItemList()
se itemlist:
# Ottenere tutti i parametri della stazione
print('I parametri Vaild sono configurati nella sua Stazione...')
StationParameters=RDK.getParams()
per StationParameter in StationParameters:
print("Parametri stazione %s : %s"%(Parametro stazione[0],str((Parametro stazione[1]))))
altro:
print('Nessun elenco di parametri...')
Ecco il risultato dello script di esempio:
I parametri Vaild sono configurati nella sua Stazione...
Parametri della stazione RoboDK : RoboDK 64 bit v5.5.3.23031
Parametri della stazione ora : 02/14/2023 03:58:29.191.000.000
Parametri della stazione SimulationSpeed : 13,8551
Parametri della stazione Stazione : MyTestStation