Implementazione con UaExpert
Può utilizzare il software UaExpert per testare la connettività con il Server OPC UA RoboDK.
Può scaricare la versione gratuita del software UaExpert dal sito web di Unified Automation: https://www.unified-automation.com/downloads/opc-ua-clients.html.
Aggiungi il server UaExpert
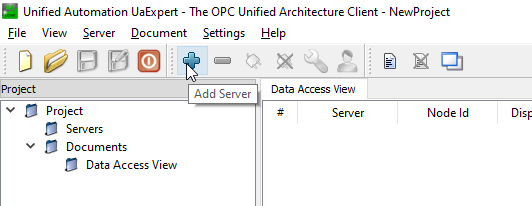
Avvii UaExpert e clicchi sul pulsante "+" per aggiungere il server RoboDK OPC UA.
Espanda la sezione Custom Discovery e selezioni l'opzione <Doppio clic per aggiungere il server.> per aggiungere il server RoboDK OPC UA.
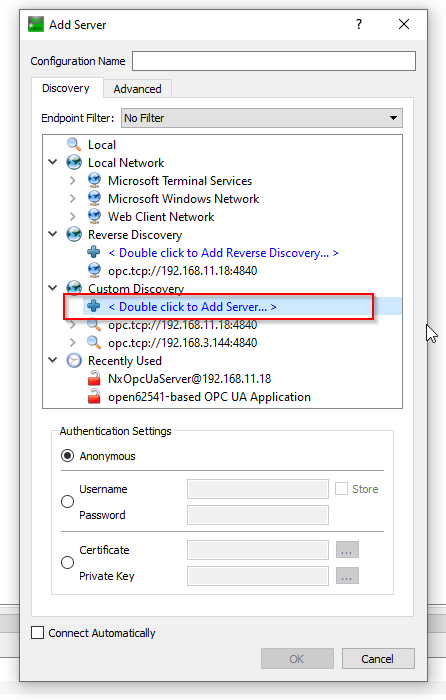
Inserisca l'URL del server OPC UA, opc.tcp://127.0.0.1:48440 che ha configurato nel passaggio precedente.
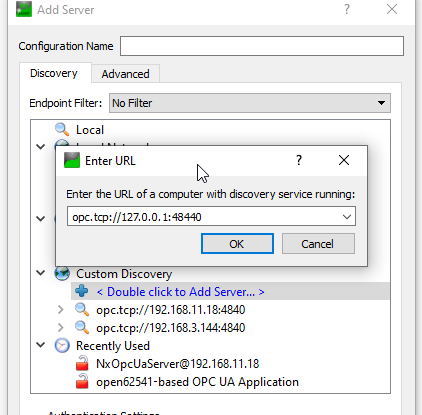
Colleghi il Server OPC UA con la sicurezza "Nessuno".
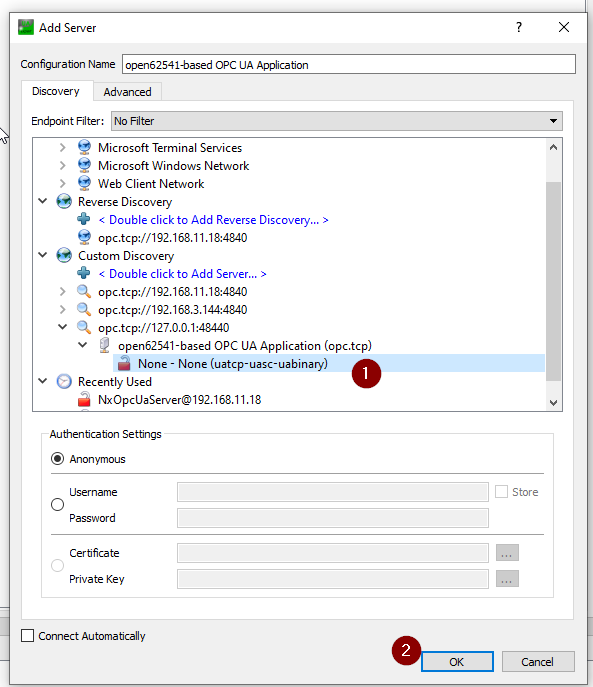
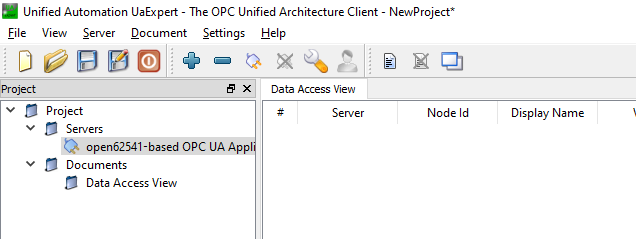
Il server è configurato.
Si connetta al server
Ora può collegarsi al server RoboDK OPC UA da UaExpert.
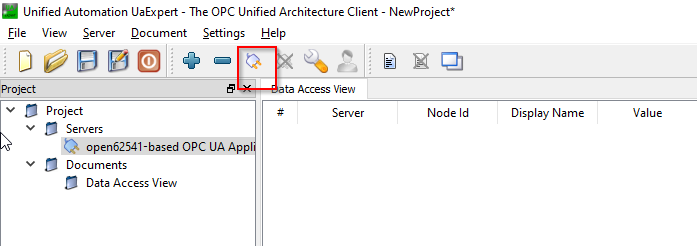
Può vedere i Nodi e i Metodi quando viene stabilita la connessione.

Nodi server
Ci sono alcuni nodi all'interno del server RoboDK OPC UA che le permettono di scambiare alcune informazioni di base sulla sua stazione.
RoboDK
Il nodo RoboDK è un nodo che fornisce la versione effettiva del suo software RoboDK.
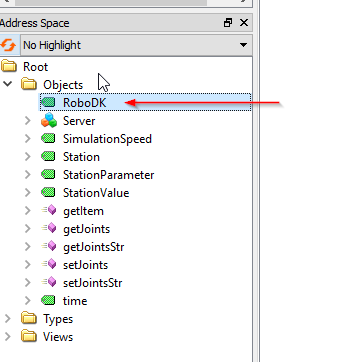
In questo esempio è stata utilizzata la versione RoboDK 64 Bit v5.5.3.23031.

SimulationSpeed
La Velocità di simulazione è un nodo che mostra la Velocità di simulazione attuale e consente all'utente di sovrascrivere la Velocità di simulazione corrente.
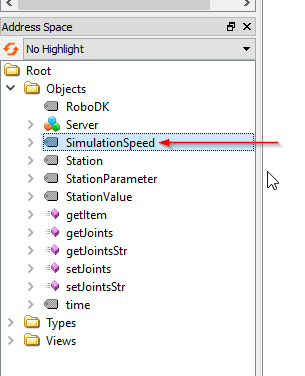
Il valore del nodo è riferito alla barra di scorrimento della velocità di simulazione.
La Simulazione corrente può essere letta da questo nodo e può sovrascrivere la velocità di simulazione.

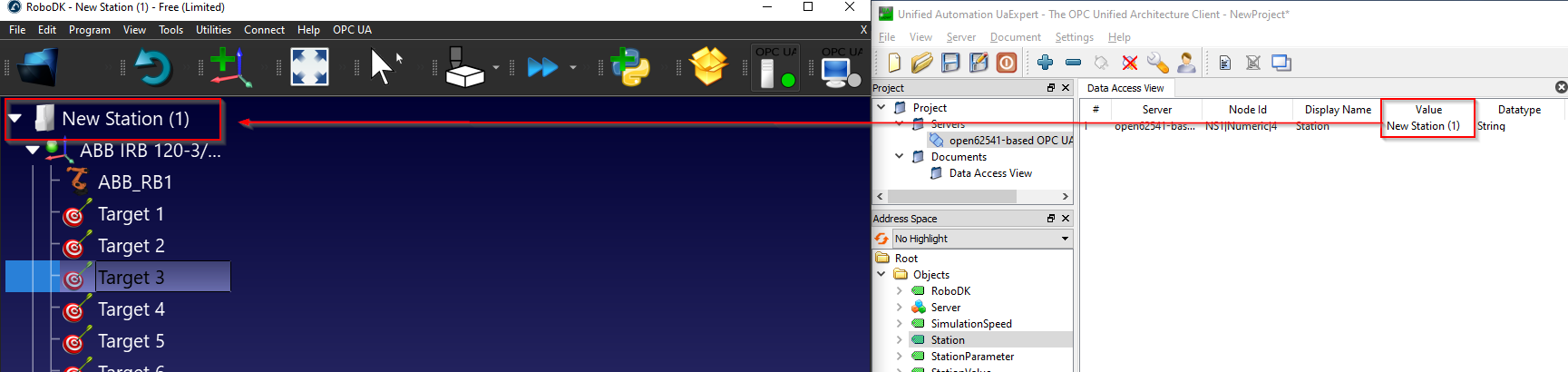
Stazione
Il Nodo Stazione è un nodo che consente all'utente di ottenere il nome attuale della Stazione in RoboDK.
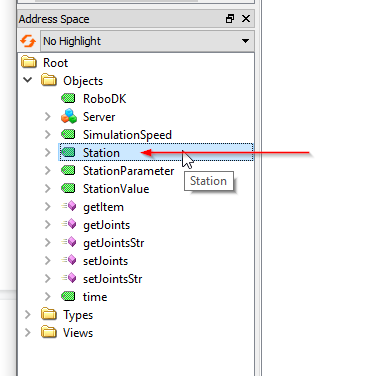
Come si vede qui sotto, il nodo Stazione fa riferimento al suo "Nome Stazione" in RoboDK.
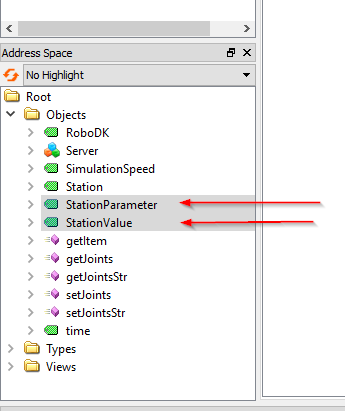
Parametri della stazione/Valore della stazione
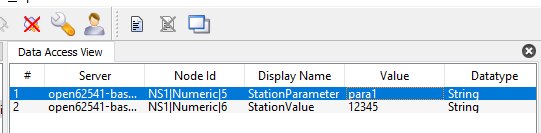
Station Parameter e Station Value sono una coppia di Nodi che consente all'utente di ottenere o impostare qualsiasi parametro all'interno della sua Stazione. Il Server OPC UA RoboDK monitorerà continuamente il valore effettivo di "StationParameter" e restituirà il valore di tale "StationParameter", dal Nodo Station Value.
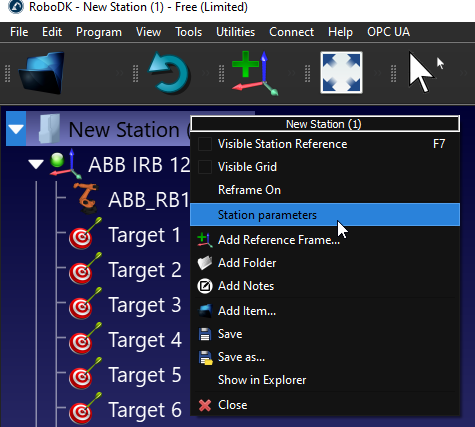
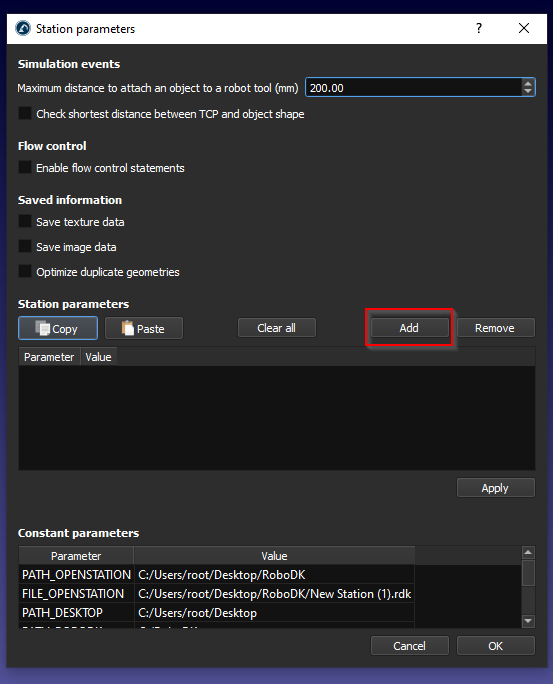
Può visualizzare i parametri della sua Stazione facendo clic con il pulsante destro del mouse sulla sua Stazione RoboDK>Parametri della Stazione.
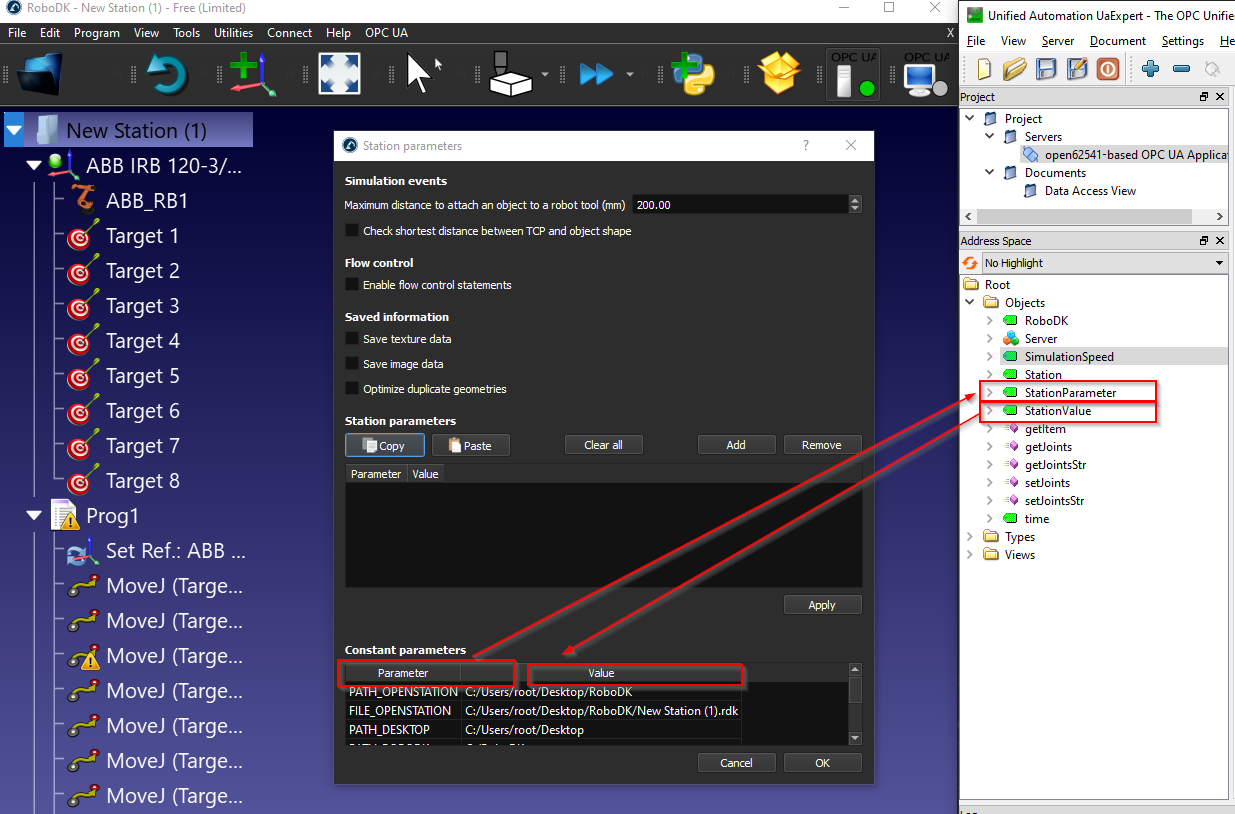
Nel campo Parametri costanti, può vedere i parametri predefiniti della stazione e il loro valore.
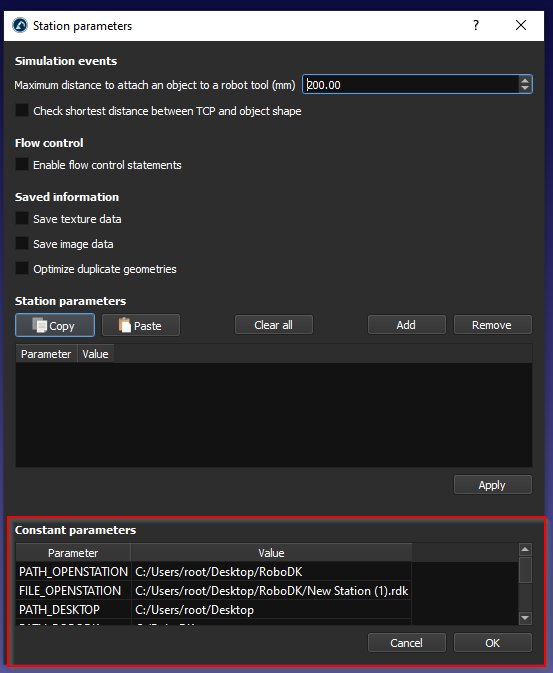
Il parametro della stazione fa riferimento al campo "Parametro" e il valore della stazione fa riferimento al campo "Valore".
E possiamo creare i nostri parametri cliccando sul pulsante "Aggiungi".
Viene aggiunto un nuovo parametro Stazione.
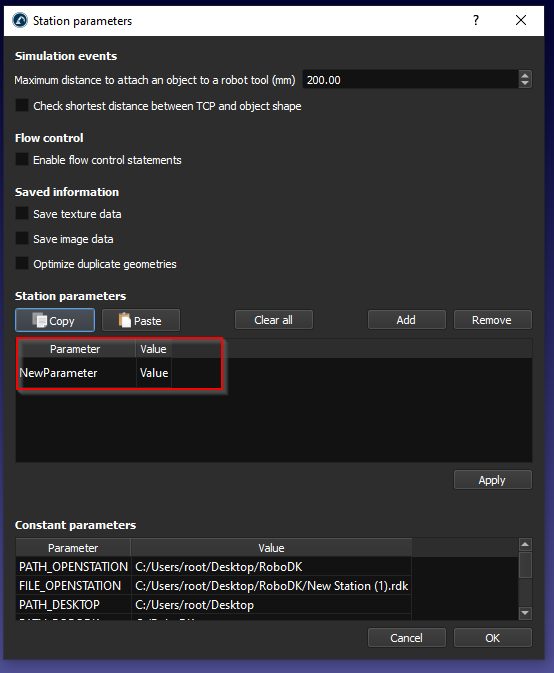
Inserisca il nome del parametro e il valore del parametro, quindi prema Applica per salvarlo.
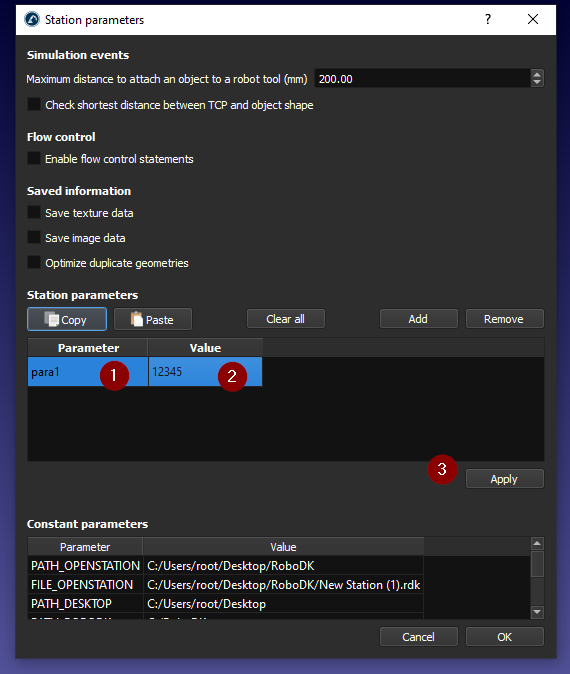
Può anche ottenere il suo parametro di stazione personale.
Tempo
Il nodo time è un nodo che le permette di ottenere l'ora attuale della RoboDK Station.
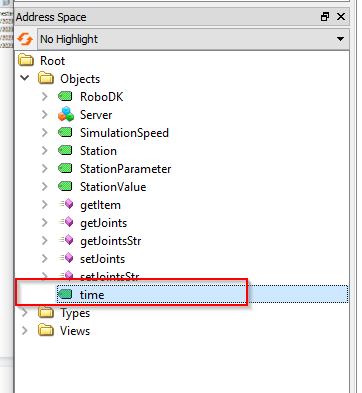
Viene restituito un valore con il formato DataTime.

E questo Nodo viene aggiornato continuamente.

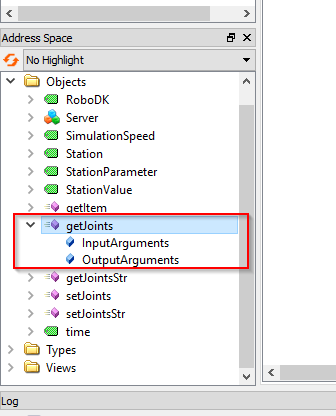
Metodi
Il server RoboDK OPC UA è dotato anche di alcuni metodi per consentire all'utente di accedere ai dati della stazione RoboDK in modo dinamico.
Possiamo semplicemente fare clic con il pulsante destro del mouse su Metodo>Chiama per eseguire il metodo.
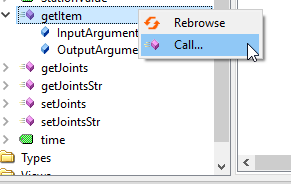
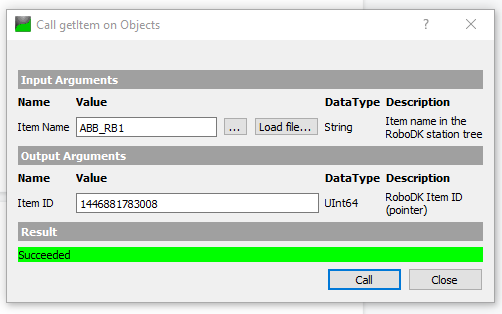
getItem
getItem è un metodo che consente all'utente di ottenere il puntatore del suo elemento.
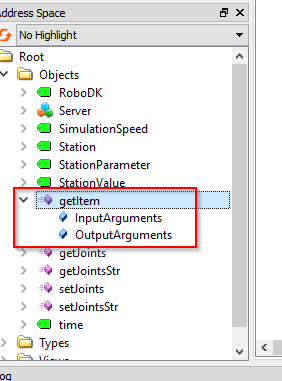
Per gli InputArguments, è necessario il Nome del dispositivo, si può immaginare che il Nome del dispositivo sia il Nome della stazione, il Nome del robot, ecc. E Item ID è l'OutputArguments che restituisce il puntatore di quel dispositivo.
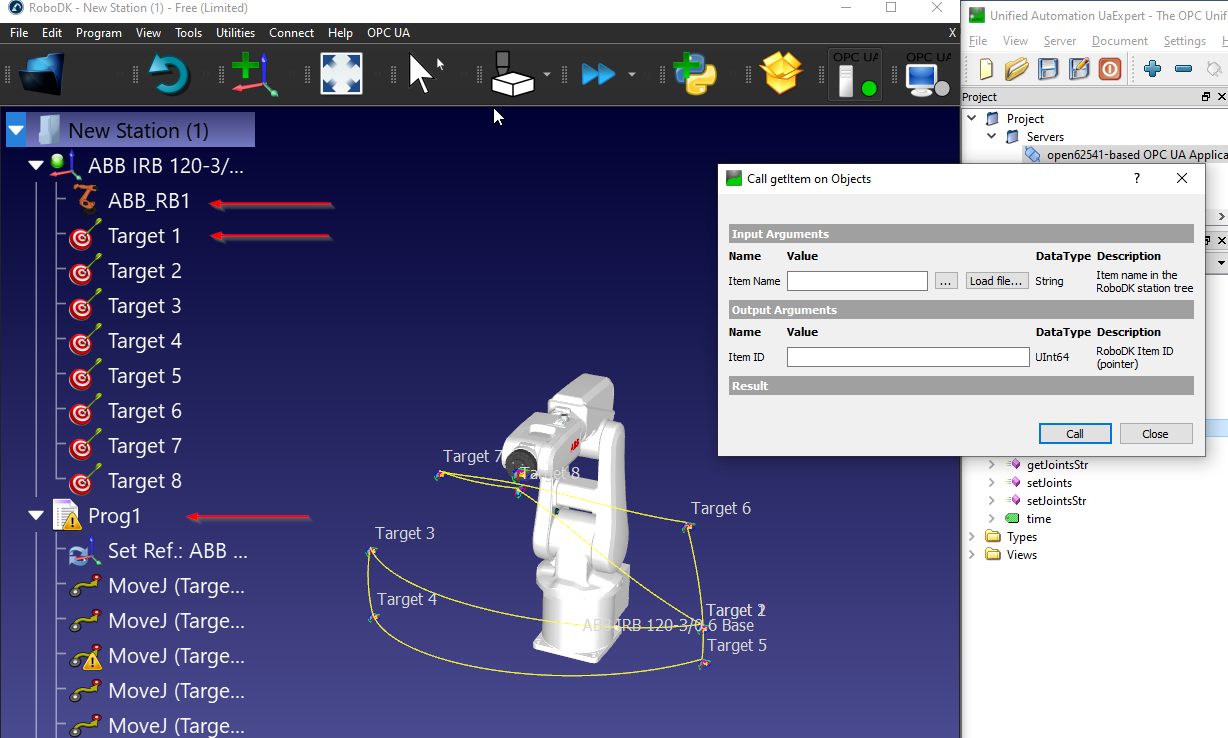
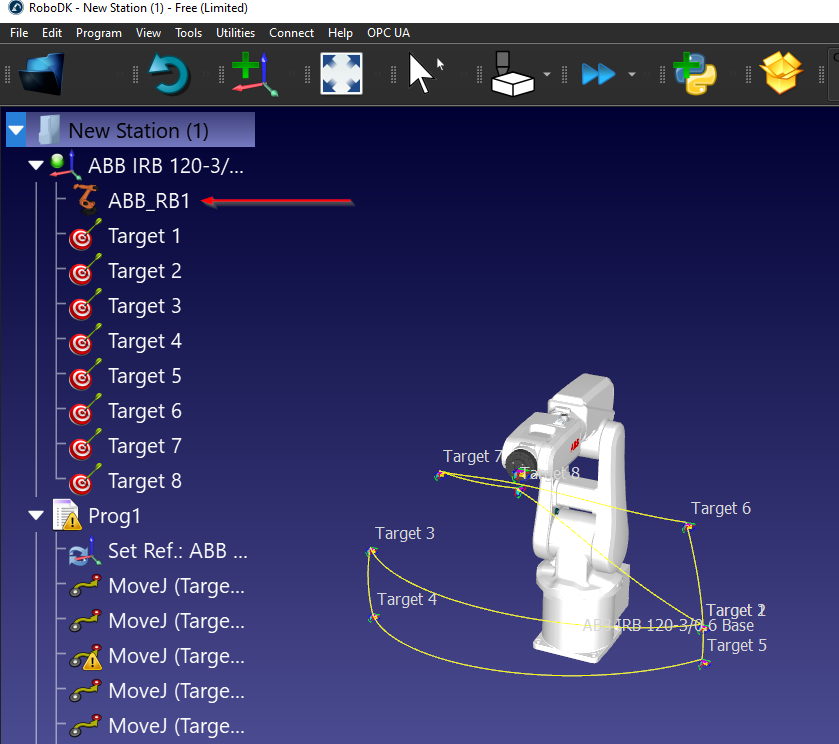
In questo esempio, ho ricevuto l'ID articolo (puntatore) del mio robot ABB che si chiama "ABB_RB1".
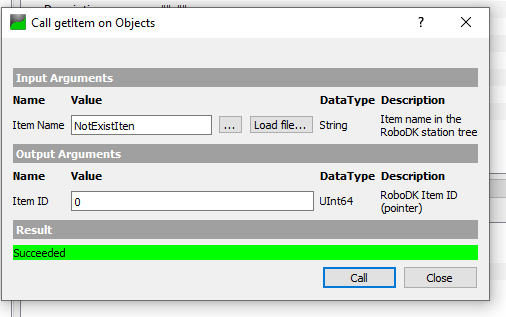
0 viene restituito se il nome dell'articolo non è valido o non esiste nella sua stazione.
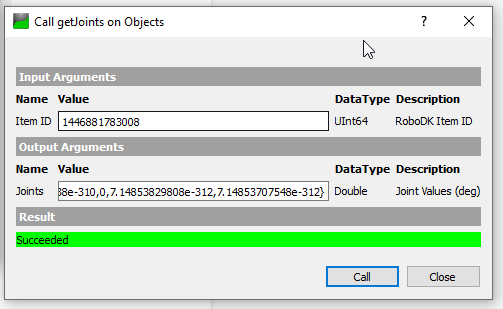
getJoints
getJonits è un metodo che consente all'utente di ottenere il valore del giunto del robot dalla stazione, in base all'ID dell'oggetto.
L'ID dell'elemento è il valore del puntatore del suo elemento e può ottenerlo dal metodo getItem().
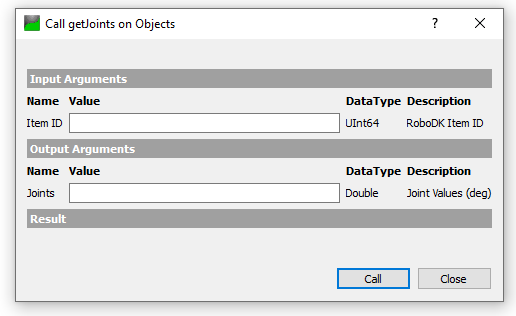
Otterremo l'ID dell'articolo con questo nome di articolo "ABB_RB1" e verrà restituito un valore UInt64.
Il valore dei giunti viene restituito quando si passa l'ID dell'articolo nel metodo che abbiamo ottenuto in precedenza.
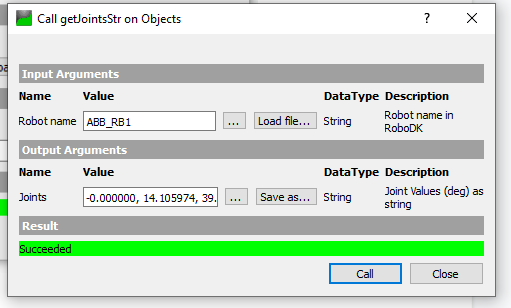
getJointsStr
getJointsStr è un metodo che consente all'utente di ottenere il valore Joints in base a un valore stringa.
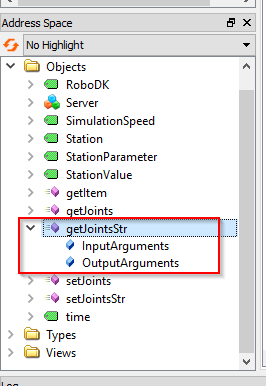
Possiamo passare il nome del robot (String) in questo metodo.
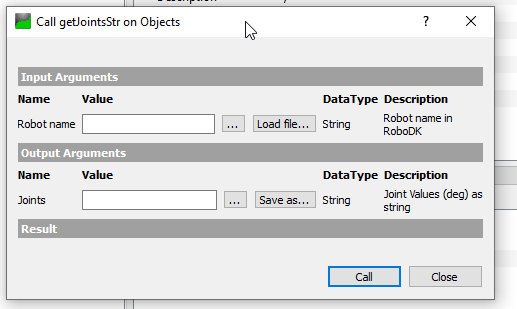
In La mia stazione, ABB_RB1 è il nome del mio robot.
Possiamo semplicemente passare "ABB_RB1" nel parametro Nome robot e chiamare il metodo - Viene restituito il valore del giunto in formato stringa.
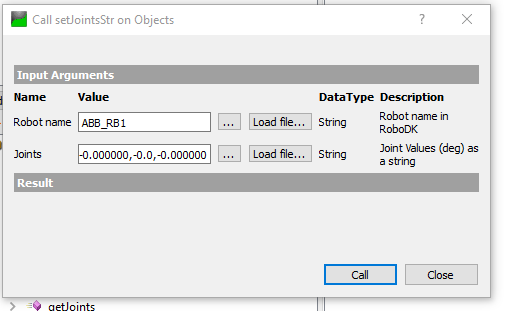
setJointsStr
setJointsStr è un metodo che consente all'utente di impostare il valore Joints del Robot, in base a un valore stringa.
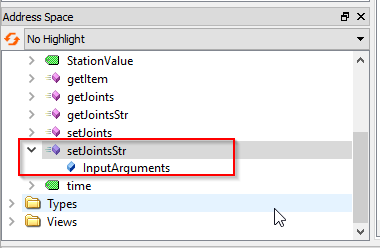
Nel nome del robot, viene passato ABB_RB1 e possiamo semplicemente passare una stringa con il valore del giunto nel parametro Giunti.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000