Metodi
Il server RoboDK OPC UA è dotato anche di alcuni metodi per consentire all'utente di accedere ai dati della stazione RoboDK in modo dinamico.
Possiamo semplicemente fare clic con il pulsante destro del mouse su Metodo>Chiama per eseguire il metodo.
getItem
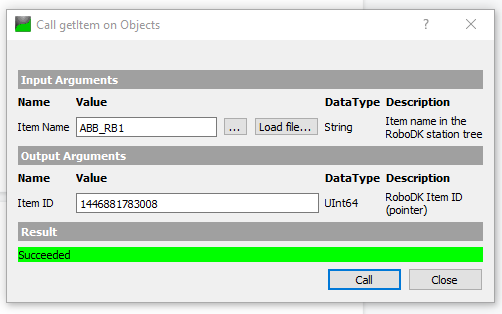
getItem è un metodo che consente all'utente di ottenere il puntatore del suo elemento.
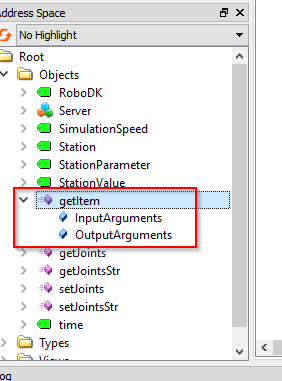
Per gli InputArguments, è necessario il Nome del dispositivo, si può immaginare che il Nome del dispositivo sia il Nome della stazione, il Nome del robot, ecc. E Item ID è l'OutputArguments che restituisce il puntatore di quel dispositivo.
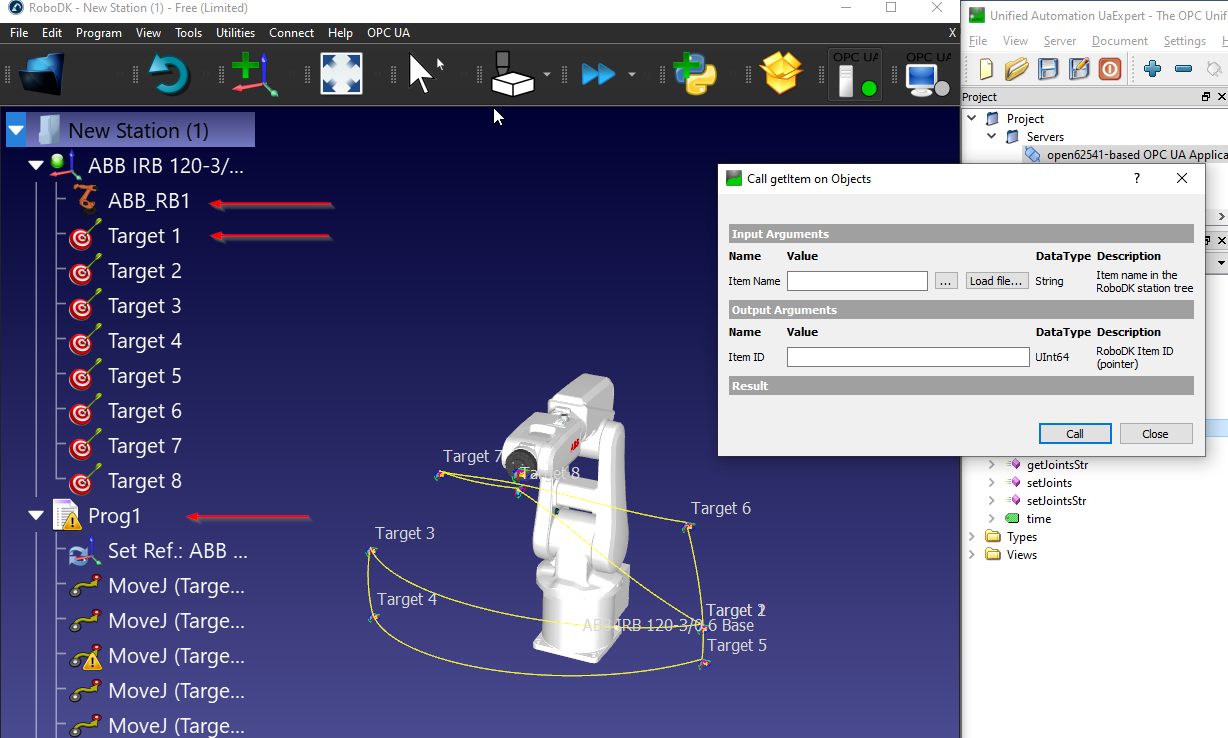
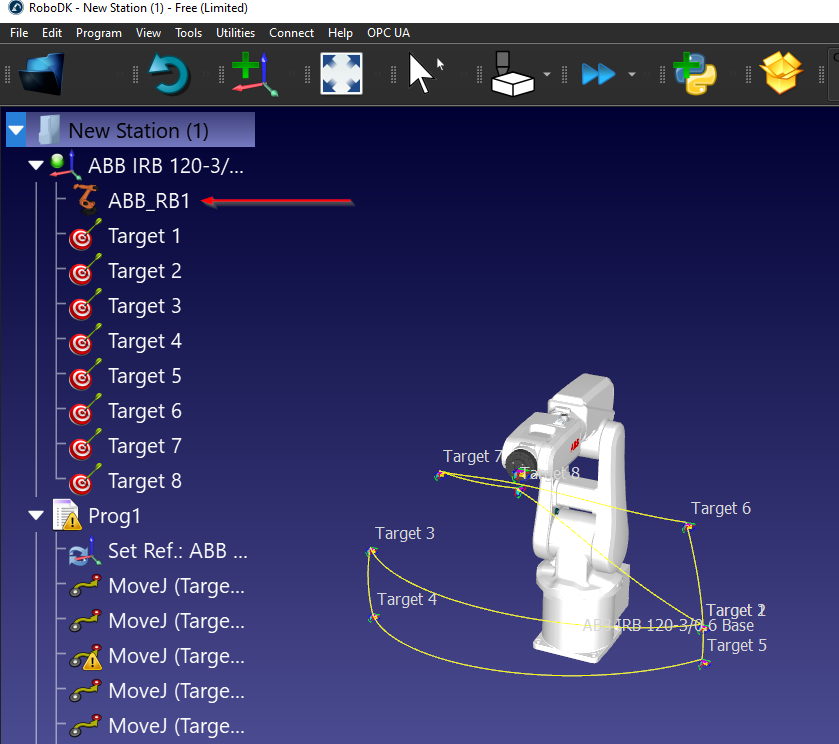
In questo esempio, ho ricevuto l'ID articolo (puntatore) del mio robot ABB che si chiama "ABB_RB1".
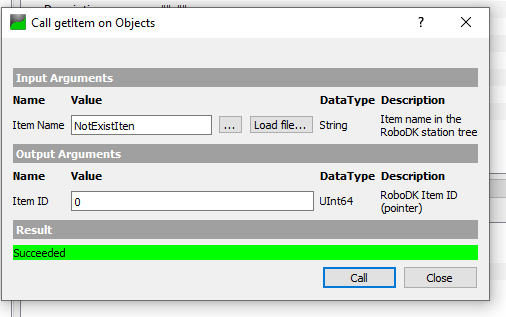
0 viene restituito se il nome dell'articolo non è valido o non esiste nella sua stazione.
getJoints
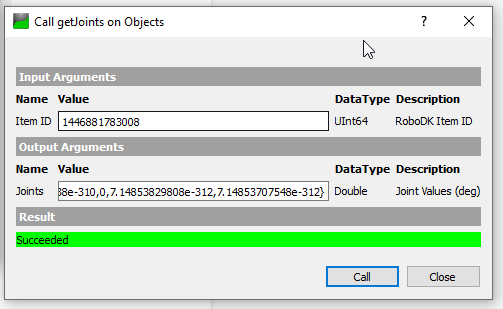
getJonits è un metodo che consente all'utente di ottenere il valore del giunto del robot dalla stazione, in base all'ID dell'oggetto.
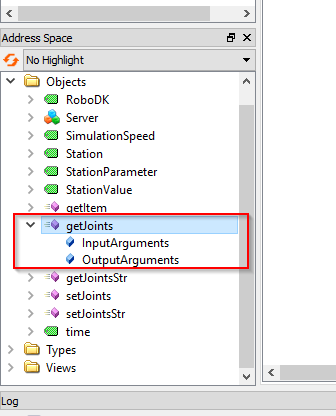
L'ID dell'elemento è il valore del puntatore del suo elemento e può ottenerlo dal metodo getItem().
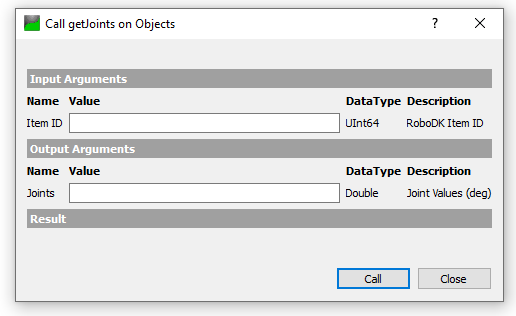
Otterremo l'ID dell'articolo con questo nome di articolo "ABB_RB1" e verrà restituito un valore UInt64.
Il valore dei giunti viene restituito quando si passa l'ID dell'articolo nel metodo che abbiamo ottenuto in precedenza.
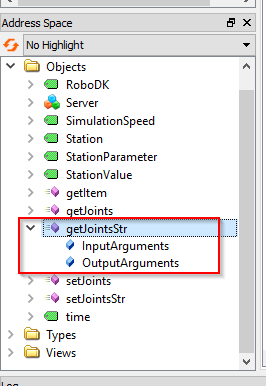
getJointsStr
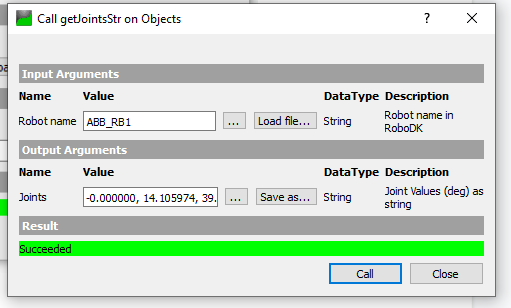
getJointsStr è un metodo che consente all'utente di ottenere il valore Joints in base a un valore stringa.
Possiamo passare il nome del robot (String) in questo metodo.
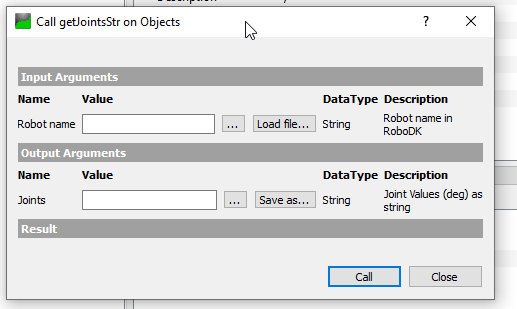
In La mia stazione, ABB_RB1 è il nome del mio robot.
Possiamo semplicemente passare "ABB_RB1" nel parametro Nome robot e chiamare il metodo - Viene restituito il valore del giunto in formato stringa.
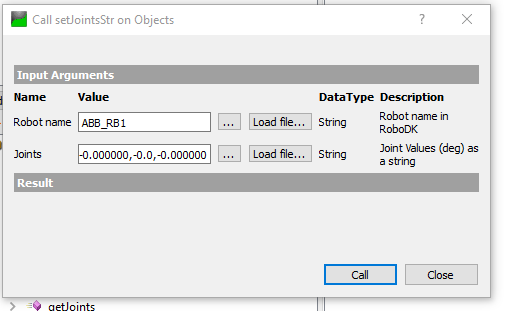
setJointsStr
setJointsStr è un metodo che consente all'utente di impostare il valore Joints del Robot, in base a un valore stringa.
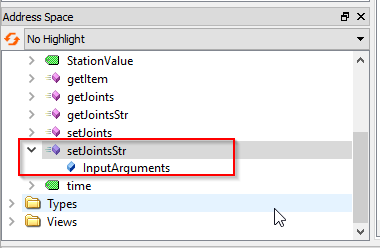
Nel nome del robot, viene passato ABB_RB1 e possiamo semplicemente passare una stringa con il valore del giunto nel parametro Giunti.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000