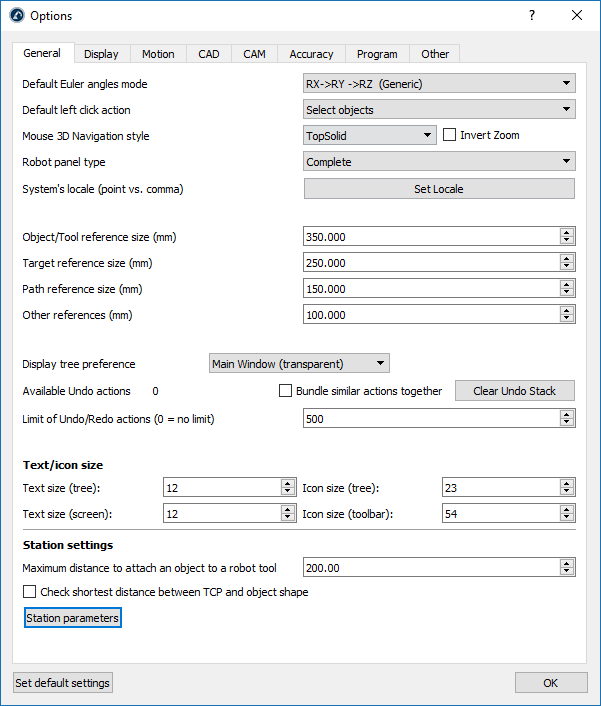
Generali
La modalità di default degli angoli di Eulero permette di selezionare l'ordine in quale le rotazioni dei piani sono eseguite di default. Un piano di riferimento generico contiene informazioni di posizione e orientamento. I piani di riferimento sono pose e possono essere rappresentate utilizzando posizioni XYZ e rotazioni attorno agli assi X,Y e Z. L'ordine delle rotazioni è molto importante. RoboDK pre-seleziona il formato/ordine corretto dipendentemente dal robot utilizzato. Più informazioni nella sezione piani di riferimento.
L'azione di default del click sinistro è impostato di default per selezionare gli oggetti. È possibile modificarlo in altre impostazioni di navigazione 3D, ad esempio rotazione.
Con lo stile di Navigazione Mouse 3D è possibile specificare il tipo preferito di navigazione 3D con il mouse per emulare un software specifico, come Rhinoceros, Catia, TopSolid o Vero.
Il tipo di pannello Robot è impostato su Completo di default. Ciò mostrerà un pannello robot completo. Imposta questa opzione su Normale o Basico per ridurre il numero di opzioni disponibili nel pannello robot.
La locale di sistema permette di impostare la locale per specificare lingua e paese. Ciò mostrerà i numeri nel formato corretto e utilizzerà il corretto carattere per il punto decimale.
Dimensione riferimento Piano/Bersaglio/Percorso/Altro definisce la dimensione del piano sullo schermo per un elemento specifico. È anche raccomandato utilizzare i tasti + e - per ingrandire o rimpicciolire le dimensioni proporzionalmente.
Le preferenze di visualizzazione dell'albero mostreranno l'albero della stazione all'interno della finestra principale di default. Modificala in Finestra Laterale per mostrare l'albero in una finestra separata.
È anche possibile Cancellare la Pila Annulla per cancellare la memoria RAM. È anche possibile limitare le azioni di Annulla/Ripeti salvate in memoria. Se RoboDK è lento potrebbe essere perchè c'è una pila lunga di annulla rimasta salvata. Di default, azioni simili non sono raggruppate assieme. per esempio, se un piano di riferimento viene spostato, ogni piccolo step sarà registrato. Controlla Raggruppa assieme azioni simili per evitare questo comportamento.
La sezione dimensione Testo/Icona permette di modificare la dimensione del testo e delle icone nell'albero e nella toolbar.
La Distanza massima di collegamento di un oggetto al tool del robot è utilizzata come una simulazione di un evento. Eventi simulati possono collegare oggetti al tool e simulare eventi specifici. Questi eventi non hanno impatto sul codice generato, sono solo utilizzati per scopi di simulazione.
I Parametri della stazione sono parametri salvati nel file RDK e possono essere modificati manualmente tramite l'API. I parametri della stazione permettono di simulare Input Digitali e Output Difitali e comunicare la simulazione con altri sistemi tramite l'API come un PLC.