Movimento
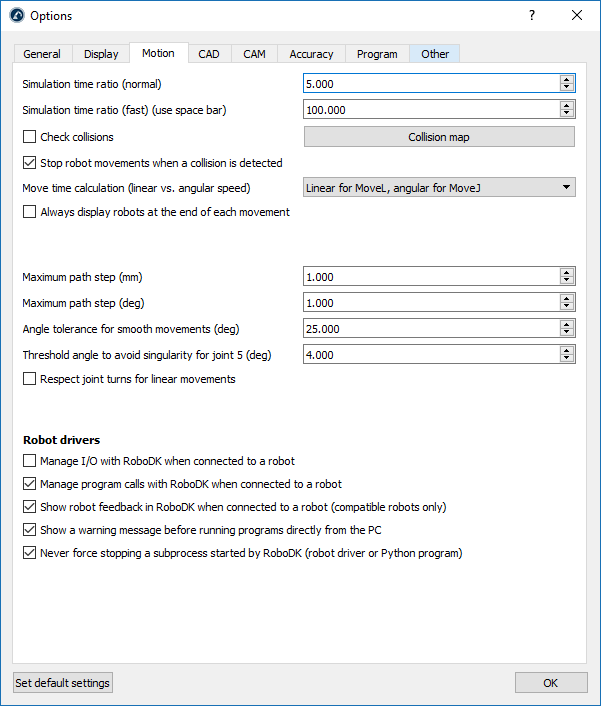
La ratio di simulazione definisce quanto veloce avviene la simulazione rispetto al tempo reale. La ratio di simulazione di 5 di default significa che 1 secondo del simulatore equivale a 5 secondi nel tempo reale sul robot. Più informazioni disponibili nella sezione Ratio Simulazione.



I calcolo del tempo di movimento definisce come RoboDK calcola il tempo ciclo e come il robot utilizza le istruzioni lineari/angolari velocità/accelerazione per simulazione e tempo. Più informazioni disponibili nella sezione Tempo Ciclo.
Se la ratio di simulazione è troppo veloce il computer potrebbe non esser in grado di visualizzare il robot alla fine di ogni tracciato per mantenere una simulazione veloce. Per evitare questo effetto: seleziona Mostra sempre robot alla fine di ogni movimento.
Il passo massimo (mm/grado) definisce come RoboDK discretizza ogni movimento lineare e giunti per finalità di simulazione.
Il Limite angolo per evitare singolarità sul giunto 5 (gradi) è utilizzato per robot a 6 assi per evitare le singolarità del polso. Se una singolarità viene rilevata, il programma robot deve essere modificato in modo da essere sicuri sia eseguito correttamente nel controller reale.
La sezione Driver Robot permette di specificare il comportamento dei driver robot. I driver robot permettono di avere un collegamento diretto tra il robot reale e RoboDK.
Gestisci I/O con RoboDK quando connesso ad un robot reale simulerà Input e Output come parametri RoboDK invece che alterare lo stato di Input/Output sul robot.
L'opzione Mostra feedback robot in RoboDK quando connesso ad un robot mostrerà i movimenti robot in tempo reale come il robot si muove.
Mostra un messaggio di avviso prima di iniziare un programma direttamente dal PC mostrerà una finestra popup prima che un programma sia eseguito dal PC (quando è utilizzata l'opzione Inizia su Robot).
Deselezione Non forzare lo stop di un subprocesso iniziato da RoboDK se riscontri problemi con i driver robot. Ciò assicurerà che nessun altro processo sia in esecuzione dietro le quinte quando una nuova connessione è impostata.