Programma
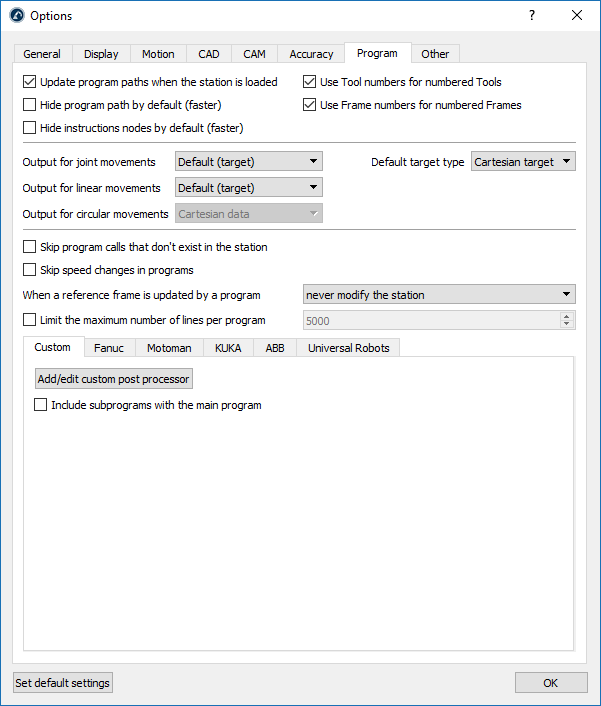
La scheda Programma visualizza impostazioni relative ai programmi.
Selezionare Aggiorna percorso programma quando la stazione viene caricata aggiornerà qualunque problema nei programmi e visualizzerà i programmi che hanno problemi con un simbolo: 
Selezionare Nascondi percorso programma di default non visualizzerà il percorso del programma quando nuovi programmi sono generati. Clicca con il tasto destro sul programma e seleziona/deseleziona Visualizza percorso rispettivamente per visualizzare/nascondere il percorso giallo del robot TCP.
Utilizza numeri Tool/Piani per Tool/Piani numerati utilizzerà il corrispondente numero di tool/piano invece che aggiornare il tool/piano nel controller robot. Ciò è disponibile per controller robot che utilizzano numeri invece che variabili. Questo comportamento può essere modificato tramite la personalizzazione del post processor.
È possibile forzare un specifico bersaglio in modo che ritorni movimenti giunti/lineari nella generazione del programma, imponendo dati giunti o cartesiani. Di default, RoboDK utilizzerà le impostazioni del bersaglio (coordinate giunti per bersagli giunti e coordinate cartesiane per bersagli cartesiani)
Di default, RoboDK creerà nuovi bersagli come bersagli cartesiani, ciò significa che se un piano di riferimento viene spostato, la posizione del robot per raggiungere il bersaglio sarà diversa. È possibile selezionare bersagli giunti per imporre bersagli assoluti che non cambiano se il piano/tool cambia.
Seleziona Salta chiamate programma che non esistono nella stazione per ignorare programmi generati.
Quando un piano di riferimento è utilizzato in un programma (utilizzando Imposta Piano di Riferimento) e quel riferimento viene poi spostato, il movimento del robot è alterato. Di default, l'istruzione imposta piano di riferimento posizionerà il piano di riferimento del robot nella sua posizione originale senza alterare il riferimento della stazione,
Limita il massimo numero di linee per programma può essere selezionato per specificare quante linee un programma può avere al massimo. Ciò dividerà programmi lunghi in sub-programmi e genererà un programma main che farà partire questi programmi minori in sequenza. I controller robot hanno una capacità limitata e possono eseguire programmi di una certa dimensione. Fatta eccezione per specifici/vecchi controllori, la maggiorparte può gestire 5000 linee per programma.
Infine, impostazioni specifche sono disponibili per specifici produttori di robot che utilizzano post-processori integrati. D'altra parte, post processori personalizzati permettono una personalizzazione o imporre certi comportamenti prima di essere generati.