Visualizza
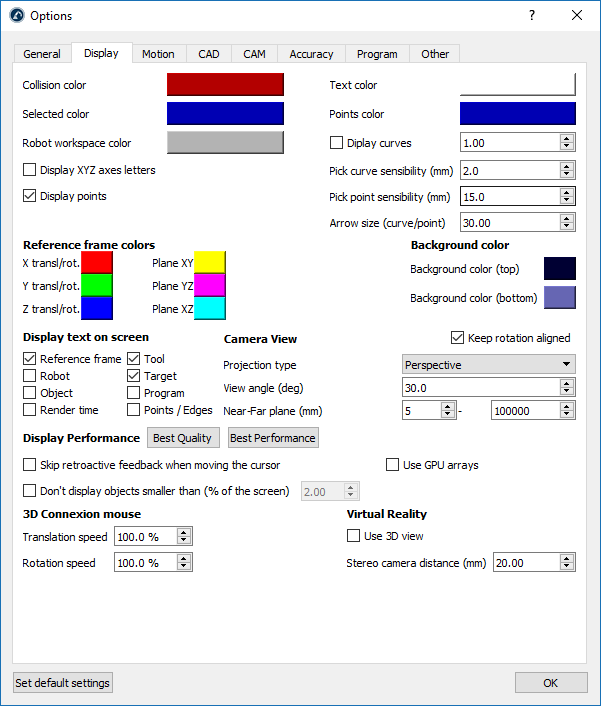
Seleziona il pulsante colorato vicino al colore Collisione, colore Selezionato, colore Testo o colore Punto per cambiare i colori di default utilizzati nello schermo principale.
Seleziona Visualizza lettere assi XYZ per visualizzare i piani di riferimento con le lettere X,Y,Z corrispondenti. Di default, non sono visualizzate e i colori standard Rosso (X), Verde (Y) e Blue (Z) sono utilizzati.
Incrementa la Sensibilità curva/punto per rendere più facile selezionare curve e punti rispettivamente. In alternativa se le curve o i punti sono troppo vicini gli uni agli altri e non è semplice selezionarli, è meglio ridurre questi valori.
La Dimensione Freccia (curva/punto) è la dimensione della freccia verde visualizzata nei progetti segui punti o curva (disponibile nel menu Utilità).
I colori del piano di riferimento possono essere aggiornati come anche il colore di sfondo (i colori del piano sono visualizzati mentre vengono spostati con il mouse).
La Vista Fotocamera è impostata su Prospettiva di default. È possibile modificarla su Ortogonale e aggiornare alcune impostazioni come l'angolo di visuale e i piani Vicino/Lontano.
Deseleziona Mantieni rotazione allineata per rotare in ogni direzione.
Di default le impostazioni sono impostate per ottenere una Qualità Migliore. Impostare le Performance Visualizzazione su Performance Migliori se RoboDK è lento perchè ci sono troppi oggetti visualizzati. Ciò forzerà l'uso della GPU senza visualizzare gli oggetti piccoli sullo schermo.
È possibile utilizzare un Mouse 3D Connexion, ad esempio SpaceNavigator e modificare la velocità di traslazione e rotazione per l'utilizzo con quel mouse.
È anche possibile visualizzare RoboDK su uno schermo 3D (utilizzare la vista 3D per la Realtà Virtuale). La distanza della Stereo camera definirà quanto vicino o lontano sembreranno gli oggetti.