Preparare la sua stazione
Per creare un progetto di pallettizzazione, deve prima impostare correttamente la sua stazione in RoboDK.
Segua questi passaggi per impostare correttamente la sua stazione:
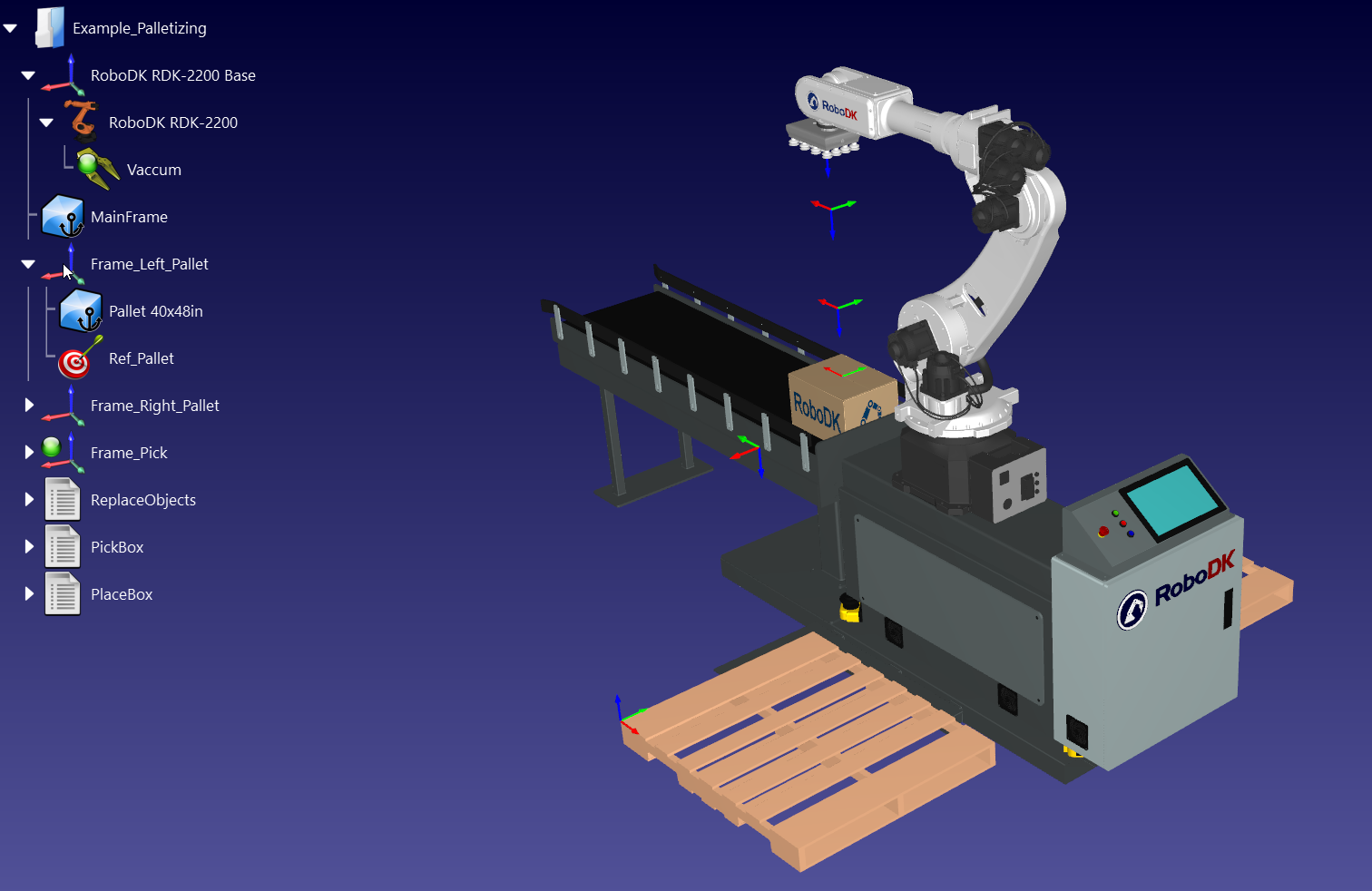
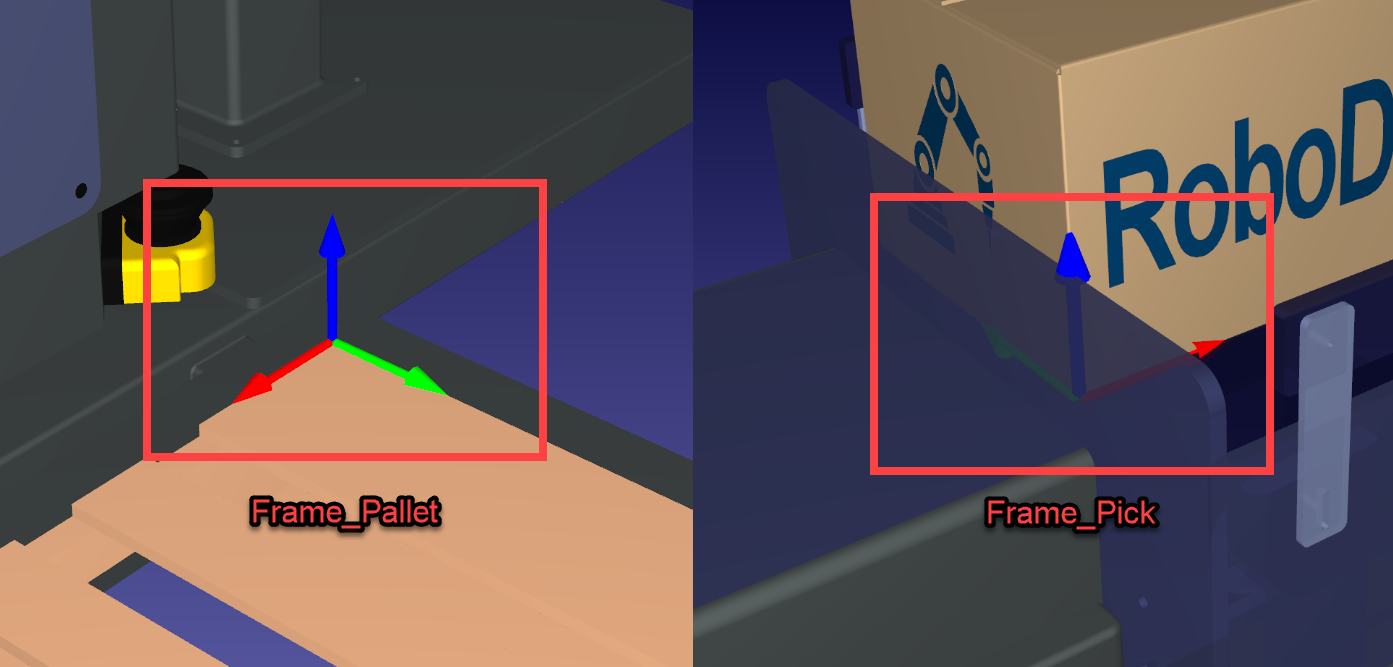
1.Deve caricare un robot, un utensile, una scatola, un quadro di riferimento in cui insegnerà ai suoi bersagli a prelevare la scatola (es.: Frame_Pick), un pallet e un piano di riferimento sull'angolo del pallet (es.: Frame_Pallet). Può anche caricare un trasportatore, se ne ha uno.
2.I piani di riferimento del pallet devono essere orientati con l'asse X+ che punta nella direzione della lunghezza del pallet.
3.I piani di riferimento del pallet devono essere orientati con l'asse Z+ normale al pallet (rivolto verso l'alto).
4.Si assicuri di associare il pallet e la scatola ai rispettivi piani di riferimento. Questo per assicurarsi che se deve spostarli, i bersagli del robot aggiorneranno automaticamente la loro posizione in tempo reale.
5.Riposizionare i diversi oggetti/quadri come necessario.
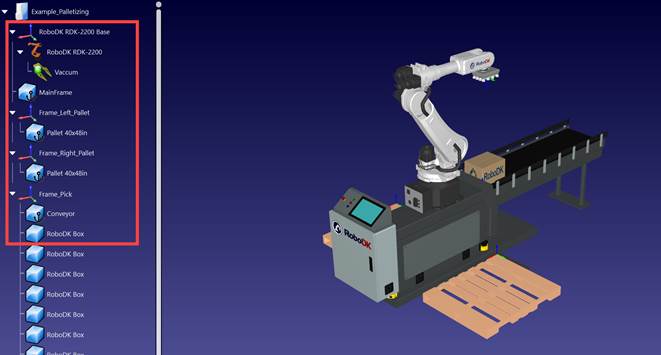
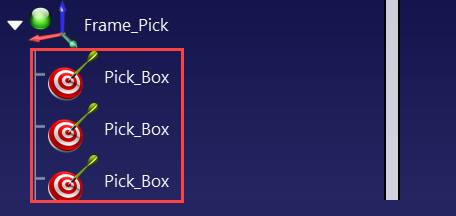
6.Cloni il riquadro più volte copiandolo e incollandolo in "Frame_Pick", in modo da poter effettuare più prelievi.
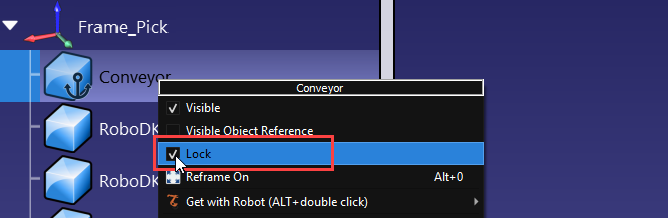
7.Si assicuri di bloccare gli oggetti 3D, ma non le scatole, nella loro cornice, facendo clic con il pulsante destro del mouse e poi "Blocca".
Creare Pick and Drop
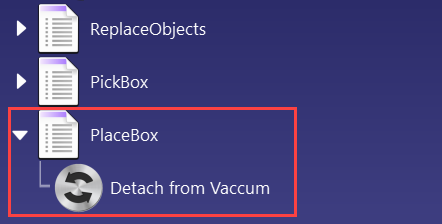
La procedura guidata di pallettizzazione richiede di fornire un sottoprogramma per scegliere una nuova scatola e un sottoprogramma per posizionare la scatola. Il programma "PlaceBox" serve solo a staccare la scatola dalla pinza e a trasferirla sul telaio del pallet; i bersagli di posizionamento effettivi saranno creati automaticamente dall'Add-in Pallettizzazione in seguito.
Segua questi passaggi per creare un programma di prelievo "PickBox" e un programma di rilascio "PlaceBox":
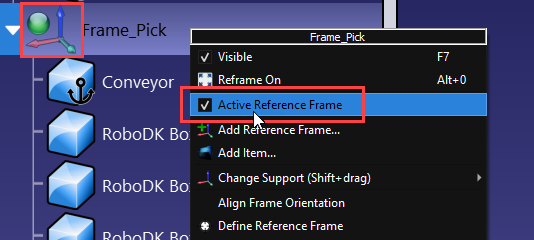
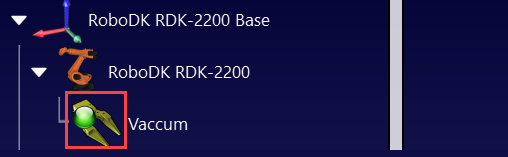
1.Innanzitutto, si assicuri di attivare il "Frame_Pick" e di avere lo strumento attivo prima di creare nuovi bersagli. Dovrebbero avere un cerchio verde se sono attivi.
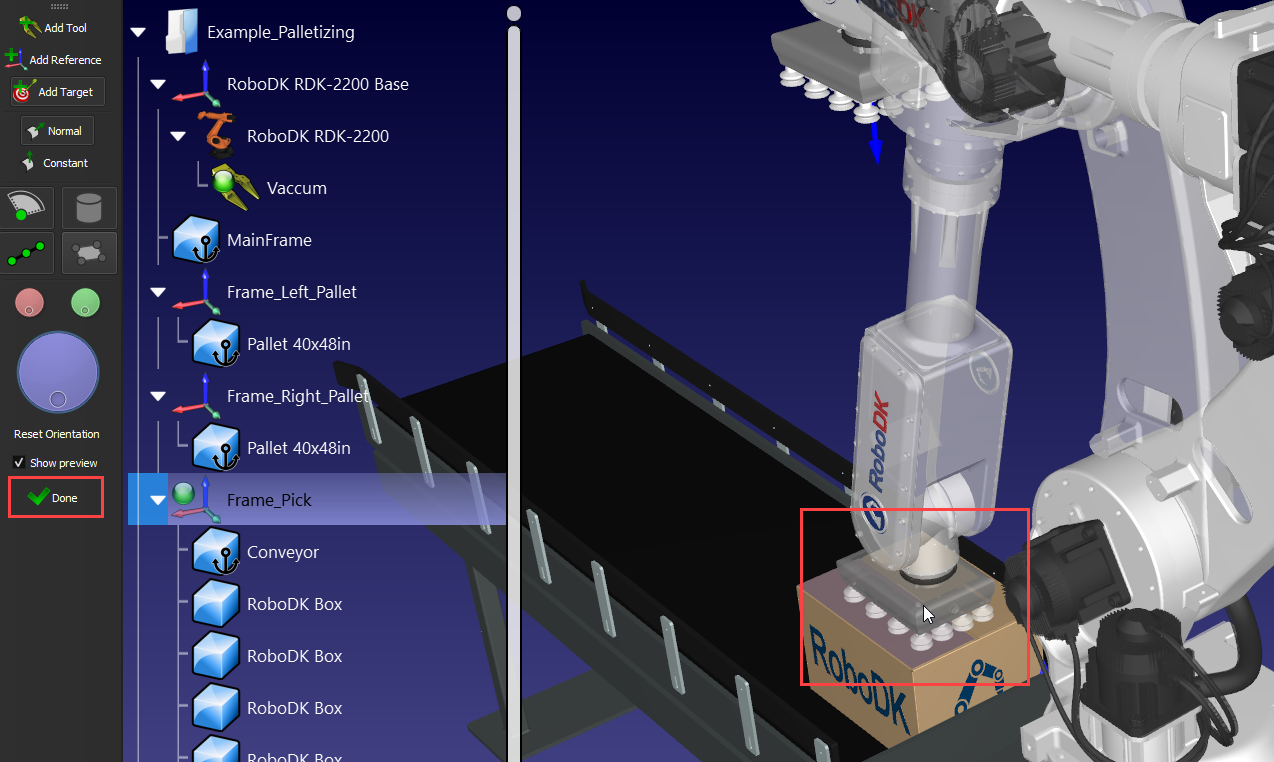
2.Nella scheda "Programma", selezioni "Insegna bersagli sulla superficie". Clicchi sulla parte superiore della casella e poi clicchi su "Fine".
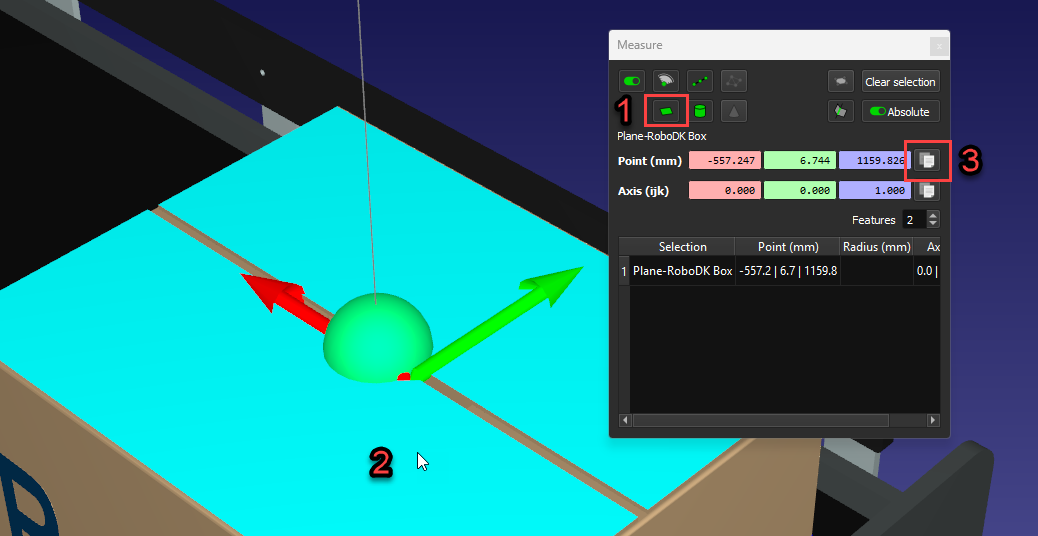
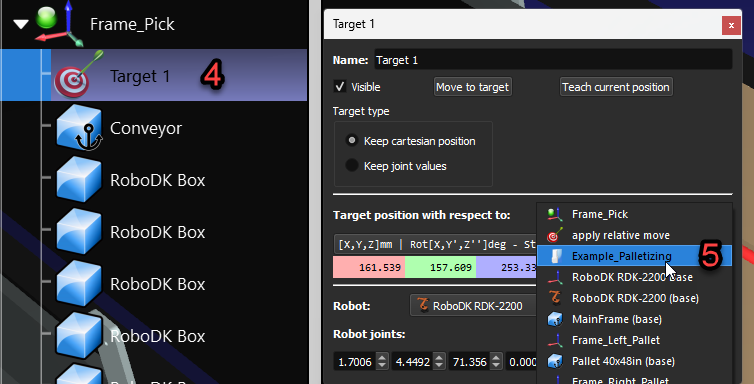
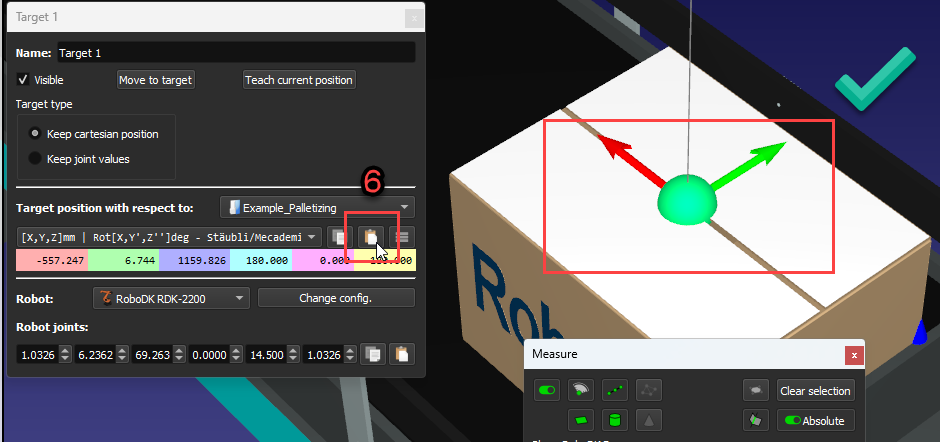
3.Ora dovrebbe avere il suo primo bersaglio nella parte inferiore di "Frame_Pick". Per assicurarsi che sia centrato rispetto alla parte superiore del riquadro, tenga premuto SHIFT+M per aprire lo strumento di misurazione, quindi faccia clic sulla parte superiore del riquadro e copi i valori. Quindi, faccia clic sul suo bersaglio, prema F3 per modificare i parametri del bersaglio. Scelga l'origine della stazione come riferimento e incolli i valori. Il bersaglio dovrebbe ora trovarsi al centro del riquadro.
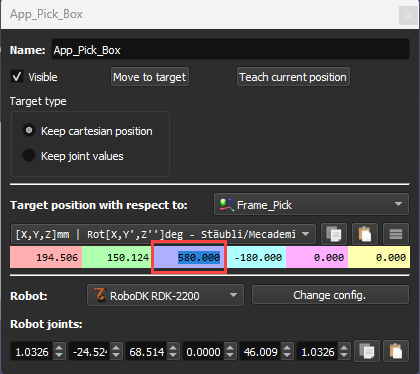
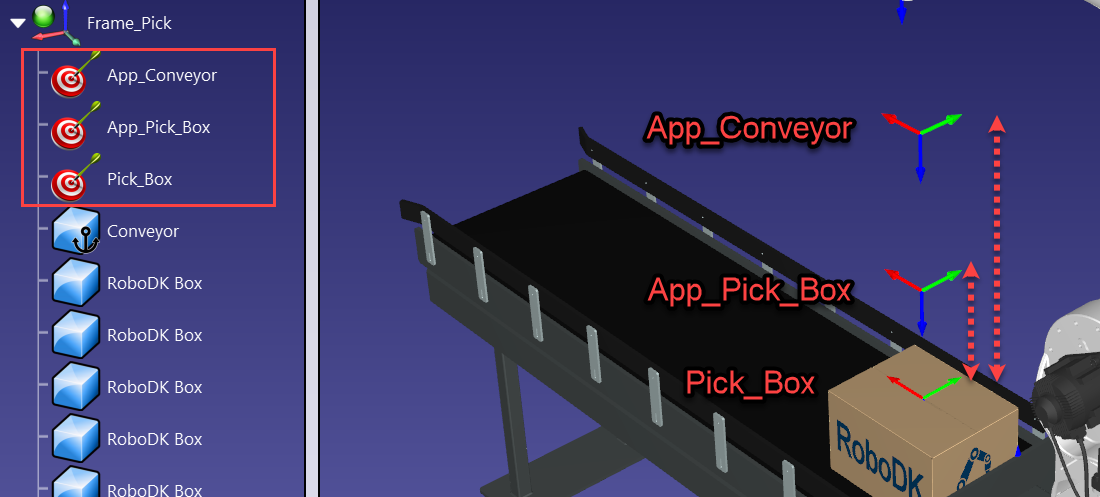
4.Rinomini il suo bersaglio "Pick_Box" e poi lo copi/incolli due volte nel "Frame_Pick". Li rinomini "App_Pick_Box" e "App_Conveyor". Quindi, modifichi i parametri del bersaglio e aggiunga un po' di distanza sui valori Z utilizzando la rotella di scorrimento fino a quando non sarà soddisfatto delle posizioni del bersaglio.
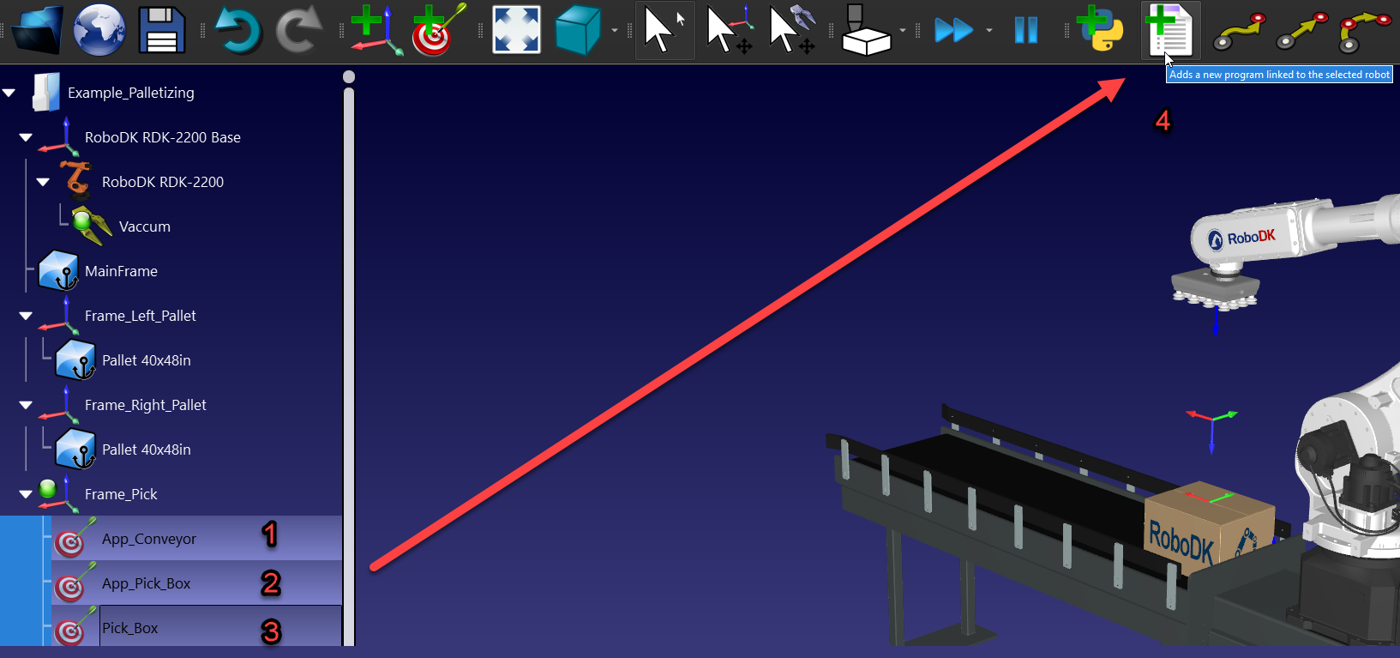
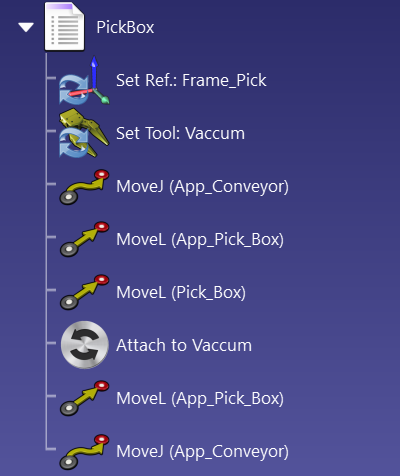
5.Tenendo premuto CTRL, faccia clic su tutti e 3 i bersagli nell'ordine in cui desidera che il programma li esegua e faccia clic su "Crea programma". Questo dovrebbe aggiungere automaticamente i bersagli, lo strumento e il quadro di riferimento al programma. Rinomini il programma "PickBox".
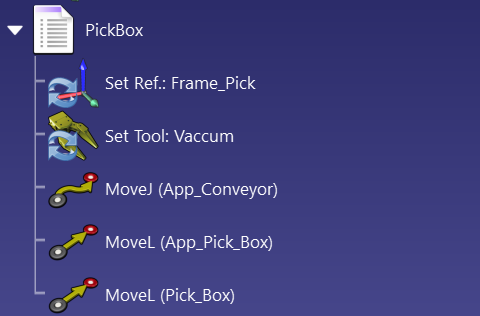
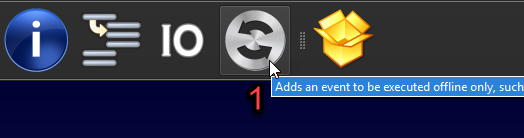
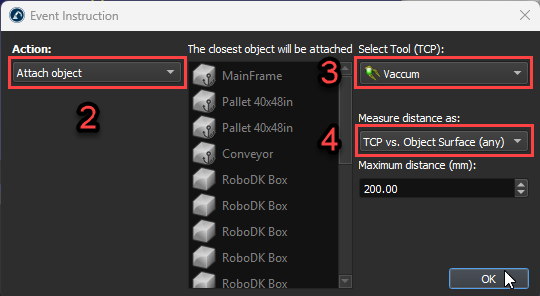
6.Aggiunga un "Evento", selezioni "Allega oggetto", si assicuri che sia selezionato lo strumento giusto e scelga "TCP vs. Superficie oggetto (qualsiasi)" nelle opzioni di misurazione della distanza. Questo collegherà la scatola allo strumento. Copi e incolli i bersagli "App_Pick_Box" e "App_Conveyor" seguendo l'evento allegato. Ora dovrebbe avere un programma di prelievo funzionante
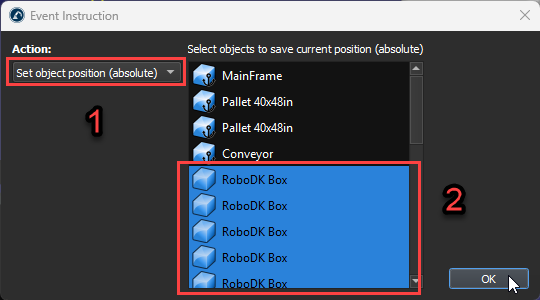
7.Crei un programma vuoto, aggiunga un evento, selezioni "Imposta posizione oggetto (assoluta)" e selezioni tutti i suoi box. Questo programma sposterà i riquadri nella loro posizione originale, in modo da poter reimpostare la sua stazione con un solo clic. Rinomini il programma "SostituisciOggetti".
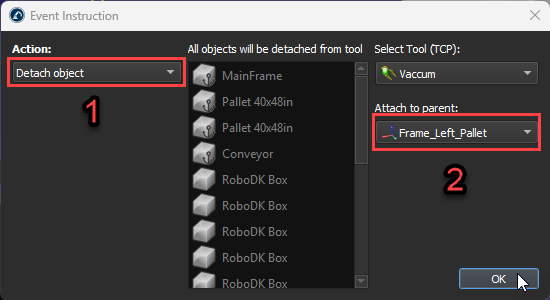
8.Crei un altro progetto vuoto, aggiunga un evento, selezioni "Stacca oggetto" e selezioni il piano di riferimento a cui vuole che la scatola sia collegata dopo il posizionamento; nel nostro caso, sarà "Telaio_Sinistra_Pallet". Rinomini il programma "PlaceBox".
9.Infine, l'ultimo requisito mancante è un bersaglio che verrà utilizzato come riferimento di configurazione. Attivi il piano di riferimento del pallet, sposti il robot su di esso, si assicuri che la configurazione del robot abbia senso e poi crei un bersaglio. Lo rinomini "Ref_Pallet".
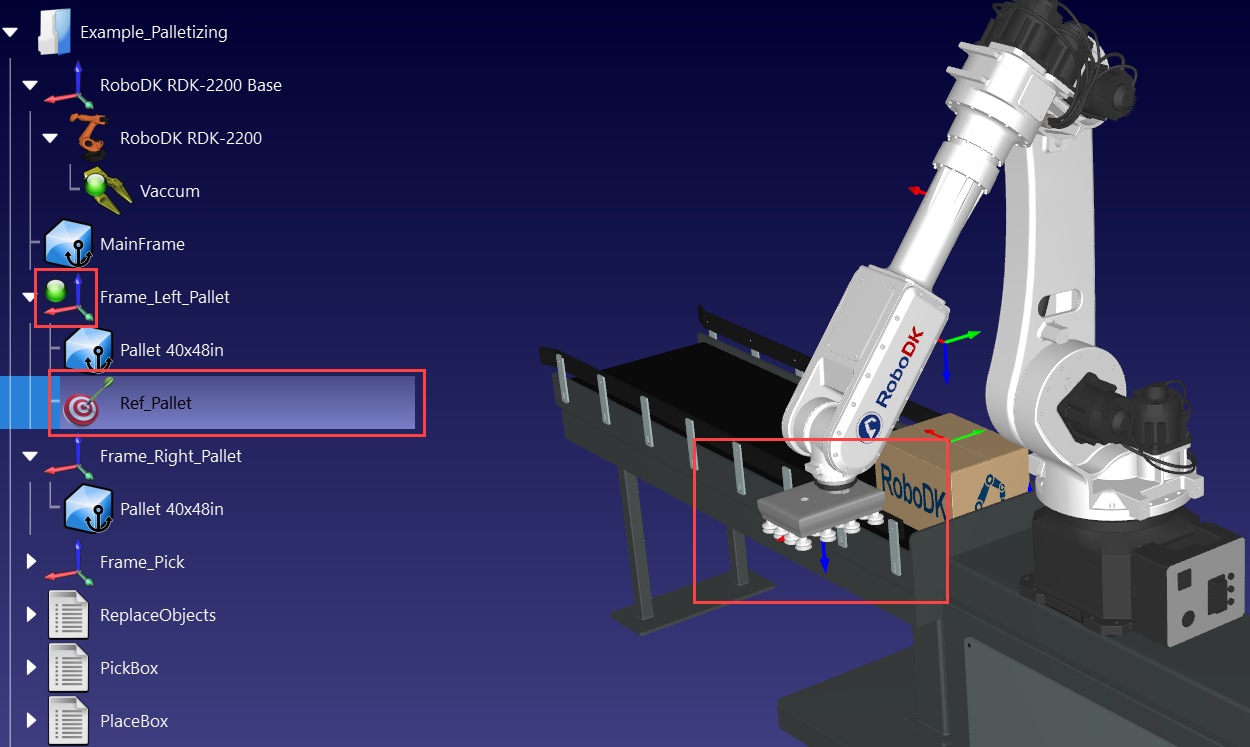
Ora ha tutto pronto per creare il suo progetto di pallettizzazione. La sua stazione dovrebbe avere questo aspetto: