Palletizing
Add-in di pallettizzazione
Può realizzare la pallettizzazione automatizzata utilizzando il plugin di pallettizzazione. Il plugin per la pallettizzazione la aiuterà a creare rapidamente un programma di pallettizzazione utilizzando un'interfaccia visiva e intuitiva.
Questo esempio la guiderà attraverso i passi necessari per passare da un progetto RoboDK vuoto a una simulazione di pallettizzazione che può esportare in un programma robotico reale che può essere caricato ed eseguito su un controller robot.
Scarichi e attivi l'Add-in per la pallettizzazione
Può trovare l'ultima versione dell'Add-in Pallettizzazione nel Marketplace Add-in. Per maggiori informazioni su come installare e attivare gli Add-in, visiti la sezione Add-in Manager.
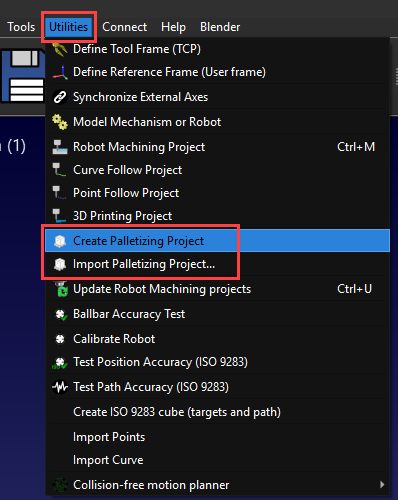
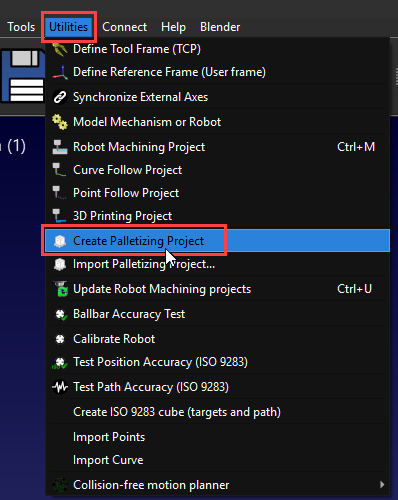
Per assicurarsi che l'installazione e l'attivazione siano andate a buon fine, si rechi in Utilità e dovrebbe vedere le nuove opzioni seguenti: "Crea progetto di pallettizzazione" e "Importa progetto di pallettizzazione...".
Preparare la sua stazione
Per creare un progetto di pallettizzazione, deve prima impostare correttamente la sua stazione in RoboDK.
Segua questi passaggi per impostare correttamente la sua stazione:
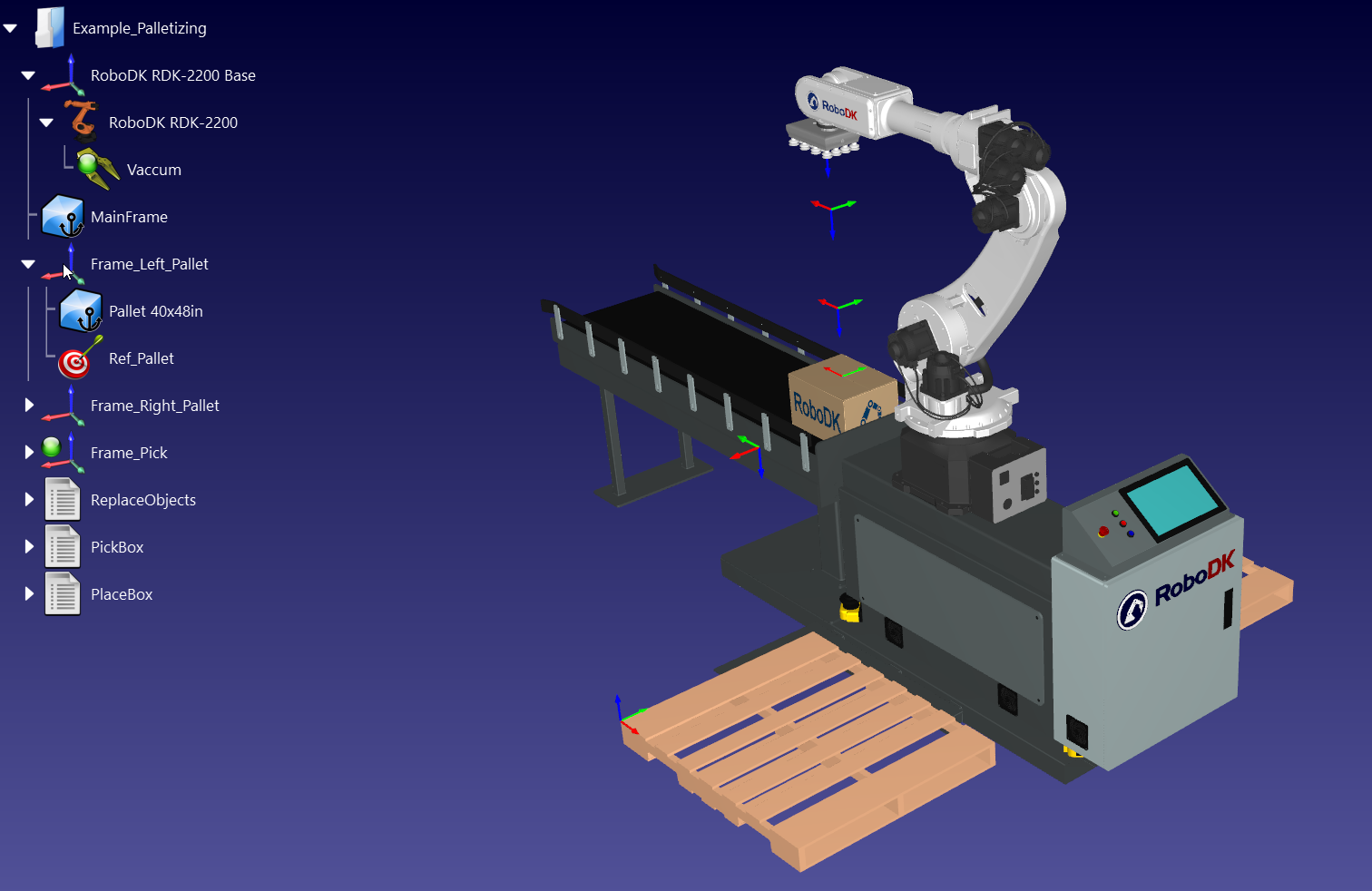
1.Deve caricare un robot, un utensile, una scatola, un quadro di riferimento in cui insegnerà ai suoi bersagli a prelevare la scatola (es.: Frame_Pick), un pallet e un piano di riferimento sull'angolo del pallet (es.: Frame_Pallet). Può anche caricare un trasportatore, se ne ha uno.
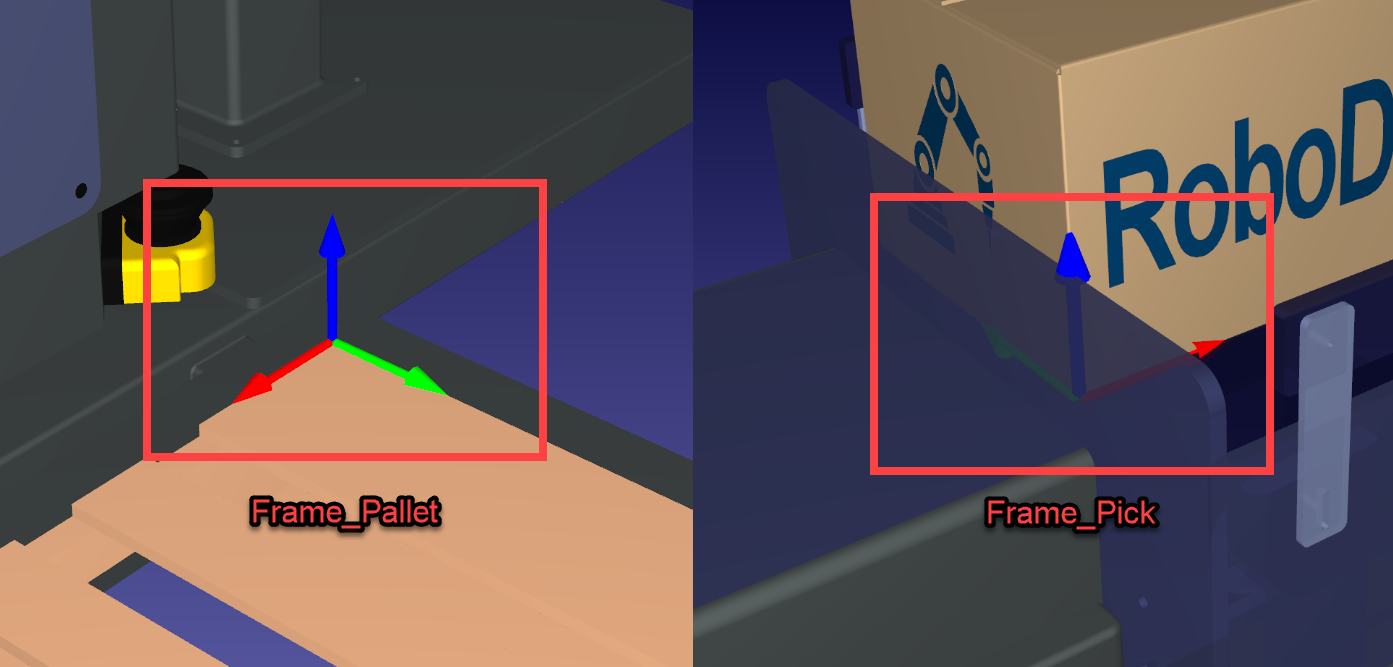
2.I piani di riferimento del pallet devono essere orientati con l'asse X+ che punta nella direzione della lunghezza del pallet.
3.I piani di riferimento del pallet devono essere orientati con l'asse Z+ normale al pallet (rivolto verso l'alto).
4.Si assicuri di associare il pallet e la scatola ai rispettivi piani di riferimento. Questo per assicurarsi che se deve spostarli, i bersagli del robot aggiorneranno automaticamente la loro posizione in tempo reale.
5.Riposizionare i diversi oggetti/quadri come necessario.
6.Cloni il riquadro più volte copiandolo e incollandolo in "Frame_Pick", in modo da poter effettuare più prelievi.
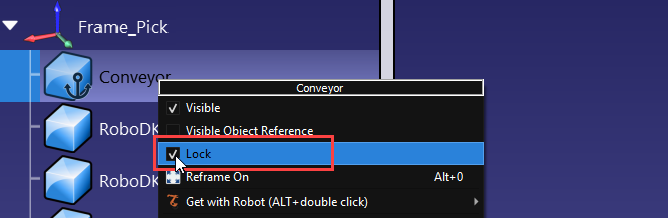
7.Si assicuri di bloccare gli oggetti 3D, ma non le scatole, nella loro cornice, facendo clic con il pulsante destro del mouse e poi "Blocca".
Creare Pick and Drop
La procedura guidata di pallettizzazione richiede di fornire un sottoprogramma per scegliere una nuova scatola e un sottoprogramma per posizionare la scatola. Il programma "PlaceBox" serve solo a staccare la scatola dalla pinza e a trasferirla sul telaio del pallet; i bersagli di posizionamento effettivi saranno creati automaticamente dall'Add-in Pallettizzazione in seguito.
Segua questi passaggi per creare un programma di prelievo "PickBox" e un programma di rilascio "PlaceBox":
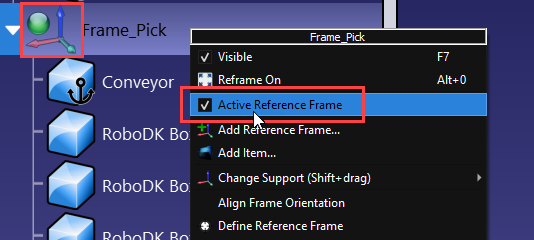
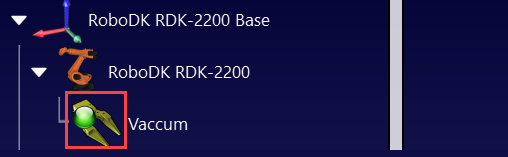
1.Innanzitutto, si assicuri di attivare il "Frame_Pick" e di avere lo strumento attivo prima di creare nuovi bersagli. Dovrebbero avere un cerchio verde se sono attivi.
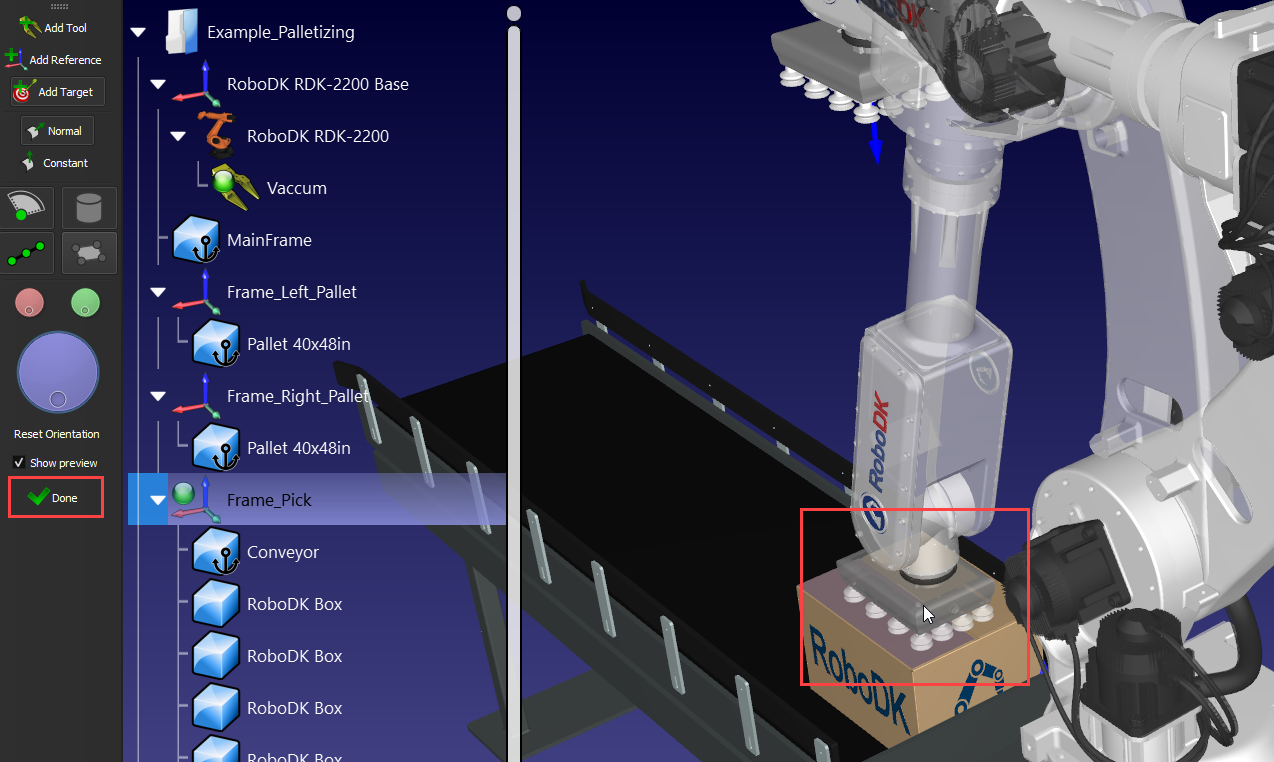
2.Nella scheda "Programma", selezioni "Insegna bersagli sulla superficie". Clicchi sulla parte superiore della casella e poi clicchi su "Fine".
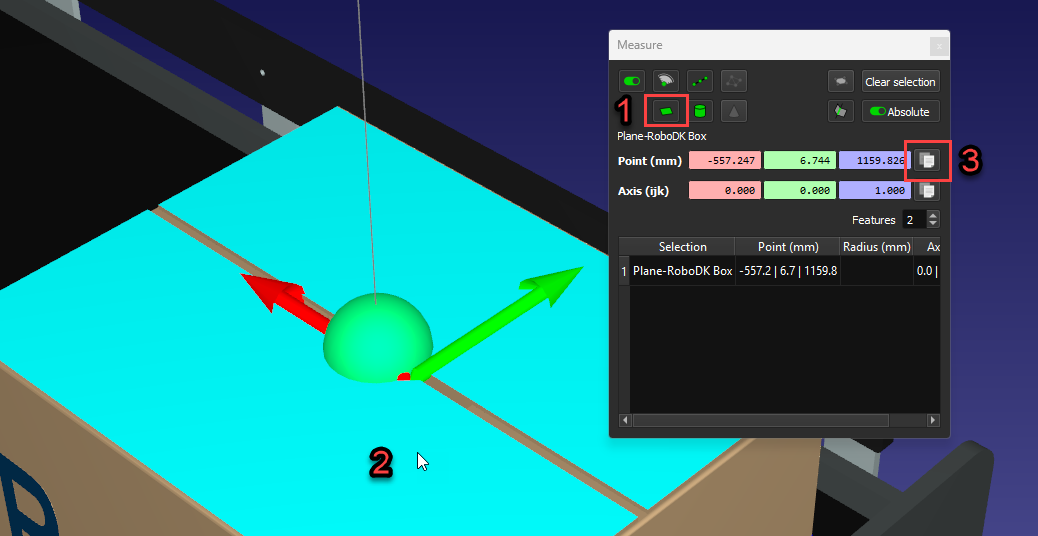
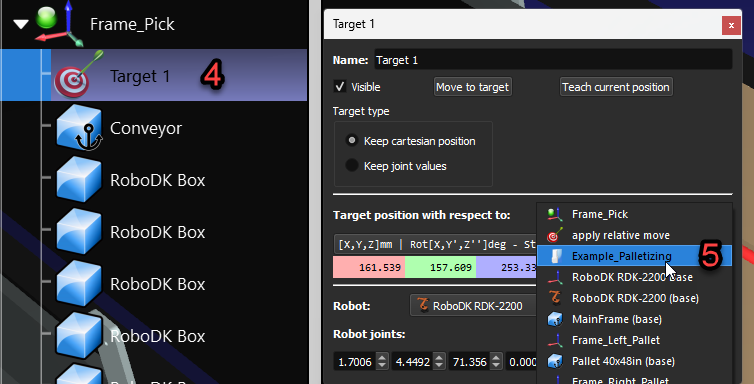
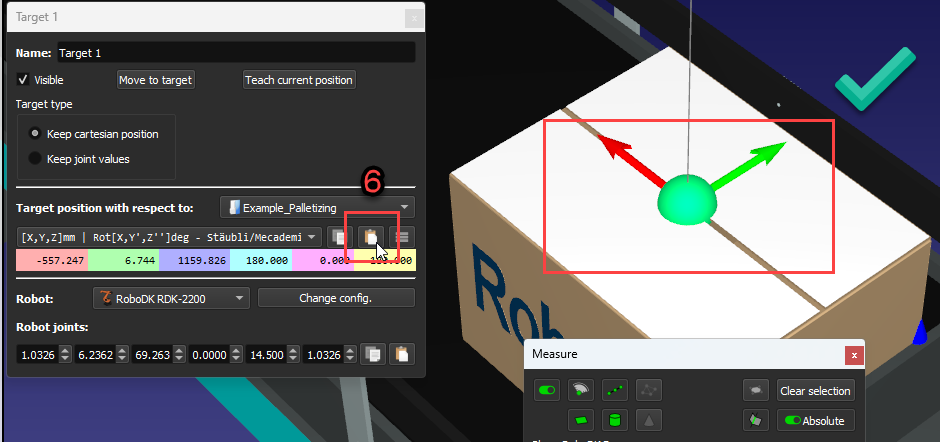
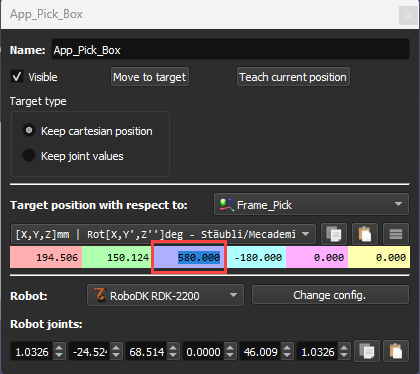
3.Ora dovrebbe avere il suo primo bersaglio nella parte inferiore di "Frame_Pick". Per assicurarsi che sia centrato rispetto alla parte superiore del riquadro, tenga premuto SHIFT+M per aprire lo strumento di misurazione, quindi faccia clic sulla parte superiore del riquadro e copi i valori. Quindi, faccia clic sul suo bersaglio, prema F3 per modificare i parametri del bersaglio. Scelga l'origine della stazione come riferimento e incolli i valori. Il bersaglio dovrebbe ora trovarsi al centro del riquadro.
4.Rinomini il suo bersaglio "Pick_Box" e poi lo copi/incolli due volte nel "Frame_Pick". Li rinomini "App_Pick_Box" e "App_Conveyor". Quindi, modifichi i parametri del bersaglio e aggiunga un po' di distanza sui valori Z utilizzando la rotella di scorrimento fino a quando non sarà soddisfatto delle posizioni del bersaglio.
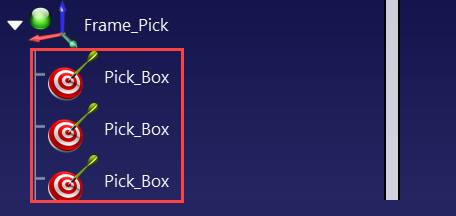
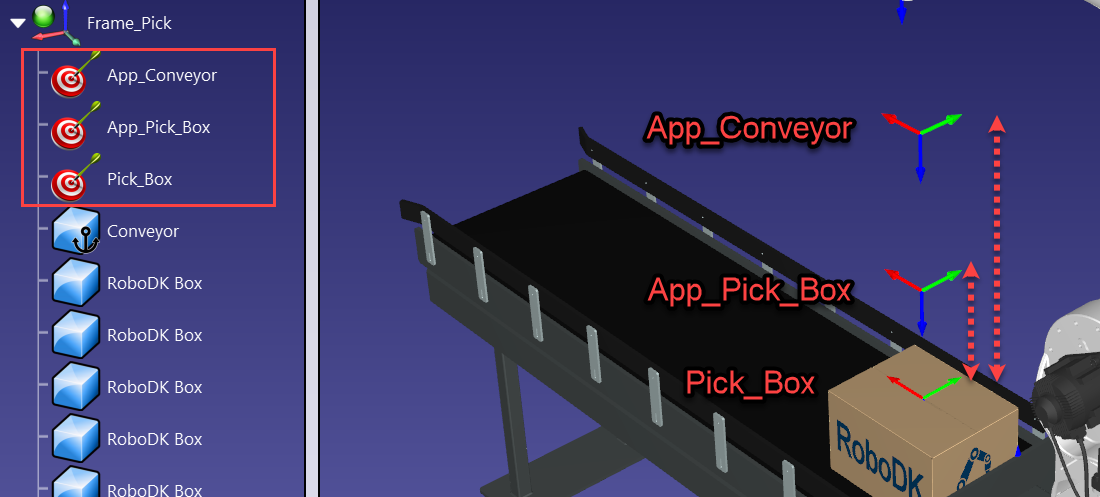
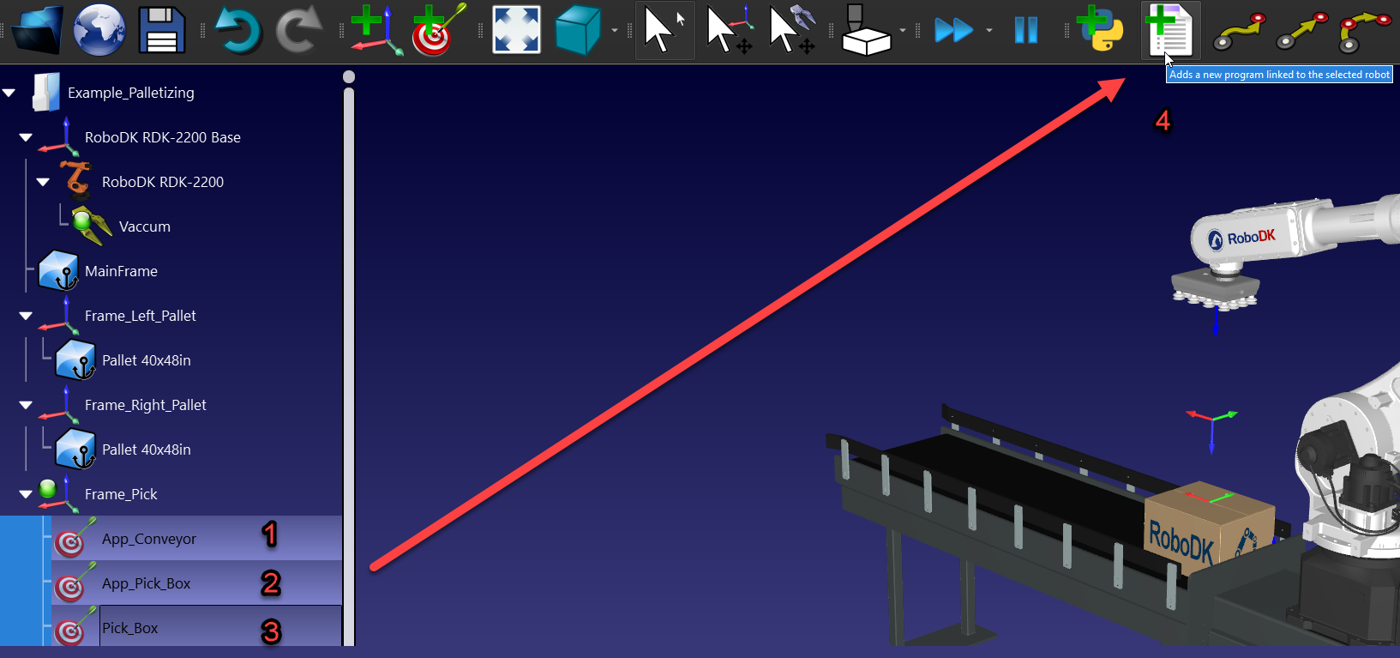
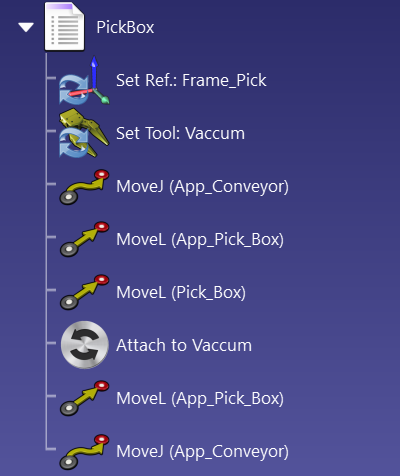
5.Tenendo premuto CTRL, faccia clic su tutti e 3 i bersagli nell'ordine in cui desidera che il programma li esegua e faccia clic su "Crea programma". Questo dovrebbe aggiungere automaticamente i bersagli, lo strumento e il quadro di riferimento al programma. Rinomini il programma "PickBox".
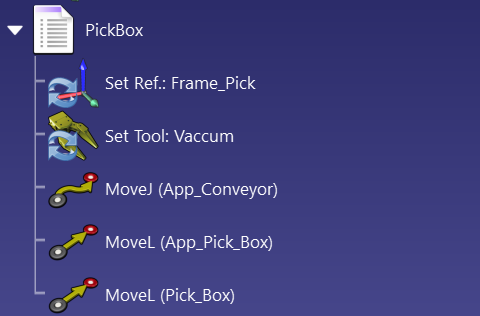
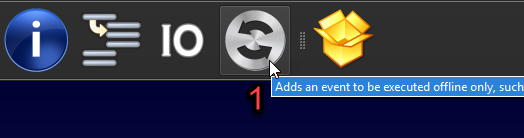
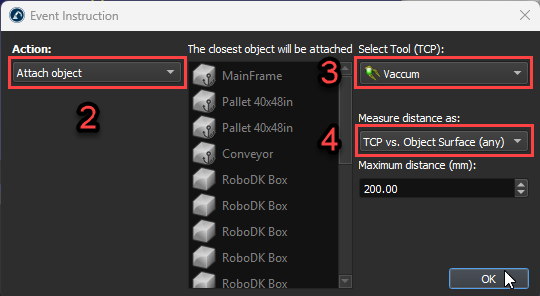
6.Aggiunga un "Evento", selezioni "Allega oggetto", si assicuri che sia selezionato lo strumento giusto e scelga "TCP vs. Superficie oggetto (qualsiasi)" nelle opzioni di misurazione della distanza. Questo collegherà la scatola allo strumento. Copi e incolli i bersagli "App_Pick_Box" e "App_Conveyor" seguendo l'evento allegato. Ora dovrebbe avere un programma di prelievo funzionante
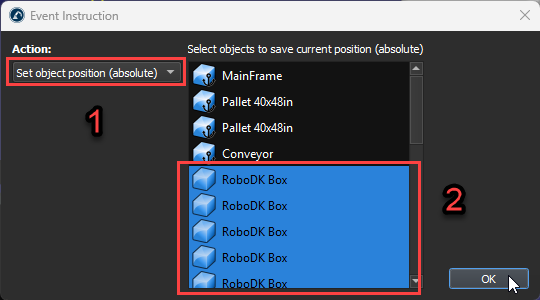
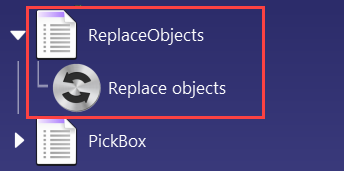
7.Crei un programma vuoto, aggiunga un evento, selezioni "Imposta posizione oggetto (assoluta)" e selezioni tutti i suoi box. Questo programma sposterà i riquadri nella loro posizione originale, in modo da poter reimpostare la sua stazione con un solo clic. Rinomini il programma "SostituisciOggetti".
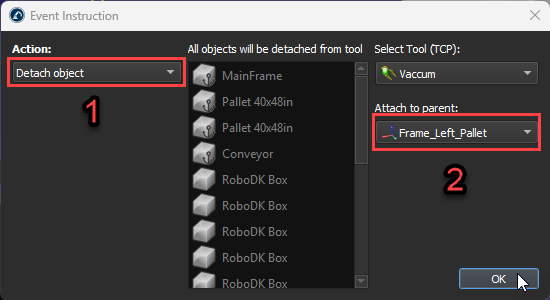
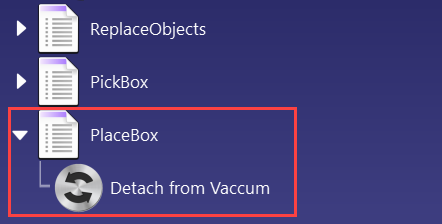
8.Crei un altro progetto vuoto, aggiunga un evento, selezioni "Stacca oggetto" e selezioni il piano di riferimento a cui vuole che la scatola sia collegata dopo il posizionamento; nel nostro caso, sarà "Telaio_Sinistra_Pallet". Rinomini il programma "PlaceBox".
9.Infine, l'ultimo requisito mancante è un bersaglio che verrà utilizzato come riferimento di configurazione. Attivi il piano di riferimento del pallet, sposti il robot su di esso, si assicuri che la configurazione del robot abbia senso e poi crei un bersaglio. Lo rinomini "Ref_Pallet".
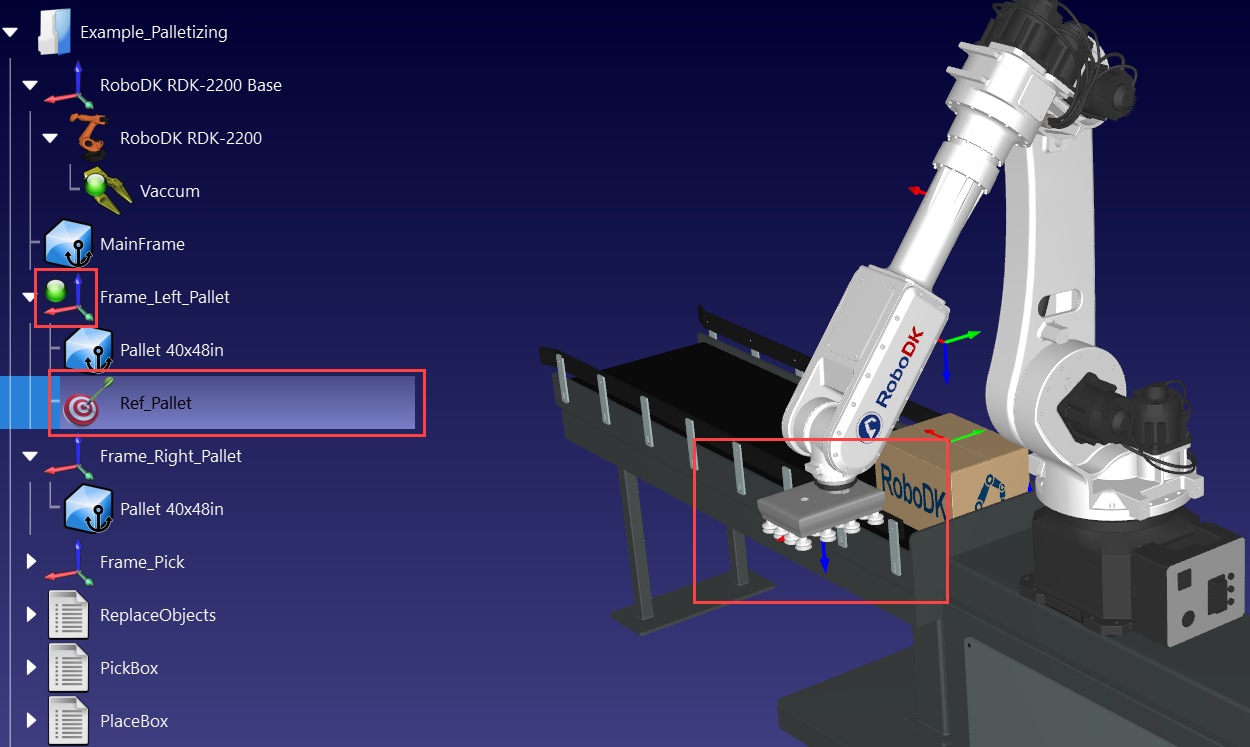
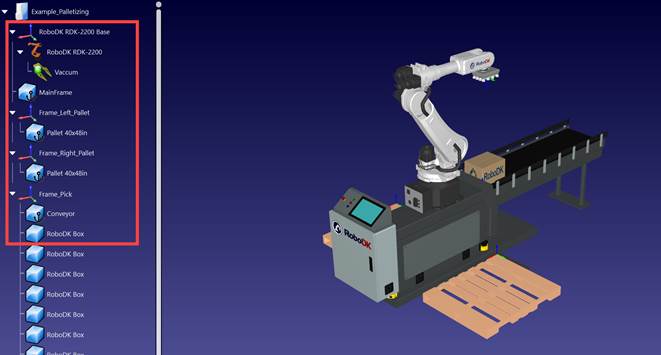
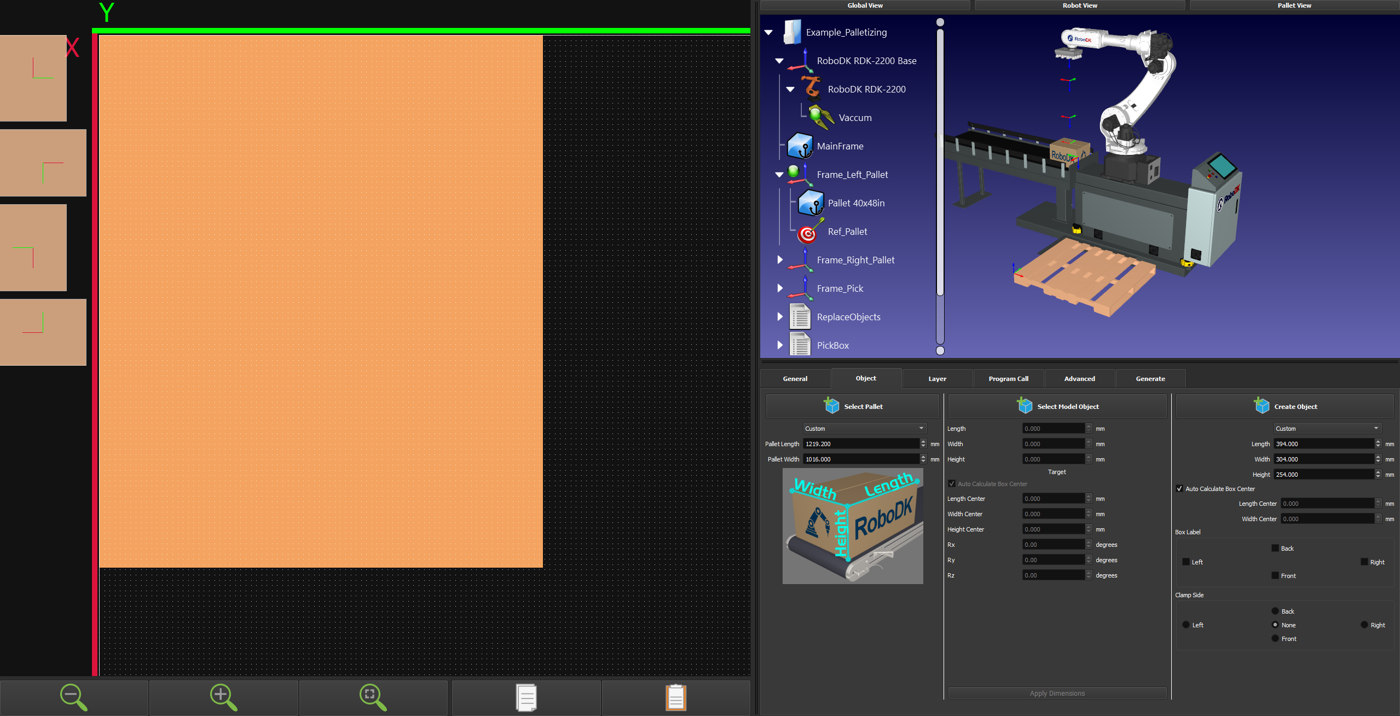
Ora ha tutto pronto per creare il suo progetto di pallettizzazione. La sua stazione dovrebbe avere questo aspetto:
Creare un progetto di pallettizzazione
Il progetto di pallettizzazione la aiuterà ad automatizzare il processo di pallettizzazione del robot. Questa sezione descrive le caratteristiche principali delle impostazioni di pallettizzazione che può personalizzare.
Segua questi passaggi per creare un progetto di pallettizzazione:
1.Si rechi in Utilità e selezioni "Crea progetto di pallettizzazione".
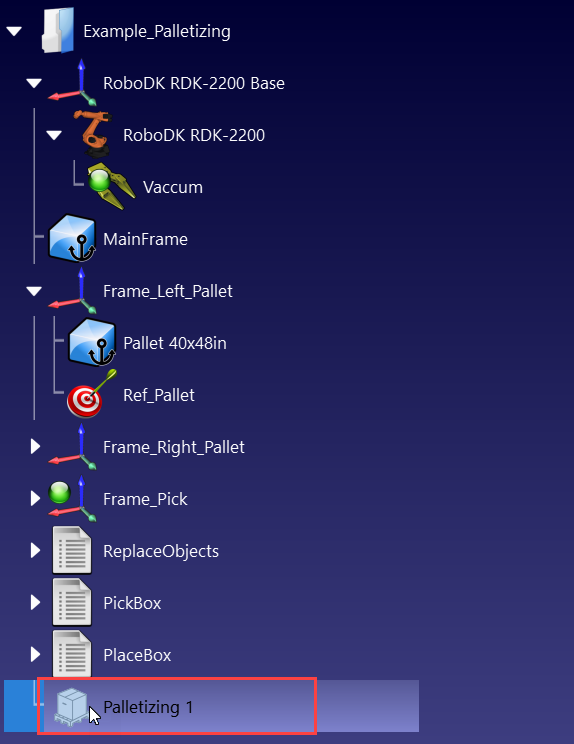
2.Faccia doppio clic su "Pallettizzazione 1" nell'albero delle stazioni.
Configuri il suo progetto di pallettizzazione
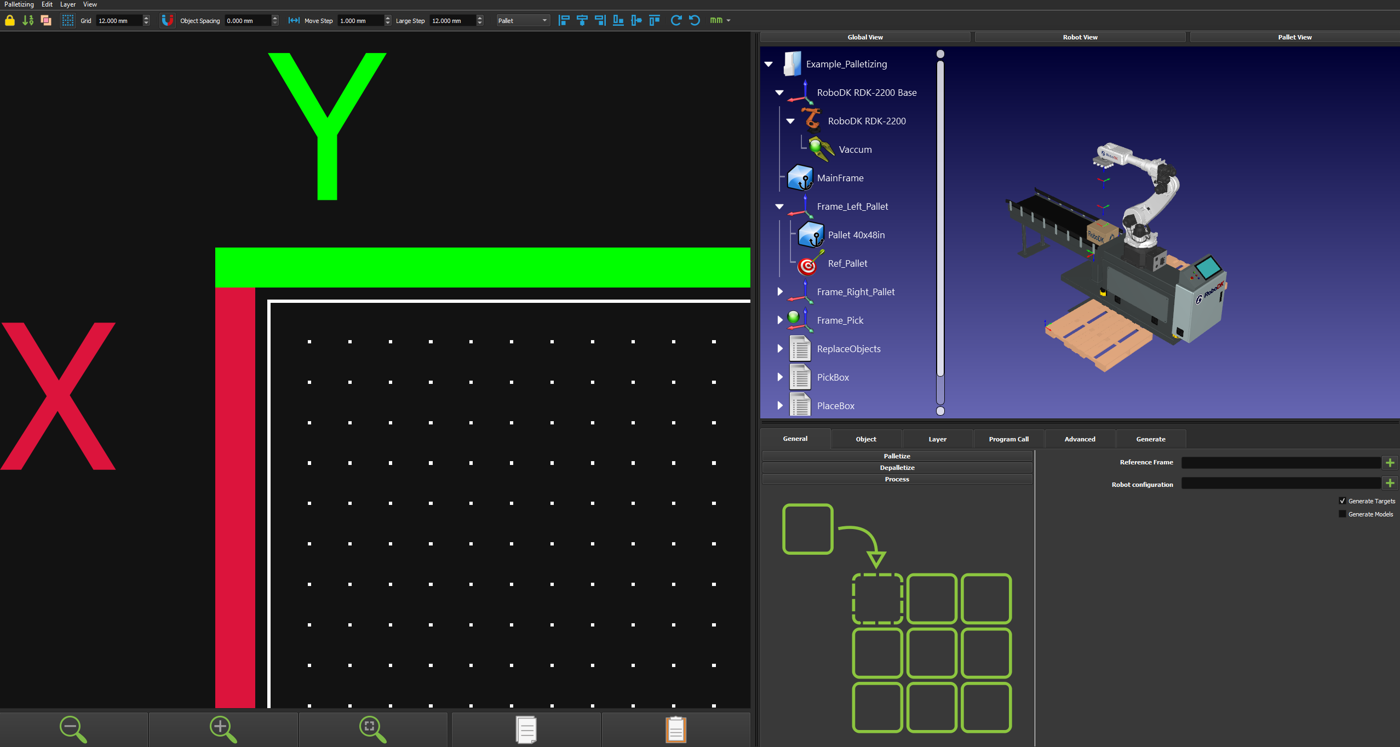
Quando apre l'interfaccia principale del menu di pallettizzazione, può scegliere tra pallettizzazione, depallettizzazione o impostazione del processo (che comprende entrambi).
Segua questi passaggi per impostare il suo progetto di pallettizzazione:
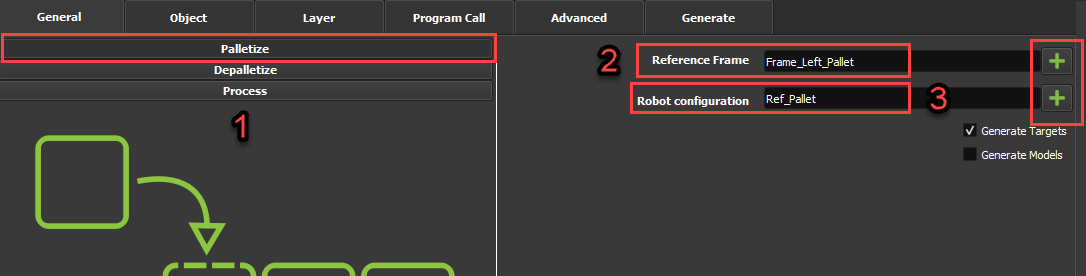
1.Selezioni l'opzione "Pallettizzare", clicchi sul pulsante "+" di "Telaio di riferimento" e selezioni il suo telaio di riferimento del pallet. Quindi, faccia clic sul pulsante "+" di "Configurazione robot" e scelga il bersaglio "Ref_Pallet" che abbiamo creato in precedenza.
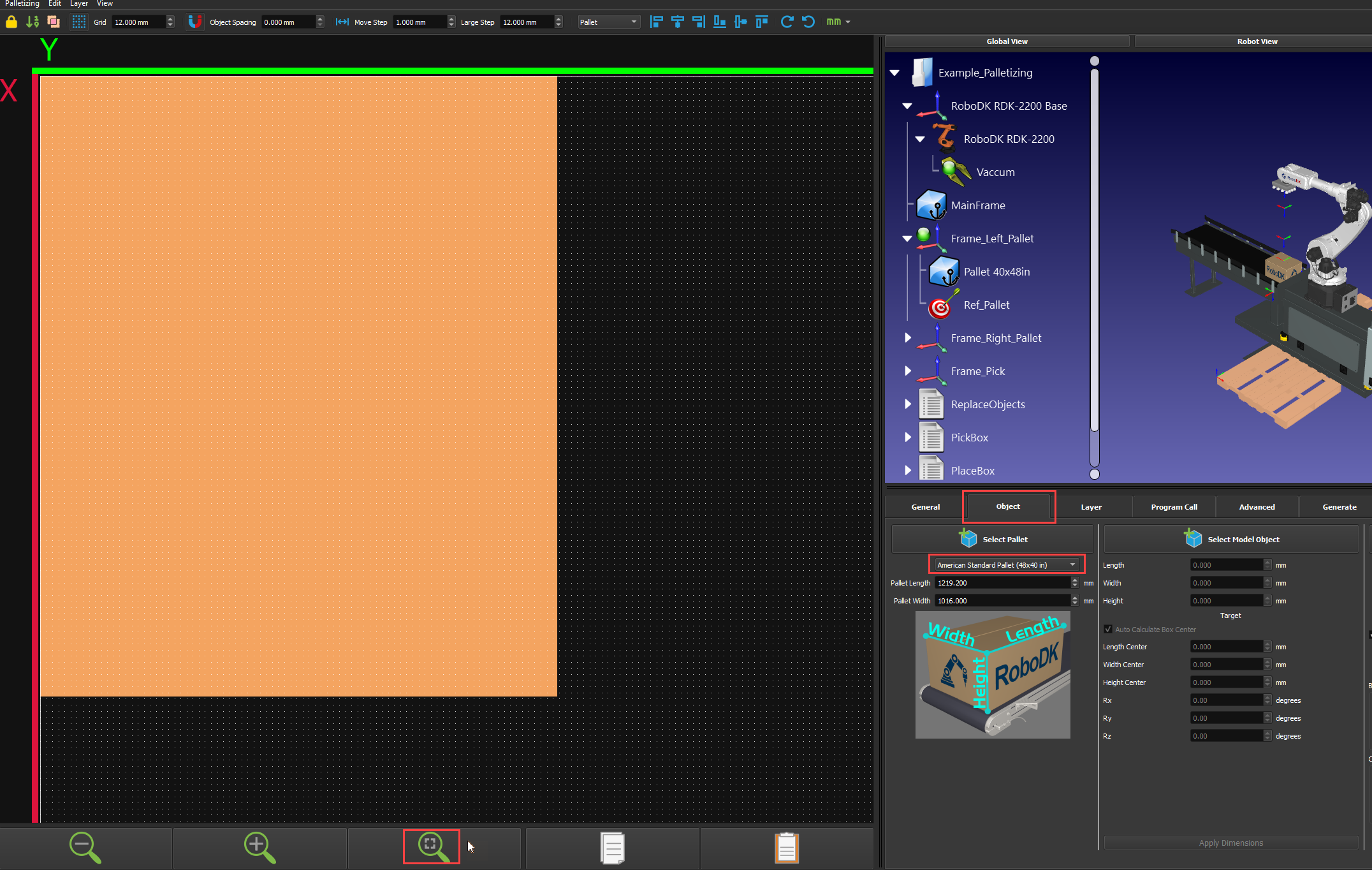
2.Selezioni la scheda Oggetto per impostare le dimensioni del pallet e della scatola.
3.Selezioni una delle preimpostazioni per le dimensioni del suo pallet o inserisca le dimensioni manualmente. Poi clicchi sull'icona "Zoom per adattarsi", in modo che il pallet 2D possa essere visualizzato correttamente nella sua interezza.
4.Selezioni uno dei preset per la sua scatola o inserisca manualmente le sue dimensioni e clicchi su "Crea oggetto"
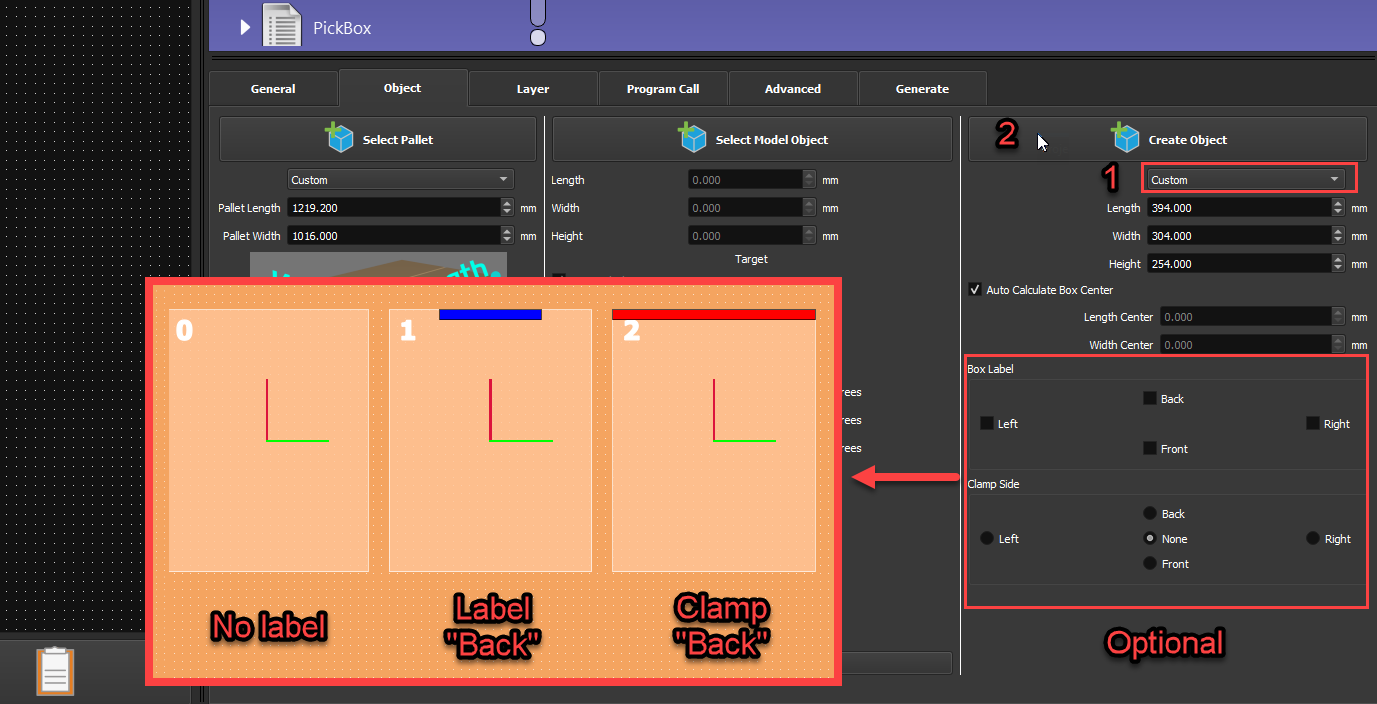
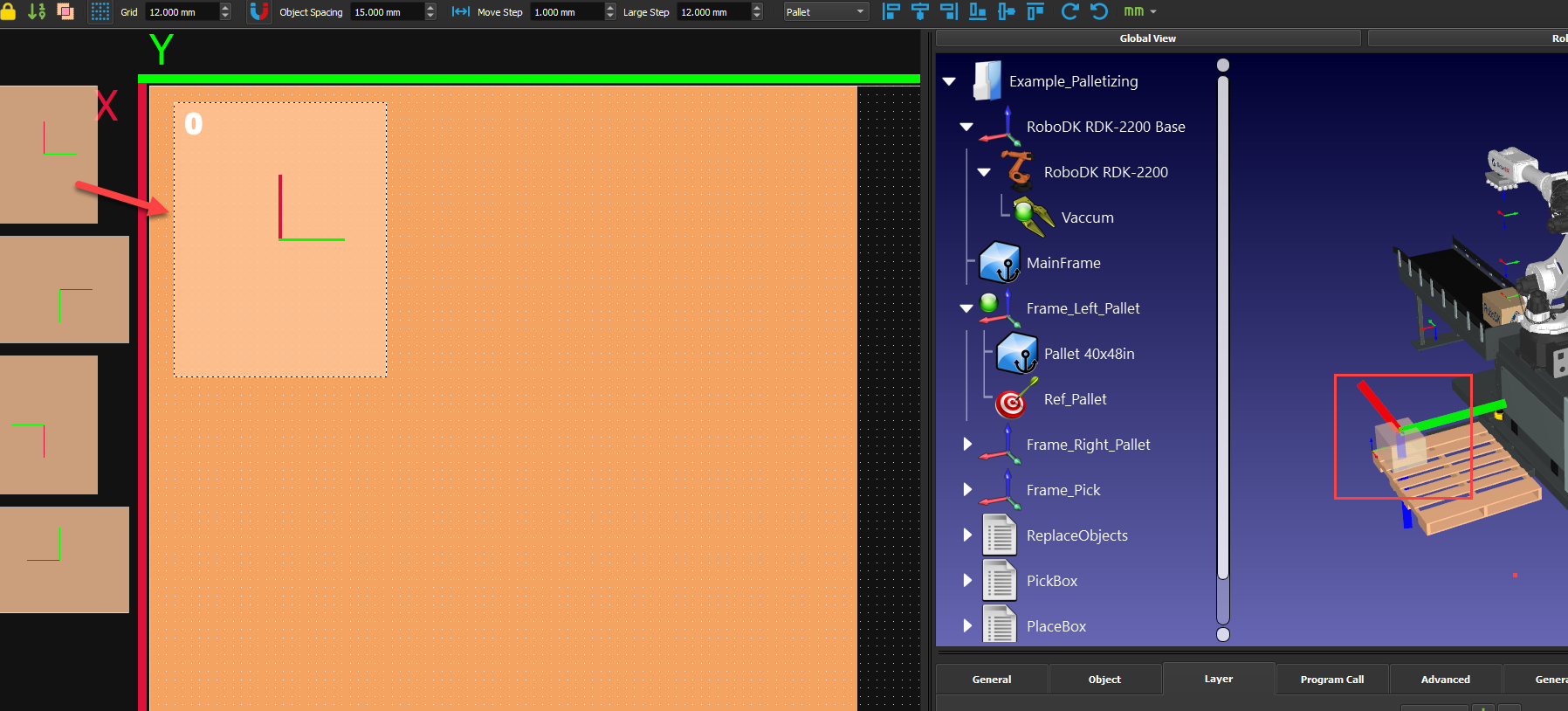
5.Una volta cliccato su Crea oggetto, appariranno 4 caselle sul lato sinistro dello schermo. Una casella per ogni possibile rotazione di 90 gradi. Una linea rossa e una verde mostreranno la rotazione del TCP intorno all'asse Z.
Creare un design a strati
I livelli di pallettizzazione le consentono di progettare il modo in cui desidera posizionare gli oggetti su ogni strato del pallet e di definire correttamente il suo layout preferito.
Segua questi passaggi per creare il layout del suo livello:
1.Si sposti alla scheda Livello per creare il suo design di livello.
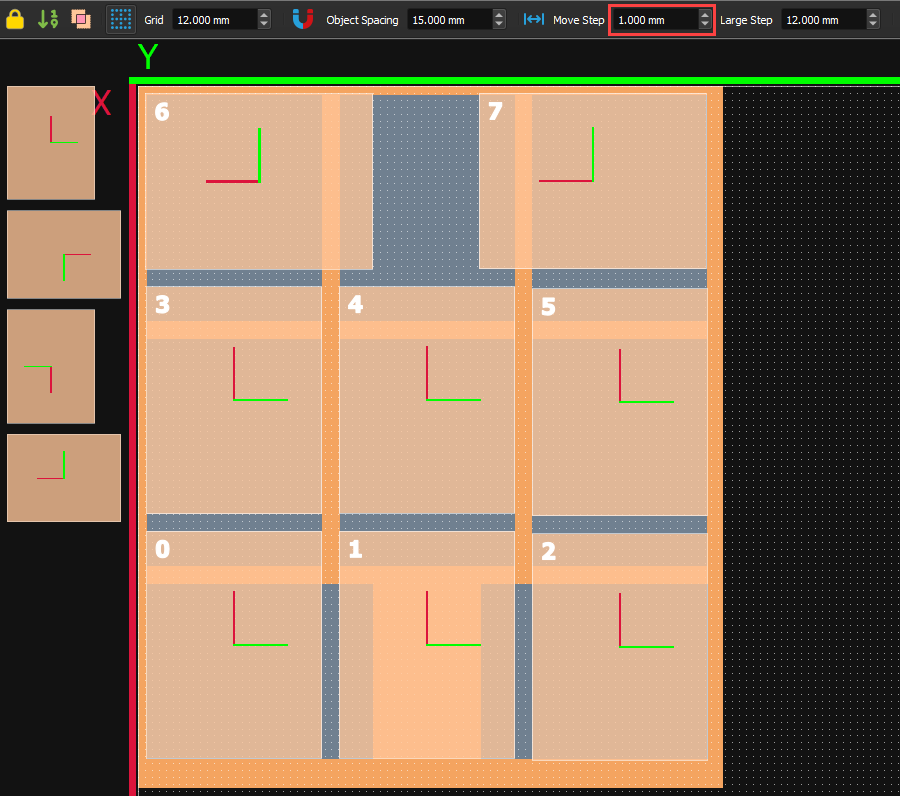
2.Si assicuri che la griglia del layout sia impostata secondo le sue esigenze. In questo caso, utilizzeremo 12 mm. Può anche modificare il valore in "Spaziatura oggetti" per avere uno spazio costante tra le sue caselle; noi utilizzeremo 15 mm.

3.Selezioni una casella dalla sinistra e la trascini sul pallet.
4.Mentre sposta il riquadro sull'interfaccia 2D, questo apparirà nell'ambiente 3D. Se la casella nell'ambiente 3D diventa rossa, significa che è fuori dalla portata del robot.
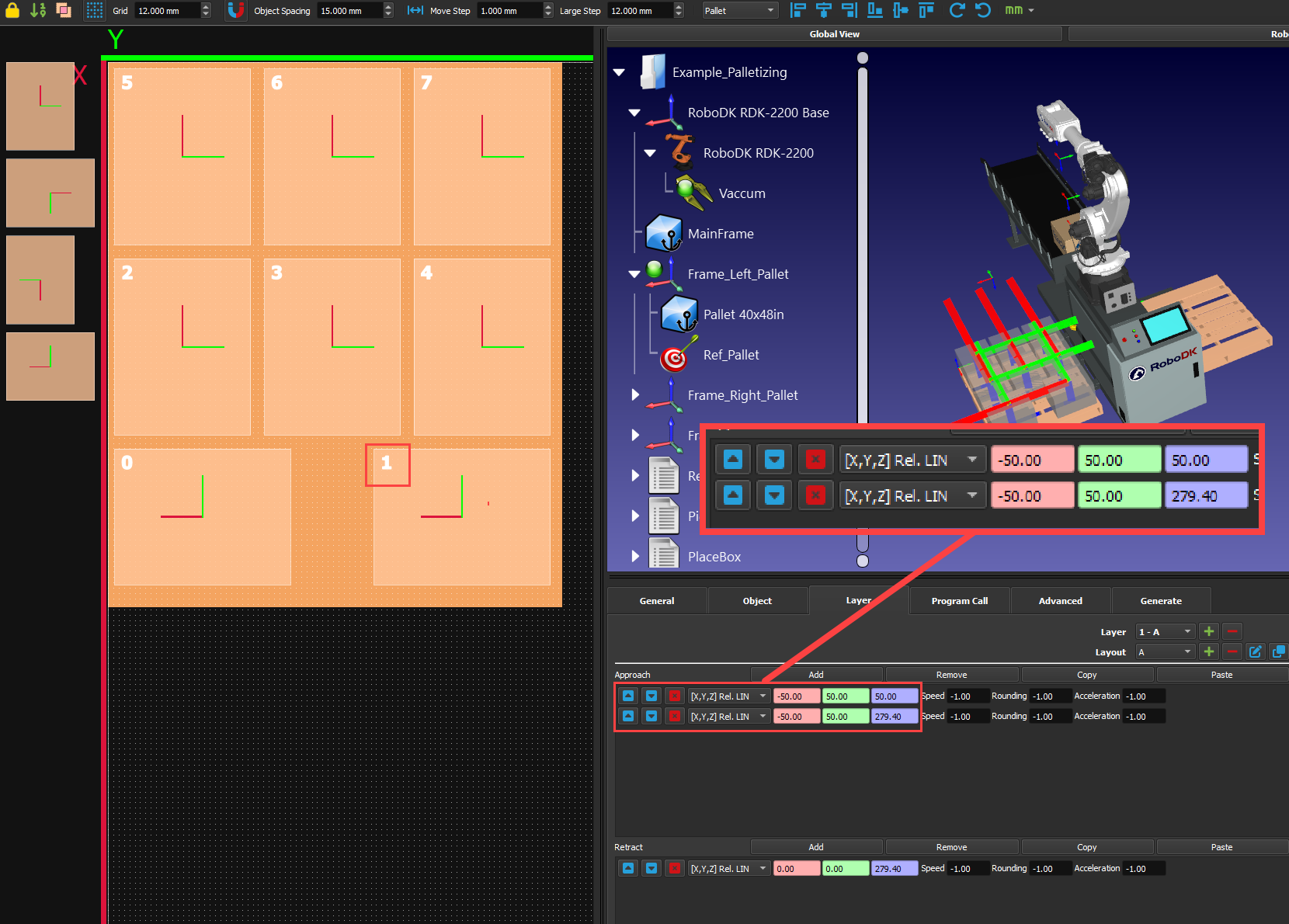
5.Crei il suo primo layout di livello. Il numero in alto a sinistra delle caselle rappresenta l'ordine in cui le caselle saranno posizionate. Può fare clic con il pulsante destro del mouse sulle caselle per modificarne l'ordine. Può anche aggiungere linee per avere un avvicinamento o un allontanamento personalizzato rispetto alle sue caselle. Può prendere i valori di questo esempio, ma non è obbligatorio. Provi a giocare con essi per vedere cosa fa il suo programma.
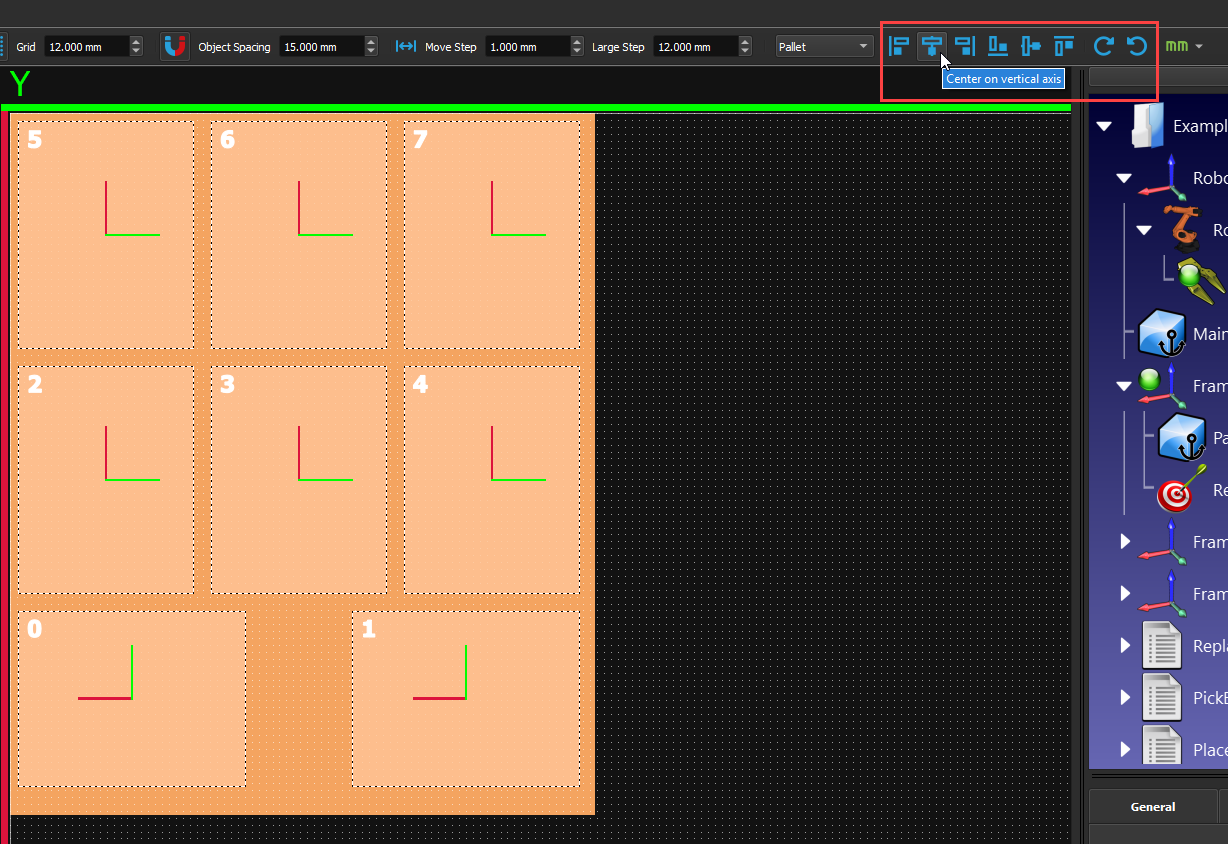
6.Può riallineare facilmente le sue caselle con i diversi pulsanti di allineamento in alto a destra. Selezioni tutti i suoi riquadri e clicchi sulle diverse opzioni finché non è soddisfatto. Può anche ruotare i suoi riquadri invece di generarne di nuovi con l'orientamento giusto.
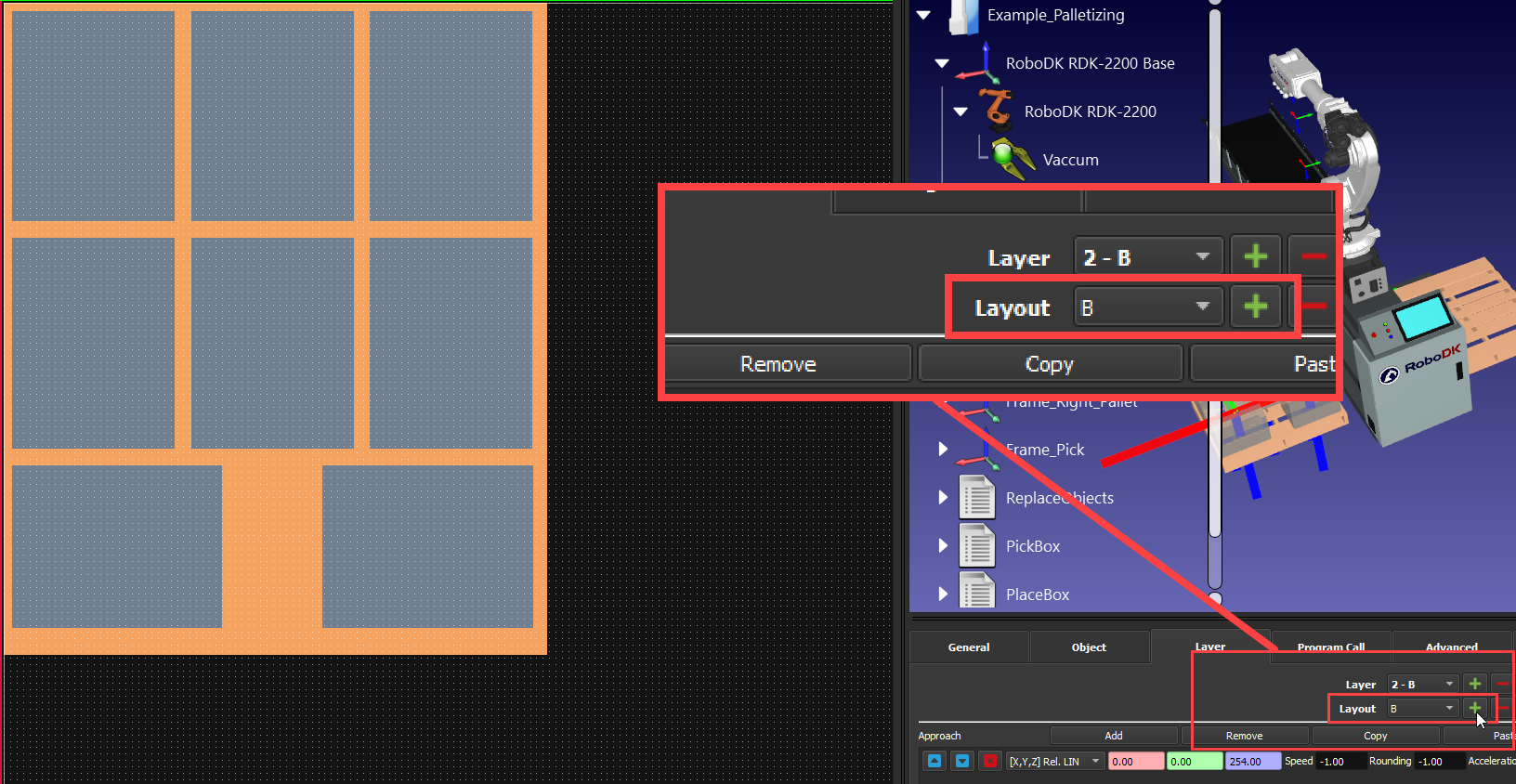
7.Aggiunga un nuovo livello alla pila premendo il pulsante "+ " accanto a "Livello". L'aggiunta di un nuovo livello copierà lo stesso modello del livello sottostante.
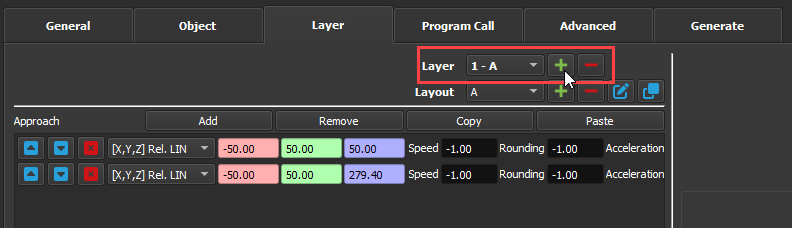
8.Può creare un nuovo layout (modello) premendo il pulsante "+ " accanto a "Layout". Il layout del livello precedente sarà ancora grigio, in modo da poter posizionare correttamente le nuove caselle sopra di esse.
9.Crei il suo layout alternativo. Può regolare con precisione la posizione delle caselle tenendo premuto CTRL e utilizzando le frecce della tastiera. Può modificare la dimensione di questo incremento in "Passo di spostamento" nella parte superiore della finestra.
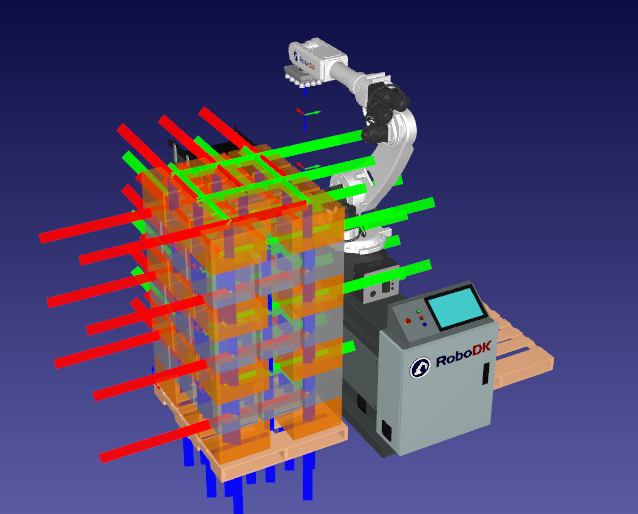
10.Può quindi aggiungere il numero di livelli che desidera e scegliere di alternarli. Guardi i colori delle scatole nella vista 3D per assicurarsi che le scatole siano ancora tutte alla portata del robot.
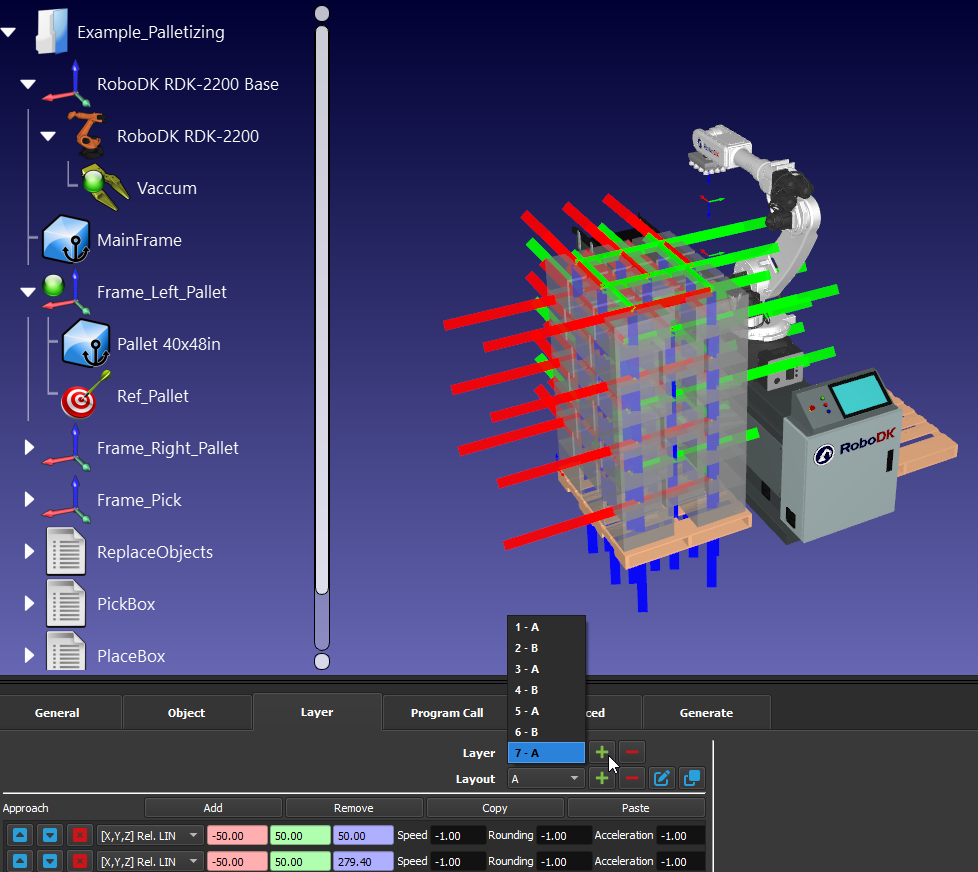
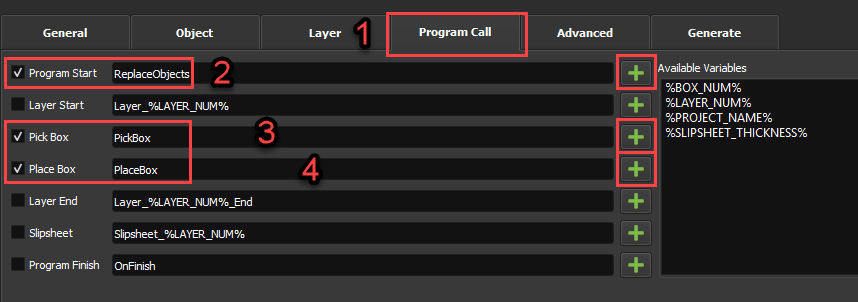
11.Nella scheda "Chiamata programma", può selezionare i programmi per i diversi eventi cliccando sul pulsante "+" e poi "spuntando" la casella corrispondente. Per esempio, deve scegliere almeno un programma "Pick Box" e un programma "Place Box", altrimenti non avrà un progetto funzionante. In questo esempio, utilizzeremo anche un programma "Avvio programma", ma potrebbe creare un programma "Vai a casa" e selezionarlo in "Fine programma", in modo che il robot torni a casa una volta terminato il pallet.
Genera programma robot
Una volta completate tutte le fasi di preparazione, potrà generare il programma del robot. Sarà quindi in grado di generare il programma del robot con il post processor giusto per il suo marchio di robot.
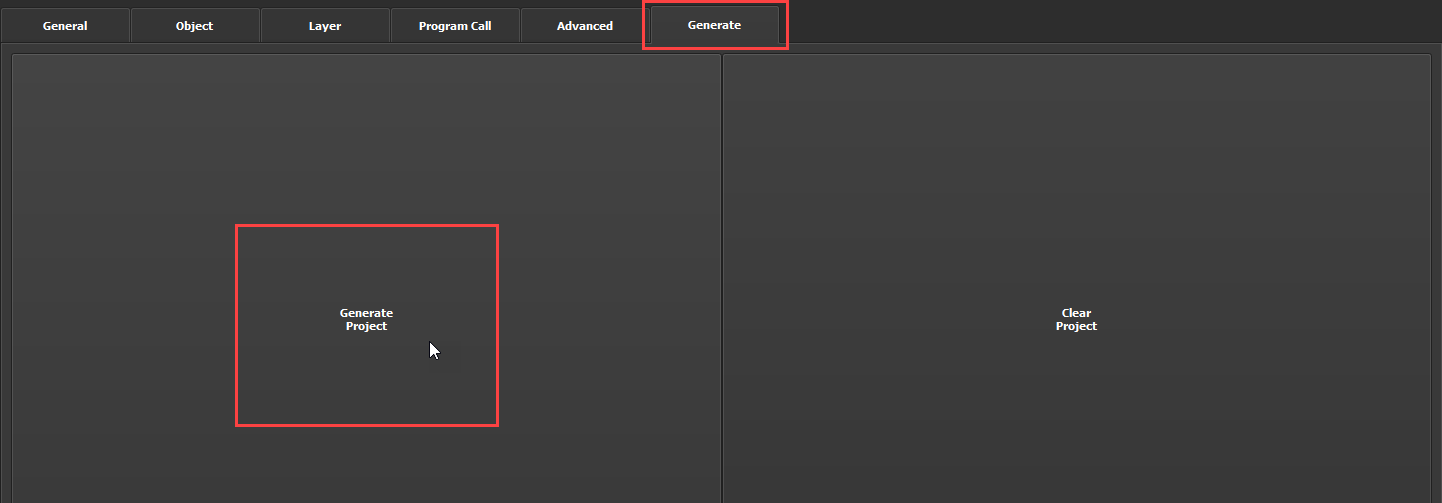
1.Nella scheda "Genera", faccia clic su "Genera progetto". Ora può chiudere la finestra per tornare al suo progetto. Ora dovrebbe avere un programma principale e programmi individuali per ogni livello.
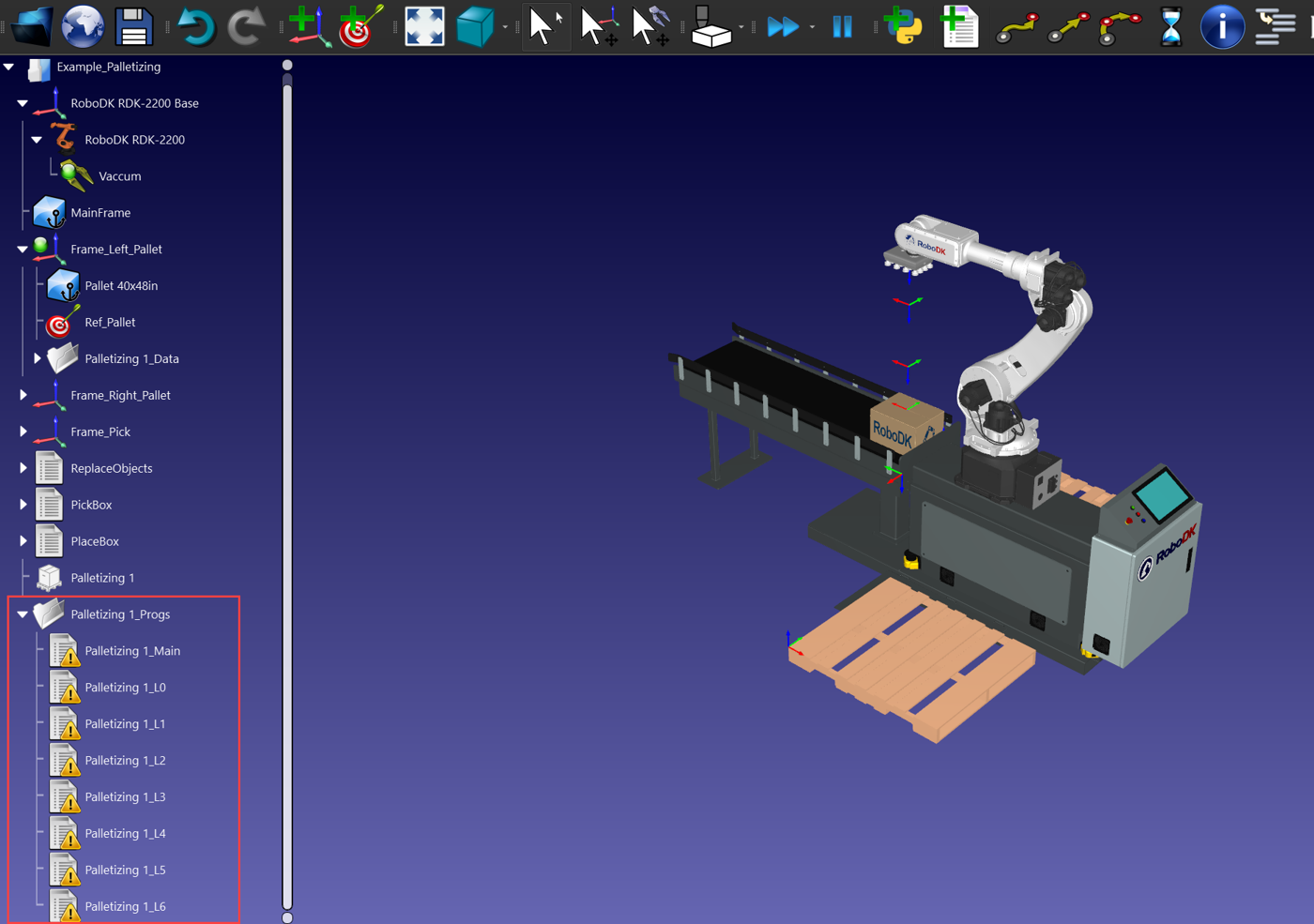
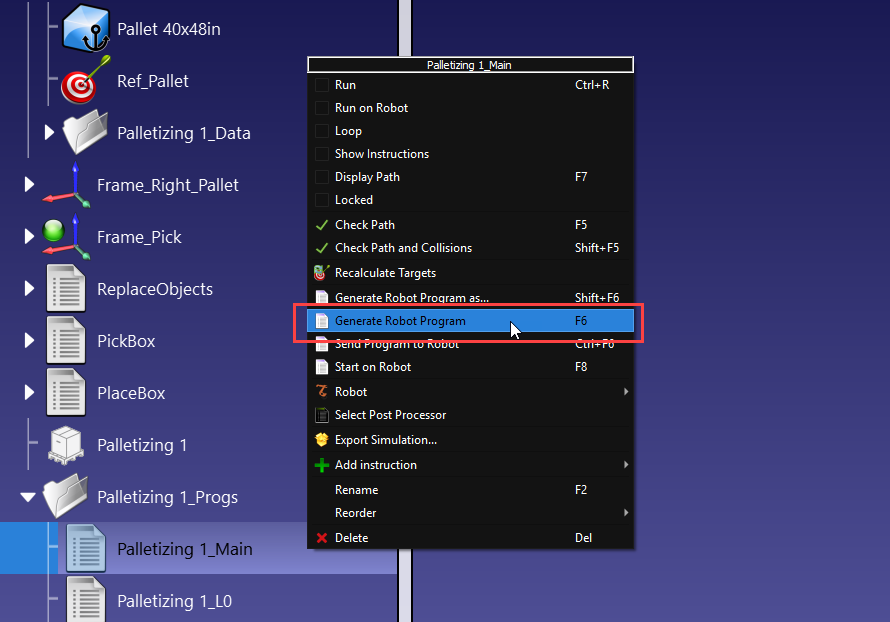
2.Fare doppio clic su "Pallettizzazione 1_Main" per eseguire il programma principale. Se è soddisfatto dei risultati, faccia clic con il pulsante destro del mouse sul programma principale e selezioni "Genera programma robot" per creare il programma che il controller del robot può eseguire.