Impostazioni del plugin
Selezioni il pulsante Impostazioni per aprire le impostazioni relative al plugin RoboDK per BobCAD-CAM.
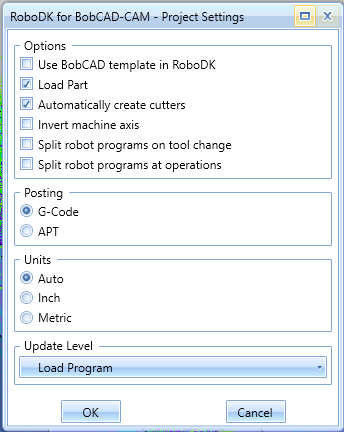
Tra le altre cose, può modificare le seguenti opzioni:
1.Utilizzi il modello BobCAD-CAM invece del modello RoboDK (i modelli di navigazione 3D e di colore in RoboDK corrisponderanno allo stile BobCAD-CAM).
2.Carica e aggiorna la parte in RoboDK ogni volta che pubblica una nuova operazione di lavorazione. Verranno caricati solo i solidi e le superfici visibili.
3.Selezionando l'opzione Inverti l'asse della macchina utensile, potrà tenere conto automaticamente del fatto che l'asse Z dell'utensile punta verso il lato interno dell'utensile (invece di puntare verso l'esterno).
4.Utilizzi i file G-Code invece dei file APT. RoboDK può leggere i seguenti file per generare simulazioni e programmi di robot:
a.File APT (opzione predefinita): Carica i file APT nativi di BobCAD-CAM in RoboDK. Questo è il metodo preferito per la maggior parte delle operazioni.
b.File di codice G: Genera file di lavorazione G-code. Si noti che questo formato dipende dal post processor selezionato e che è progettato principalmente per lavorare con percorsi di lavorazione a 3 assi.