RoboDK Plugin for BobCAD-CAM
Introduzione a BobCAD-CAM
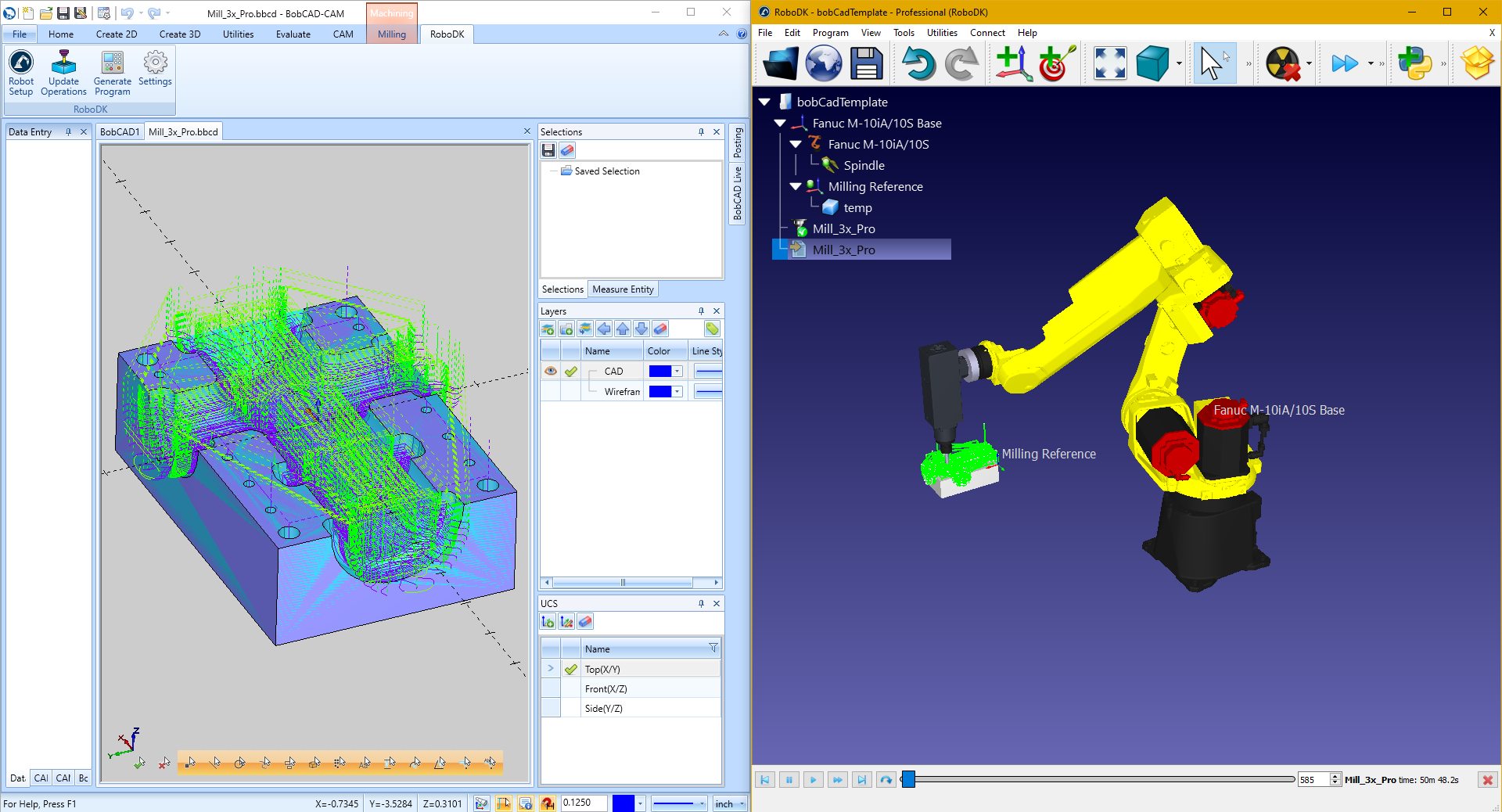
L'add-in RoboDK per BobCAD-CAM le permette di impostare rapidamente progetti di fresatura robotizzata direttamente dal software BobCAD-CAM. Con l'integrazione RoboDK per BobCAD-CAM, può facilmente combinare il software di lavorazione BobCAD-CAM con RoboDK per simulare e programmare bracci robotici industriali per la fresatura robotizzata.
Con questo add-in di BobCAD può generare facilmente programmi privi di errori per la fresatura robotizzata direttamente dal software BobCAD-CAM. In alternativa, RoboDK supporta anche i file di lavorazione APT CLS e G-code.
Maggiori informazioni su RoboDK per la lavorazione di robot sono disponibili nella sezione Lavorazione di robot. Per saperne di più sul software BobCAD-CAM, visiti il sito web BobCADdi .
Questo documento descrive come impostare il plugin RoboDK per il software BobCAD-CAM.
BobCAD-CAM Installare
Segua questi passaggi per installare il RoboDK Add-in per BobCAD-CAM. Si assicuri di utilizzare BobCAD-CAM v3.4 o successivo.
1.Apra la cartella del plugin BobCAD-CAM in RoboDK:
C:/RoboDK/Other/Plugin-BobCADCAM
In alternativa, può scaricare il plugin RoboDK per BobCAD-CAM
https://robodk.com/files/upload/BobCAD-CAM-RoboDK-plugin.zip.
E contrassegnare il plugin come sicuro:
clicchi con il tasto destro del mouse sulla cartella ZIP, selezioni Proprietà e selezioni l'opzione Sblocca.
2.Esegua il file Install.bat .
Se l'esecuzione del file Install.BAT non riesce, può estrarre il contenuto della cartella ZIP nella cartella:
C:\BobCAD-CAM Data\BobCAD-CAM V34
O nella sua directory di installazione equivalente. Unisca i contenuti, se necessario.
3.Riavvia il software BobCAD-CAM.
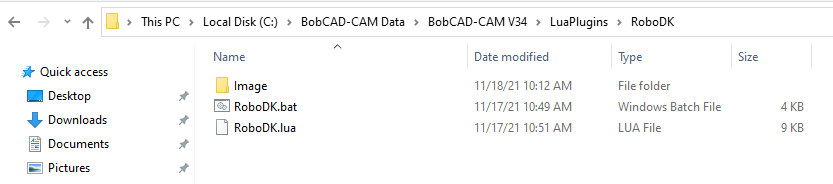
La cartella di installazione del plugin dovrebbe apparire come mostrato nella seguente immagine.
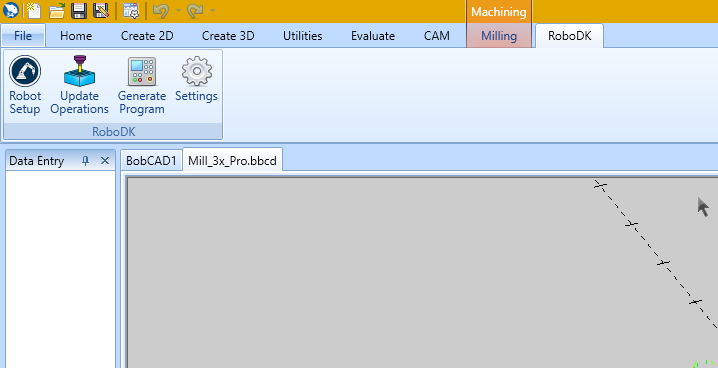
Barra degli strumenti
Quando apre il software BobCAD-CAM, dovrebbe vedere una barra degli strumenti RoboDK. Selezioni questa scheda RoboDK per vedere le opzioni disponibili per impostare il suo progetto di fresatura robotizzata in RoboDK.
Configurazione del robot
Il pulsante Impostazione del robot
Può facilmente cambiare il robot, modificare l'utensile e/o il piano di riferimento. A titolo di esempio, segua la seguente procedura per cambiare il robot:
1.Clicchi con il tasto destro del mouse sul robot
2.Selezioni Sostituisci robot (come mostrato nell'immagine).
3.Seleziona il nuovo robot
Il programma di installazione di RoboDK fornisce solo alcuni robot di default, tuttavia è possibile scaricare altri robot dalla libreria online.
Maggiori informazioni sull'aggiunta di uno strumento robot sono disponibili nella sezione Guida introduttiva.
Tenga premuto Alt+Shift per spostare uno strumento del robot (TCP). Questo è utile per impostare la posa del robot prima di insegnare un bersaglio.
Salvi il progetto per mantenere le modifiche, selezionando File➔ Salva stazione (Ctrl+S).
Aggiornare le operazioni selezionate
Selezioni il pulsante Aggiorna operazioni per inviare il percorso di lavorazione dal software BobCAD-CAM a RoboDK. Questo sostituirà qualsiasi progetto di lavorazione del robot esistente che abbia lo stesso nome.
Verrà visualizzato un segno di spunta verde se il programma è fattibile con il robot selezionato. Se ci sono problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso con un messaggio del problema.
Clicchi due volte sul progetto di lavorazione robot
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per ottenere il programma robot che deve essere caricato sul controller robot. Maggiori informazioni su come generare i programmi del robot sono disponibili nella sezione Programmazione offline.
Se necessario, faccia clic con il pulsante destro del mouse su un programma e selezioni Post Processor per cambiare il Post Processor. Questo passaggio può aiutarla a personalizzare l'aspetto del codice generato. Maggiori informazioni sulla selezione e la personalizzazione dei post processor sono disponibili nella sezione Post processor.
Genera il programma
Può generare programmi di robot direttamente dal software BobCAD-CAM, una volta che la sua stazione RoboDK è pronta. Per farlo, selezioni Generare Programma. Questa opzione aggiornerà i programmi del robot in base al percorso di lavorazione definito nel suo progetto BobCAD-CAM.
Segua questi passaggi in RoboDK per visualizzare o modificare la posizione dei programmi del suo robot:
1.Selezionare Strumenti-Opzioni
2.Selezioni la scheda Programma
3.Selezionare Set nella cartella Programmi del robot
Impostazioni del plugin
Selezioni il pulsante Impostazioni per aprire le impostazioni relative al plugin RoboDK per BobCAD-CAM.
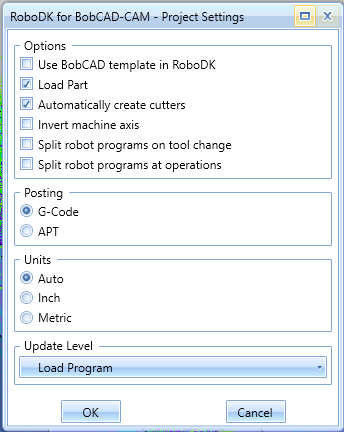
Tra le altre cose, può modificare le seguenti opzioni:
1.Utilizzi il modello BobCAD-CAM invece del modello RoboDK (i modelli di navigazione 3D e di colore in RoboDK corrisponderanno allo stile BobCAD-CAM).
2.Carica e aggiorna la parte in RoboDK ogni volta che pubblica una nuova operazione di lavorazione. Verranno caricati solo i solidi e le superfici visibili.
3.Selezionando l'opzione Inverti l'asse della macchina utensile, potrà tenere conto automaticamente del fatto che l'asse Z dell'utensile punta verso il lato interno dell'utensile (invece di puntare verso l'esterno).
4.Utilizzi i file G-Code invece dei file APT. RoboDK può leggere i seguenti file per generare simulazioni e programmi di robot:
a.File APT (opzione predefinita): Carica i file APT nativi di BobCAD-CAM in RoboDK. Questo è il metodo preferito per la maggior parte delle operazioni.
b.File di codice G: Genera file di lavorazione G-code. Si noti che questo formato dipende dal post processor selezionato e che è progettato principalmente per lavorare con percorsi di lavorazione a 3 assi.