Impostazioni del plugin
Selezioni la macro Impostazioni per aprire le impostazioni di FeatureCAM relative a RoboDK. Vedrà la finestra delle impostazioni mostrata nell'immagine seguente.
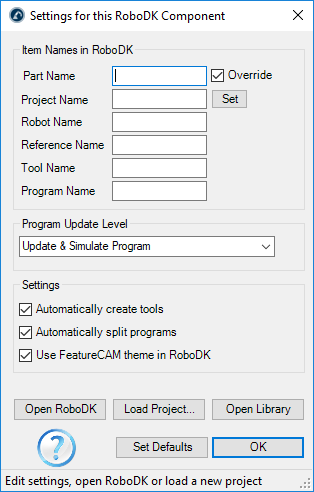
Può modificare le seguenti opzioni:
1.Il nome della parte è il nome del modello 3D quando viene caricato in RoboDK. Lasciarlo vuoto per utilizzare automaticamente il nome usato in FeatureCAM.
2.Il nome del progetto le consente di specificare un file di progetto RoboDK (RDK). È possibile specificare un progetto RoboDK (file RDK) predefinito per visualizzare automaticamente le simulazioni o generare programmi robotici. Lasciare vuoto per utilizzare automaticamente il progetto attualmente aperto in RoboDK.
3.Crea automaticamente utensili consente di creare automaticamente nuovi TCP in base al portautensili e alla geometria della fresa definiti in FeatureCAM. Il primo utensile tenuto dal robot è considerato il portautensili e i nuovi TCP sono calcolati come un offset dal portautensili.
4.I programmi suddivisi automaticamente dividono automaticamente il progetto completo di lavorazione del robot in sottoprogetti (operazioni). Creando un'operazione per ogni utensile.
5.Utilizzando il tema FeatureCAM in RoboDK, i colori della navigazione 3D e dello sfondo di RoboDK corrisponderanno allo stile di FeatureCAM.
Può anche specificare il portautensili e il quadro di riferimento (datum) per le operazioni di lavorazione del robot.
Selezioni Carica progetto... per visualizzare l'anteprima del progetto aperto di recente o per creare un nuovo progetto utilizzando l'impostazione predefinita
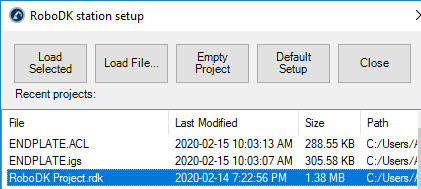
Sono disponibili le seguenti opzioni:
●Carica selezionato: Carica un progetto precedente utilizzato in RoboDK (file RDK).
●Carica file...: Selezioni un file di stazione RoboDK (RDK) per aprirlo con RoboDK e utilizzarlo come progetto predefinito con il progetto FeatureCAM corrente.
●Progetto vuoto: Apra RoboDK con una nuova stazione vuota per costruire una nuova configurazione. Maggiori informazioni per impostare un nuovo progetto da zero sono disponibili nella sezione Guida introduttiva.
●Carica parte: Carica la parte da FeatureCAM a RoboDK (la parte sarà salvata come file STL e caricata automaticamente).
●Impostazione predefinita: Imposta una nuova stazione con un robot, un mandrino e un piano di riferimento predefiniti. La parte verrà esportata automaticamente in RoboDK.
Visiti la sezione fresatura robotizzata sulla per maggiori informazioni sulla costruzione di una nuova configurazione per la fresatura robotizzata.