RoboDK Plugin for FeatureCAM
Introduzione
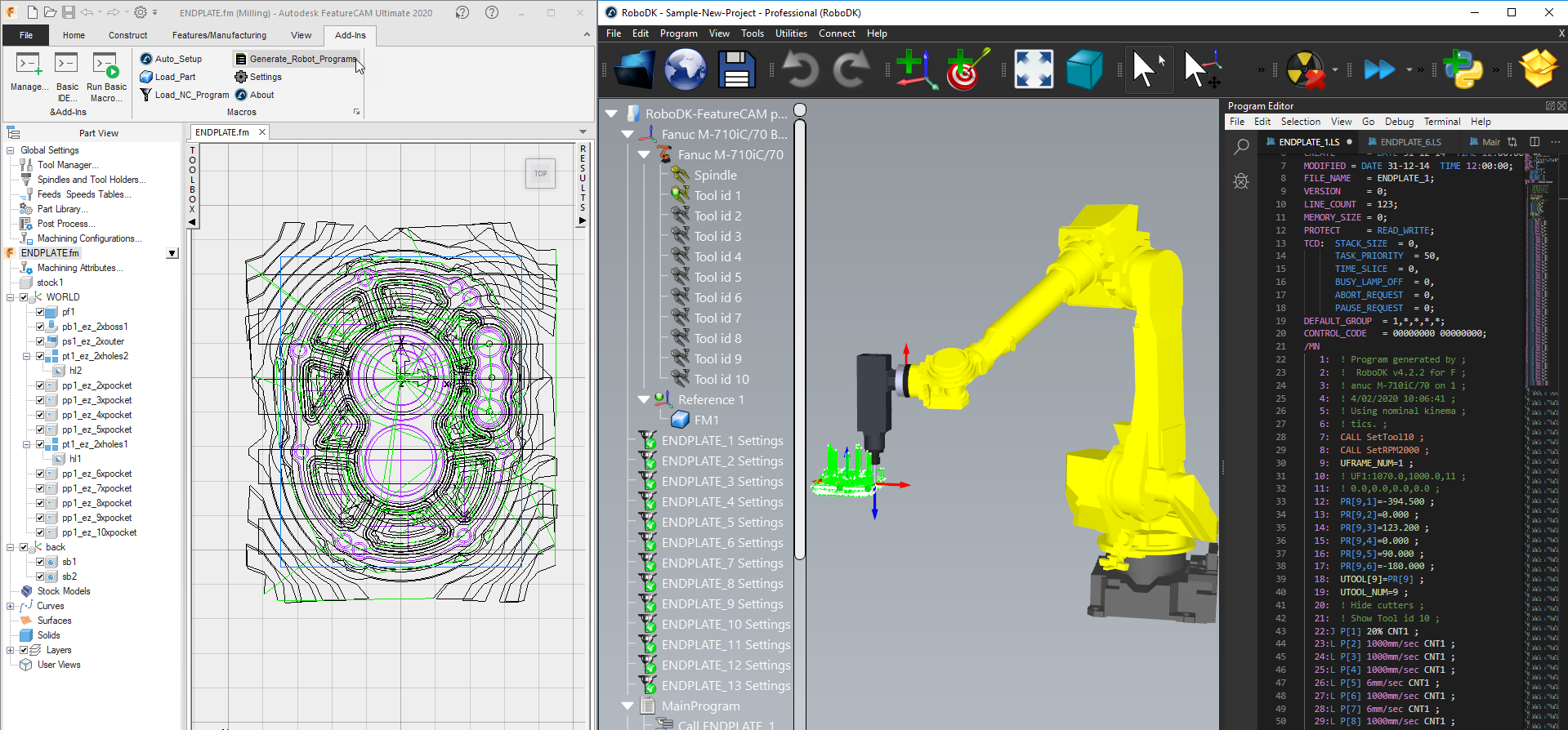
L'add-in RoboDK per Autodesk FeatureCAM le consente di impostare rapidamente progetti di fresatura robotizzata direttamente da FeatureCAM. Con l'add-in RoboDK per FeatureCAM può combinare facilmente il software FeatureCAM per la lavorazione e RoboDK per simulare e programmare bracci robotici industriali per la fresatura robotizzata.
Maggiori informazioni su RoboDK per la lavorazione di robot sono disponibili nella sezione Lavorazione di robot.
Il video che segue mostra una rapida panoramica del plugin RoboDK per FeatureCAM: : Il video seguente mostra una rapida panoramica del plugin RoboDK per FeatureCAM: https://youtu.be/rwL_z3WYMkY.
Questo documento descrive come impostare il plugin per FeatureCAM e come utilizzare la barra degli strumenti FeatureCAM per impostare i progetti di lavorazione dei robot in RoboDK.
Set di Add-in
Se ha installato RoboDK dopo aver installato FeatureCAM, dovrebbe avere il plugin RoboDK per FeatureCAM già nella libreria Add-in.
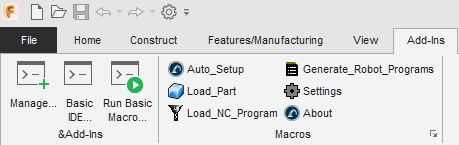
Una volta attivato l'Add-in RoboDK, dovrebbe vedere le macro mostrate nell'immagine seguente.
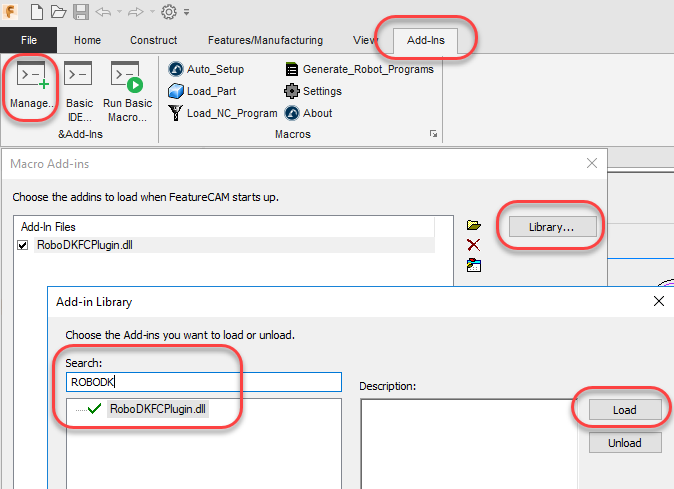
Se non vede le macro RoboDK, segua questi passaggi per impostare l'add-in RoboDK per FeatureCAM:
1.Avvia FeatureCAM.
2.Seleziona Add-in➔ Gestisci
3.Selezionare Biblioteca...
4.Cerchi la libreria RoboDKFCPlugin.dll (può digitare RoboDK per individuarla rapidamente).
5.Selezionare il carico
6.Selezioni OK.
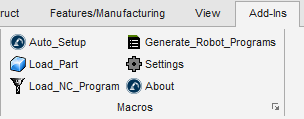
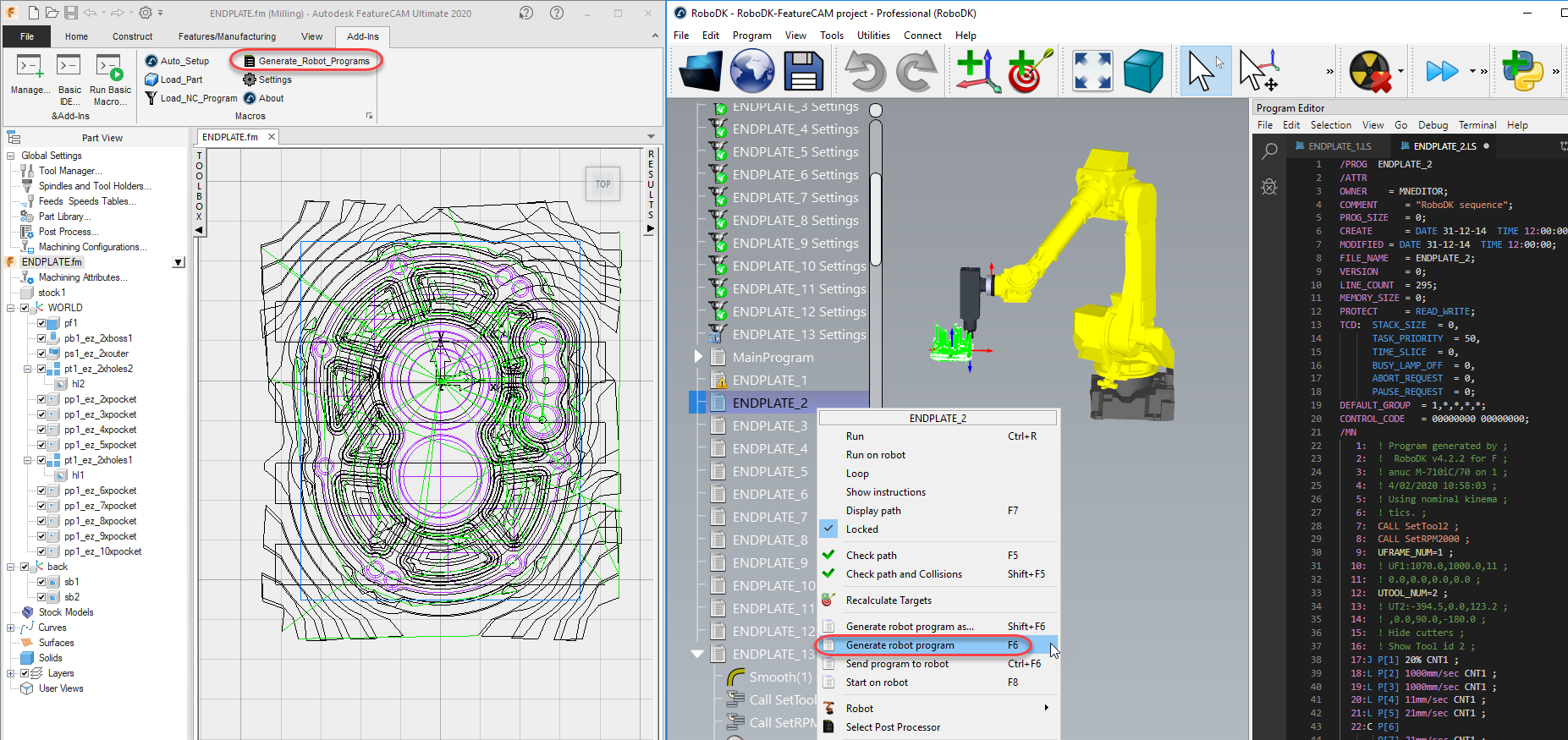
FeatureCAM mostrerà quindi i comandi RoboDK nella sezione Add-in, come mostrato nell'immagine seguente.
Comandi
Questa sezione descrive i comandi dell'add-in RoboDK disponibili in FeatureCAM per la lavorazione con robot.
●La macro Auto Setup carica automaticamente il pezzo e il programma di lavorazione in RoboDK.
●Carica Parte carica automaticamente il modello 3D della sua parte in RoboDK.
●Carica programma NC crea automaticamente un progetto di fresatura robotizzata in RoboDK per simulare il suo robot e creare un programma per la fresatura robotizzata.
●Genera programmi robot genera automaticamente i programmi robot disponibili in RoboDK.
●Impostazioni apre la finestra delle impostazioni aggiuntive.
●Informazioni apre questo documento di aiuto.
Impostazione automatica
L'Autoimpostazione
L'impostazione automatica caricherà/aggiornerà il modello 3D e il percorso di lavorazione del robot in RoboDK.
Se ha già una stazione RoboDK aperta, utilizzerà il progetto RoboDK esistente senza sovrascrivere il robot, l'utensile o il sistema di coordinate.
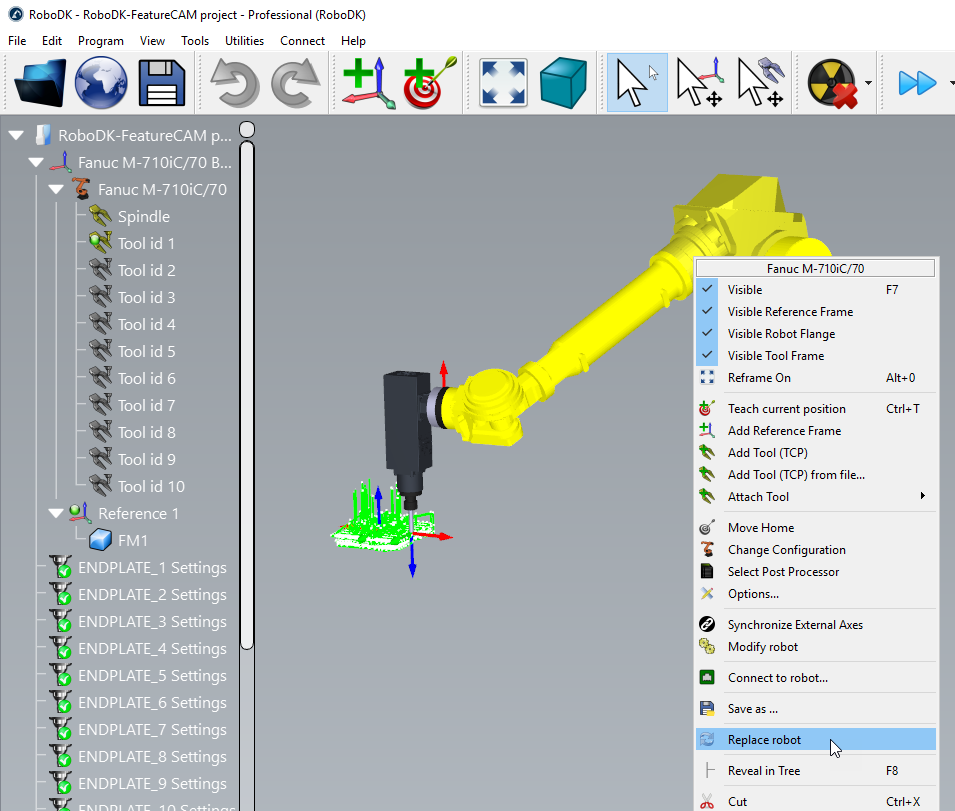
Può facilmente cambiare il robot, modificare l'utensile e/o il piano di riferimento. A titolo di esempio, segua la seguente procedura per cambiare il robot:
1.Clicchi con il tasto destro del mouse sul robot
2.Selezioni Sostituisci robot (come mostrato nell'immagine seguente).
3.Selezioni il robot che desidera utilizzare
Il programma di installazione di RoboDK fornisce solo alcuni robot di default, tuttavia è possibile scaricare altri robot dalla libreria online.
Maggiori informazioni sull'aggiunta di uno strumento robot sono disponibili nella sezione Guida introduttiva.
Salvi il progetto per mantenere le modifiche, selezionando File➔ Salva stazione (Ctrl+S).
Una volta aggiornata la cella del robot, selezioni Utilità➔ Aggiorna progetto di lavorazione robot per aggiornare tutti i programmi. Verrà visualizzato un segno di spunta verde se i programmi sono fattibili con i parametri attuali della cella. Se ci sono dei problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso.
Clicchi due volte sul progetto di lavorazione robot
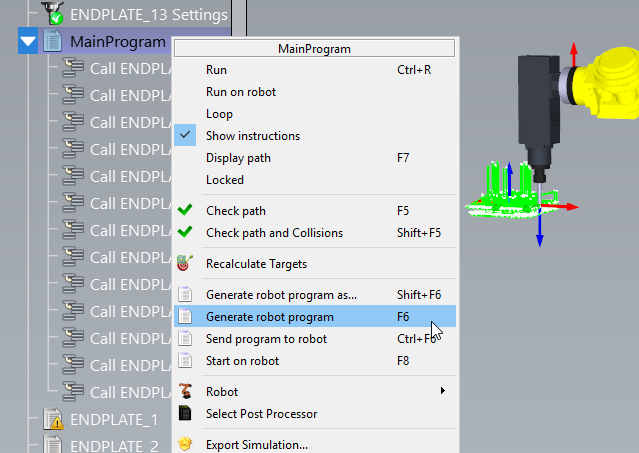
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per generare il programma robot per il suo controller robot. Maggiori informazioni su come generare i programmi robot sono disponibili nella sezione Programmazione offline.
Può anche fare clic con il pulsante destro del mouse su un programma e selezionare Seleziona post processor per cambiare il post processor. Maggiori informazioni sui processori di post sono disponibili nella sezione processori di postdedicata ai .
Genera programmi robotici
Selezionare Genera programmi robot per generare i programmi del robot per la lavorazione del robot. Questa operazione aprirà una nuova finestra (editor di programmi) che visualizza i programmi del robot.
Segua questi passaggi in RoboDK per cambiare la posizione dei suoi programmi robotici salvati:
1.Selezionare Strumenti-Opzioni
2.Seleziona il programma
3.Selezionare Imposta accanto alla cartella Programmi del robot
Impostazioni del plugin
Selezioni la macro Impostazioni per aprire le impostazioni di FeatureCAM relative a RoboDK. Vedrà la finestra delle impostazioni mostrata nell'immagine seguente.
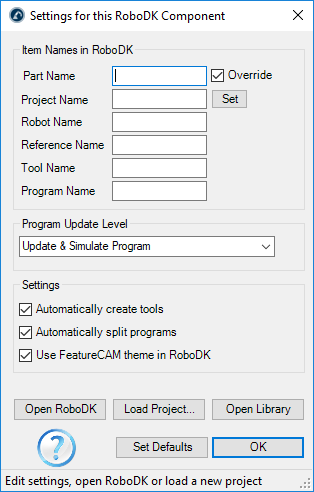
Può modificare le seguenti opzioni:
1.Il nome della parte è il nome del modello 3D quando viene caricato in RoboDK. Lasciarlo vuoto per utilizzare automaticamente il nome usato in FeatureCAM.
2.Il nome del progetto le consente di specificare un file di progetto RoboDK (RDK). È possibile specificare un progetto RoboDK (file RDK) predefinito per visualizzare automaticamente le simulazioni o generare programmi robotici. Lasciare vuoto per utilizzare automaticamente il progetto attualmente aperto in RoboDK.
3.Crea automaticamente utensili consente di creare automaticamente nuovi TCP in base al portautensili e alla geometria della fresa definiti in FeatureCAM. Il primo utensile tenuto dal robot è considerato il portautensili e i nuovi TCP sono calcolati come un offset dal portautensili.
4.I programmi suddivisi automaticamente dividono automaticamente il progetto completo di lavorazione del robot in sottoprogetti (operazioni). Creando un'operazione per ogni utensile.
5.Utilizzando il tema FeatureCAM in RoboDK, i colori della navigazione 3D e dello sfondo di RoboDK corrisponderanno allo stile di FeatureCAM.
Può anche specificare il portautensili e il quadro di riferimento (datum) per le operazioni di lavorazione del robot.
Selezioni Carica progetto... per visualizzare l'anteprima del progetto aperto di recente o per creare un nuovo progetto utilizzando l'impostazione predefinita
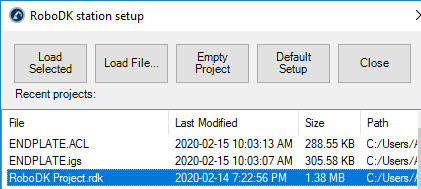
Sono disponibili le seguenti opzioni:
●Carica selezionato: Carica un progetto precedente utilizzato in RoboDK (file RDK).
●Carica file...: Selezioni un file di stazione RoboDK (RDK) per aprirlo con RoboDK e utilizzarlo come progetto predefinito con il progetto FeatureCAM corrente.
●Progetto vuoto: Apra RoboDK con una nuova stazione vuota per costruire una nuova configurazione. Maggiori informazioni per impostare un nuovo progetto da zero sono disponibili nella sezione Guida introduttiva.
●Carica parte: Carica la parte da FeatureCAM a RoboDK (la parte sarà salvata come file STL e caricata automaticamente).
●Impostazione predefinita: Imposta una nuova stazione con un robot, un mandrino e un piano di riferimento predefiniti. La parte verrà esportata automaticamente in RoboDK.
Visiti la sezione fresatura robotizzata sulla per maggiori informazioni sulla costruzione di una nuova configurazione per la fresatura robotizzata.
Esempi
Lavorazione robotica a 3 assi
Questo esempio mostra come creare un progetto di fresatura robotizzata a 3 assi utilizzando il plugin FeatureCAM.
Lavorazione robotica a 5 assi
Questo esempio mostra come creare un progetto di taglio robotico a 5 assi utilizzando il plugin FeatureCAM.