Add-in RoboDK per Fusion 360
Il componente aggiuntivo RoboDK per Autodesk Fusion 360 consente di combinare le funzioni di modellazione CAD/CAM 3D di Autodesk Fusion 360 con RoboDK per la simulazione di robot e la programmazione offline.
Con il plug-in RoboDK per Fusion 360 può caricare facilmente i modelli 3D creati in Fusion 360 in RoboDK. Questo plug-in le permette di programmare più di 30 produttori di robot diversi e 400 robot direttamente da Autodesk Fusion 360.
I robot possono essere facilmente programmati come macchine a 5 assi per applicazioni di produzione come la foratura, la saldatura, la rifilatura, la stampa 3D o la fresatura robotizzata. Maggiori informazioni sono disponibili nella sezione fresatura robotizzata.
La sezione post processori robot mostra un elenco delle marche di robot e dei controllori robotici supportati da RoboDK. È anche possibile modificare o creare nuovi post processor per personalizzare la generazione del programma.
L'Add-in RoboDK per Fusion è gratuito se si possiede una licenza RoboDK.
Installare
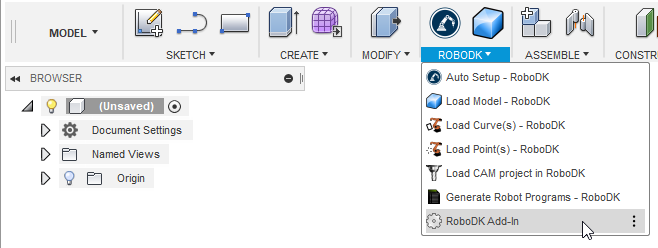
Se ha già installato Autodesk Fusion 360 e RoboDK, potrebbe avere già installato e pronto l'Add-in RoboDK per Fusion. L'Add-in RoboDK per Fusion 360 dovrebbe essere visibile nella barra degli strumenti.
Barra degli strumenti di Fusion 360
La barra degli strumenti predefinita di RoboDK per Autodesk Fusion 360 include una barra degli strumenti dedicata a RoboDK con 7 comandi per scopi CAD e CAM.
●
●
●
●
●
●
●
La differenza principale tra Auto Setup e Load Curve(s) o Load Point(s) è che Auto Setup carica la parte e crea un nuovo progetto Curve/Punti. L'uso di Load Curve(s) o Load Point(s) è più veloce e si limita ad aggiornare le caratteristiche geometriche esistenti in RoboDK, mantenendo le impostazioni definite in precedenza.
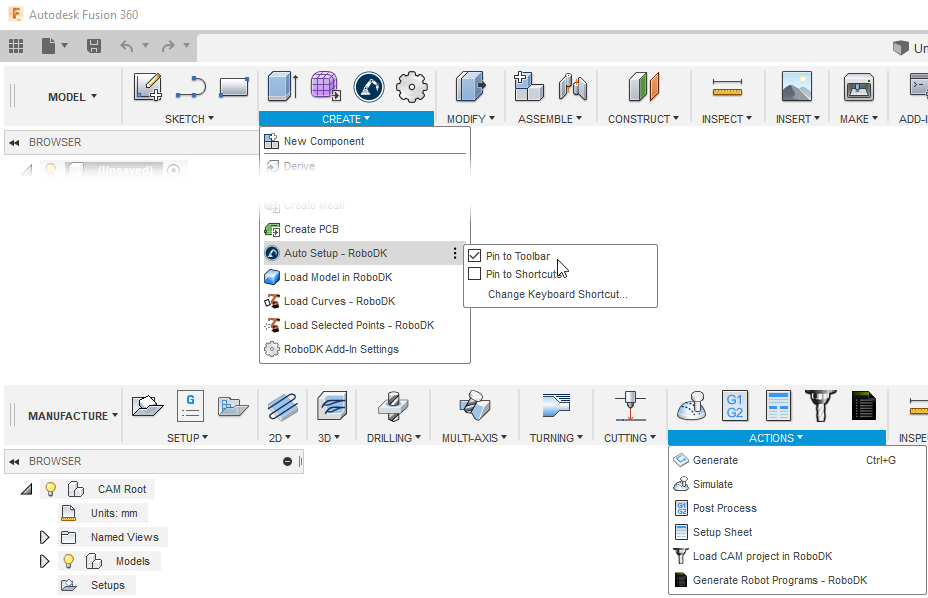
Troverà anche 5 comandi nella scheda CREA dell'area di lavoro MODELLO (funzioni CAD) e 2 comandi nella scheda AZIONI dell'area di lavoro FABBRICAZIONE (funzioni CAM).
Impostazioni
Può modificare le impostazioni predefinite del plug-in RoboDK selezionando il pulsante Impostazioni.
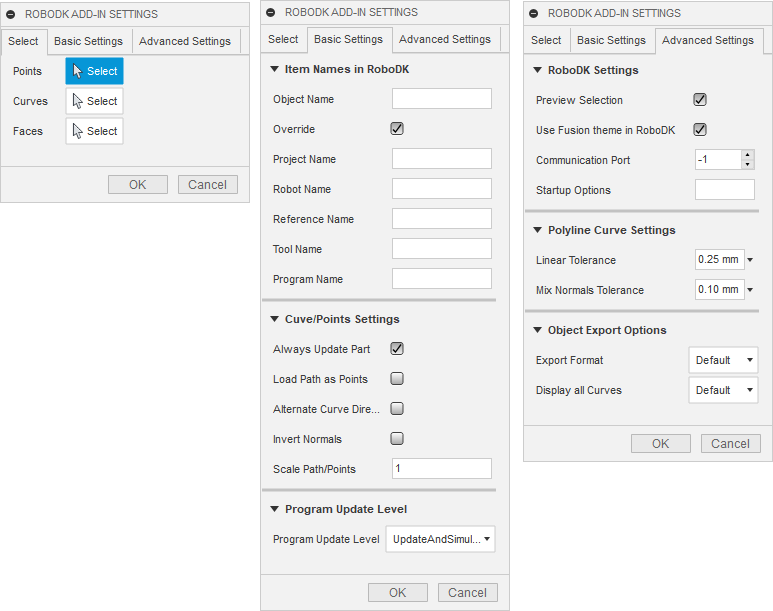
Impostazioni di base:
●Nome oggetto - Imposta il nome dell'oggetto curva/punti che sarà caricato in RoboDK. Se questo caso viene lasciato vuoto, verrà utilizzato il nome della parte o del file di assieme.
●Sovrascrive - Sovrascrive l'oggetto caricato in precedenza in RoboDK se c'è una corrispondenza di nome.
●Nome del progetto - Imposti il nome/percorso del progetto/stazione RoboDK (file .RDK) da utilizzare. Se il file è già caricato, utilizzerà il progetto esistente. Se il progetto aperto in RoboDK non corrisponde al nome del file, aprirà il progetto se viene specificato il percorso completo.
●Nome robot - Impostare il nome del robot che sarà utilizzato in RoboDK (se ha più di 1 robot nel suo progetto). Il nome del robot deve corrispondere al nome visibile nella struttura della stazione RoboDK. Lasciare questo valore vuoto (default) per utilizzare il primo o l'unico robot disponibile.
●Nome riferimento - Imposta il nome del quadro di riferimento per posizionare il percorso rispetto al robot. Il nome deve corrispondere al nome visibile nell'albero delle stazioni di RoboDK. Se non viene fornito un nome, verrà utilizzato il quadro di riferimento attivo
●Nome utensile - Impostare il nome dell'utensile (TCP) da utilizzare con il robot per seguire il percorso. Il nome deve corrispondere al nome visibile nell'albero delle stazioni di RoboDK. Se non viene fornito un nome, verrà utilizzato il telaio utensile attivo
●Nome programma - Imposta il nome del file di programma che verrà generato.
●Aggiorna sempre la parte - Selezioni questa opzione per aggiornare sempre il modello 3D da Fusion a RoboDK. Questo aggiornerà la parte quando si selezionano curve o punti.
●Carica tracciato come punti - Selezioni questa opzione per convertire una curva in punti, in modo da creare un progetto Point follow in RoboDK. Questo è utile per le operazioni di produzione come la foratura. Deselezionare questa opzione per caricare il percorso come progetto Curve follow.
●Direzioni alternate della curva - Selezioni questa opzione per alternare la direzione del movimento ad ogni passaggio (modello Zig-Zag).
●Inverti norme - Selezioni questa opzione per invertire le norme della superficie calcolata. Questo capovolgerà l'orientamento dell'utensile del robot.
Impostazioni avanzate:
●Usare il tema Fusion 360 in RoboDK - Avvii RoboDK con il tema Autodesk Fusion 360. Questo include la modifica del comportamento del mouse per la navigazione 3D e il colore dello sfondo. Queste impostazioni possono essere modificate nel menu RoboDK: Strumenti-Opzioni.
●Porta di comunicazione - Impostare la porta di comunicazione per comunicare con RoboDK. Più istanze di RoboDK possono essere in esecuzione contemporaneamente e utilizzare configurazioni diverse se viene utilizzata una porta diversa. Quando questo valore è impostato su -1 (predefinito), viene utilizzata la porta predefinita (20500).
●Opzioni di avvio - Imposta gli argomenti da passare a RoboDK al primo avvio. Ad esempio, per avviare RoboDK in modo silenzioso, può impostare '/NOSPLASH /NOSHOW /HIDDEN'. I programmi possono essere generati anche se RoboDK non viene visualizzato. Maggiori informazioni nella sezione Riga di comando dell'API RoboDK.
●Tolleranza lineare (mm) - Imposta la precisione lineare per dividere le curve come un insieme di punti.
●Tolleranza di miscelazione delle normali (mm) - Imposta la tolleranza della distanza utilizzata per miscelare i calcoli delle normali tra più superfici.
●Formato di esportazione - Selezioni il formato di esportazione per caricare la parte in RoboDK.
●Visualizza tutte le curve dell'oggetto - Visualizza le curve caricate in RoboDK anche se non sono selezionate. Può modificare questa impostazione in RoboDK (Strumenti-Opzioni-Visualizzazione-Visualizzazione curve).
Esempi
Questa sezione mostra esempi di base che combinano i progetti di Autodesk Fusion 360 con RoboDK per la simulazione di robot e la programmazione offline.
Taglio laser
L'esempio seguente mostra come può programmare un robot industriale per un'applicazione di taglio laser.
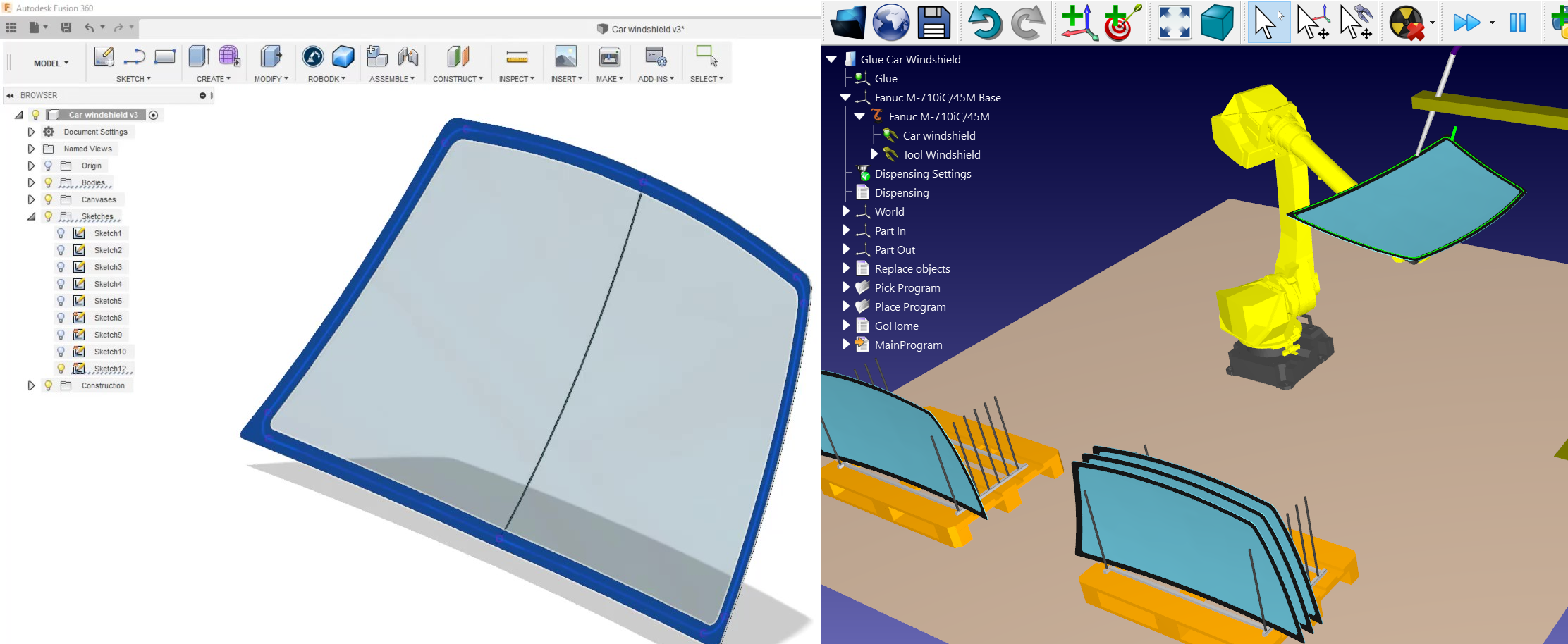
Erogazione di colla
L'esempio seguente mostra come si può creare una simulazione di robot e un programma per un'applicazione di erogazione di colla. In questo esempio, il robot tiene il pezzo e l'utensile è statico. Questo tipo di configurazione viene anche definito TCP remoto.
Sbavatura robotica
L'esempio seguente mostra come si può programmare un robot per un'applicazione di sbavatura. Questo esempio richiede l'utilizzo del banco di lavoro Manufacturing di Fusion (strumenti CAM/lavorazione) e la aiuterà a utilizzare Fusion e RoboDK per le applicazioni di fresatura robotizzata.
Installazione manuale
Questi sono i passaggi manuali per configurare il plug-in RoboDK per Autodesk Fusion 360. Deve seguire questi passaggi se il plug-in RoboDK per Fusion non è stato installato automaticamente per impostazione predefinita utilizzando il programma di installazione RoboDK:
1.Installi Autodesk Fusion (se non l'ha ancora fatto).
2.Scarichi e installi RoboDK.
3.Scarichi il plugin RoboDK per Autodesk Fusion 360.
4.Decomprima il contenuto in C:\RoboDK\Other\Plugin-Fusion360\RoboDK\
Installi il plug-in RoboDK in Fusion 360:
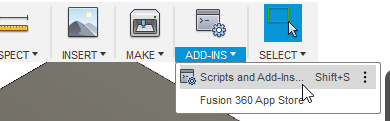
5.Apra Autodesk Fusion 360.
6.Selezioni ADD-INS-Scripts e Add-in (Shift+S), dall'area di lavoro MODELLO.
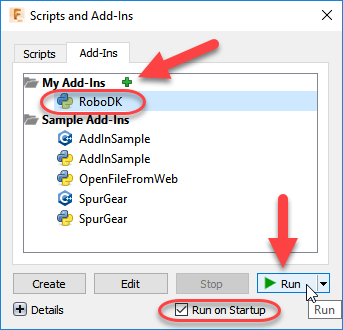
7.Selezioni la scheda Add-in.
8.Selezioni il pulsante verde +
9.Inserisca il seguente percorso:
C:\RoboDK\Other\Plugin-Fusion360\RoboDK\
10.Selezioni l'opzione Esegui all'avvio per avviare Fusion 360 con il RoboDK Add-in.
11.Selezionare Esegui
Dovrebbe quindi vedere una barra degli strumenti chiamata RoboDK nell'area di lavoro MODELLO.
Inoltre, tutti i comandi relativi al CAD nella barra degli strumenti CREA (dall'area di lavoro MODELLO) e tutti i comandi relativi al CAM nella barra degli strumenti AZIONI (dall'area di lavoro FABBRICAZIONE).