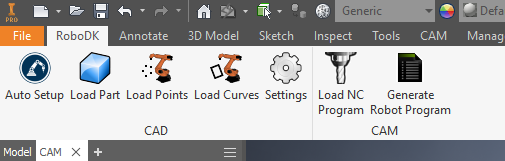
La barra degli strumenti predefinita di RoboDK include 7 comandi per scopi CAD e CAM:
● Configurazione automatica - Questo pulsante le permette di selezionare qualsiasi geometria (curve o punti) che verrà caricata in RoboDK insieme al modello 3D.
● Carica parte - Carica il modello 3D da Inventor a RoboDK. Le caratteristiche come le curve o i punti non saranno caricati
● Carica punto/i - Carica tutti i punti selezionati in RoboDK come nuovo oggetto. Tutte le superfici selezionate saranno utilizzate per calcolare le normali dei punti. Queste norme sono importanti in quanto definiscono l'asse di avvicinamento del robot.
● Carica curva/e - Carica tutte le curve selezionate in RoboDK come un nuovo elemento. Tutte le superfici selezionate saranno utilizzate per calcolare le norme delle curve. Queste norme sono importanti perché definiranno l'asse di avvicinamento del robot.
●Carica programma NC - Carica il progetto di lavorazione in RoboDK. Se si utilizzano più utensili per la lavorazione, RoboDK dividerà il programma per avere un progetto di impostazioni per ogni utensile. Questo comportamento può essere modificato in Strumenti-Opzioni-CAM.
● Genera programma robot - Genera tutti i programmi disponibili nel progetto RoboDK.
La differenza principale tra Auto Setup e Load Curve(s) o Load Point(s) è che Auto Setup carica la parte e crea un nuovo progetto Curve/Punti. L'uso di Load Curve(s) o Load Point(s) è più veloce e si limita ad aggiornare le caratteristiche geometriche esistenti in RoboDK, mantenendo le impostazioni definite in precedenza.
Suggerimento: utilizzando le impostazioni predefinite, se desidera caricare più di un oggetto da Inventor, deve rinominare gli oggetti una volta caricati in RoboDK.