Aggiorna le operazioni selezionate
Selezioni Aggiorna operazioni selezionate per generare il percorso utensile delle operazioni selezionate e simularle in RoboDK.
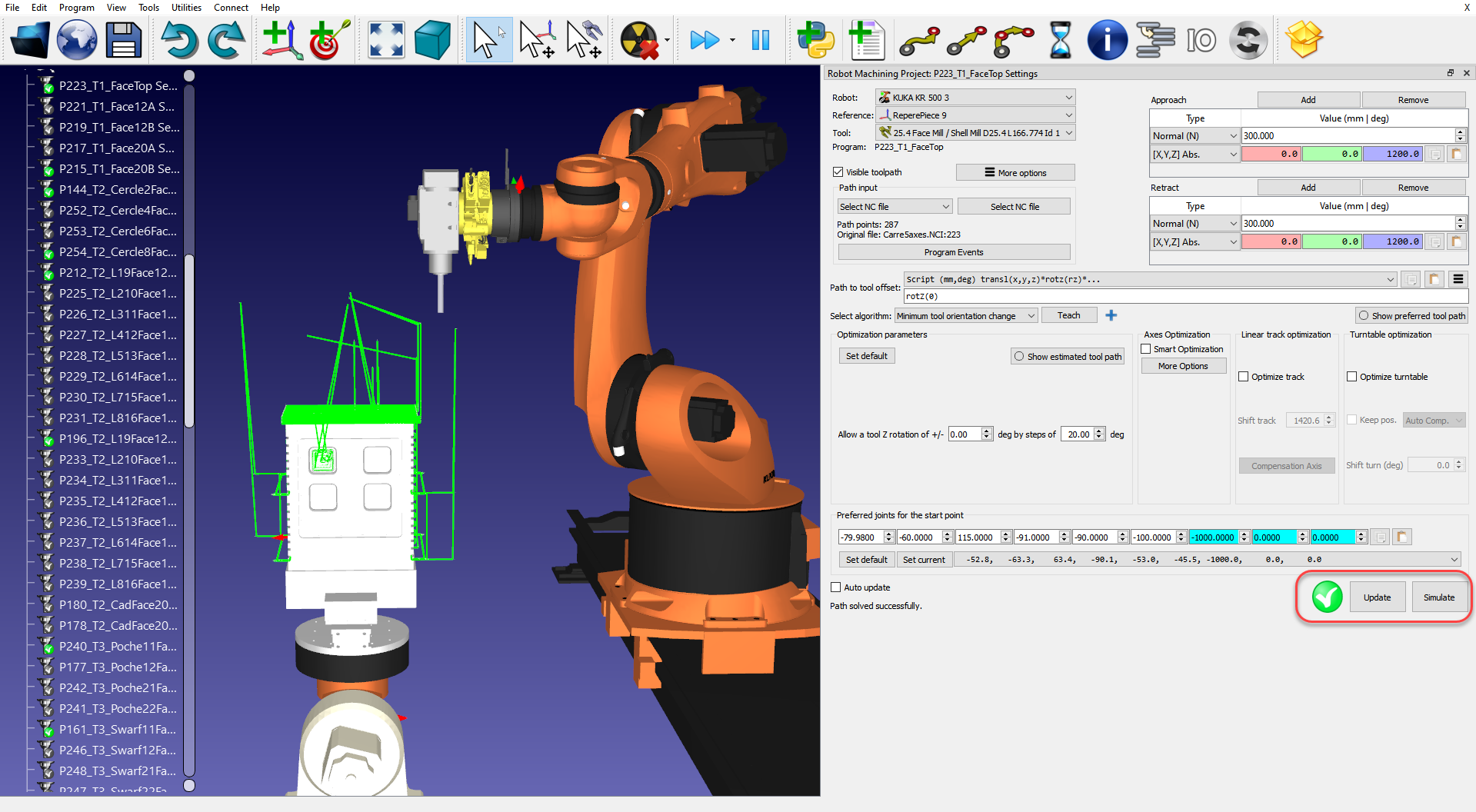
Questa azione caricherà i percorsi utensile selezionati in RoboDK per la lavorazione del robot. Per impostazione predefinita, ogni operazione di lavorazione sarà suddivisa in un programma robotico separato.
Verrà visualizzato un segno di spunta verde se il programma è fattibile con il robot selezionato. Se ci sono problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso con un messaggio del problema.
Clicchi due volte sul progetto di lavorazione del robot
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per ottenere il programma robot che deve essere caricato sul controller robot. Maggiori informazioni su come generare i programmi del robot sono disponibili nella sezione sezione programmazione offline.
Se necessario, faccia clic con il pulsante destro del mouse su un programma e selezioni Post Processor per cambiare il Post Processor. Questo passaggio può aiutarla a personalizzare l'aspetto del codice generato. Maggiori informazioni sulla selezione e la personalizzazione dei post processor sono disponibili nella sezione sezione post-processori.
Ad esempio, quando si utilizza un robot KUKA, RoboDK genera utilizza automaticamente il post processor per i robot KRC2 (chiamato KUKA KRC2), ma se ha un KRC4 può scegliere il post processor KUKA KRC4.