Barra degli strumenti
Quando apre il software Mastercam, dovrebbe vedere una scheda della barra degli strumenti RoboDK. Selezioni questa scheda RoboDK per vedere le opzioni disponibili per impostare il suo progetto di fresatura robotizzata in RoboDK.
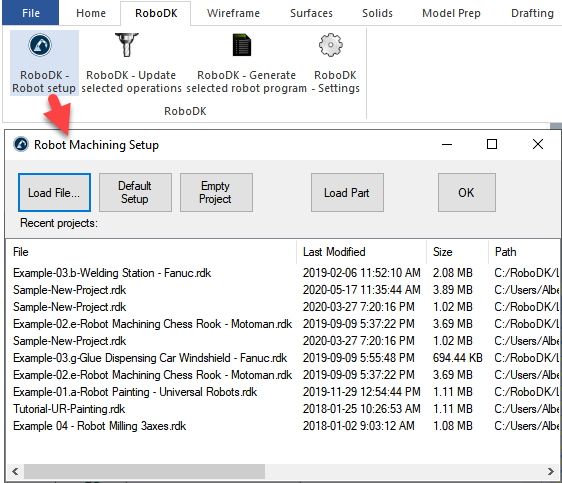
Impostazione del robot
Il pulsante Impostazione robot
●Carica file...: Selezioni un file per aprirlo con RoboDK e utilizzarlo come progetto predefinito per il suo progetto Mastercam.
●Impostazione predefinita: Imposta una nuova stazione con un robot, un mandrino e un piano di riferimento predefiniti. La parte verrà esportata automaticamente in RoboDK.
●Progetto vuoto: Apra RoboDK con una nuova stazione vuota per consentire all'utente di costruire una nuova configurazione. Maggiori informazioni per impostare un nuovo progetto da zero sono disponibili in sezione iniziale.
●Carica parte: Carica la parte da Mastercam a RoboDK (la parte sarà salvata come file STL e caricata automaticamente). Verranno caricati tutti i solidi e le superfici visibili.
Visiti la sezione sezione di fresatura robotica per maggiori informazioni sulla creazione di un nuovo setup.
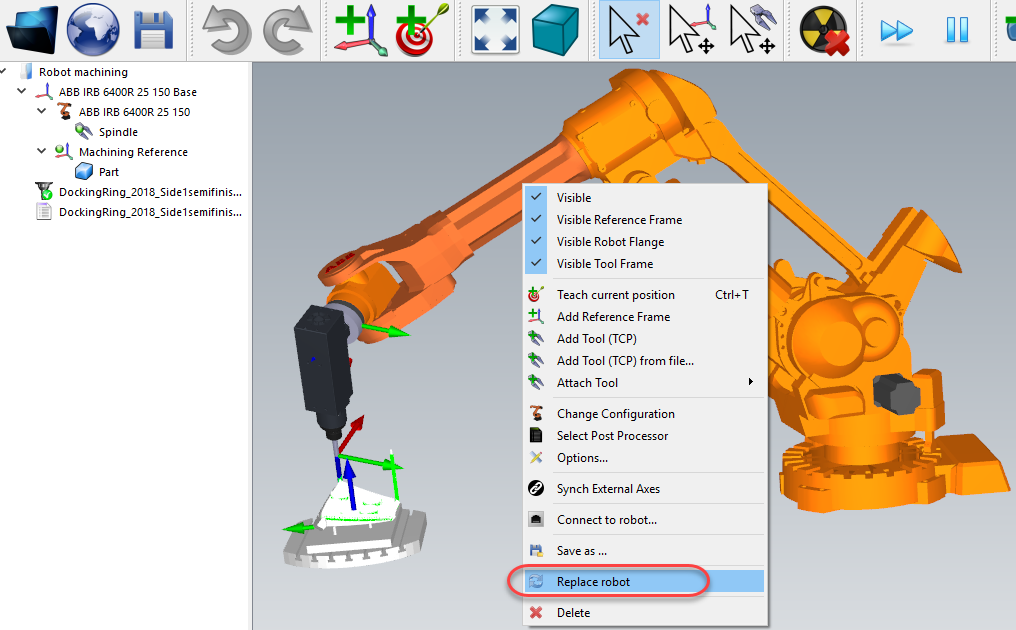
Può facilmente cambiare il robot, modificare l'utensile e/o il piano di riferimento. A titolo di esempio, segua la seguente procedura per cambiare il robot:
1.Clicchi con il tasto destro del mouse sul robot
2.Selezioni Sostituisci robot (come mostrato nell'immagine).
3.Seleziona il nuovo robot
Il programma di installazione di RoboDK fornisce solo alcuni robot di default, tuttavia è possibile scaricare altri robot dalla libreria online.
Maggiori informazioni sull'aggiunta di uno strumento robot sono disponibili nella sezione sezione iniziale.
Tenga premuto Alt+Shift per spostare uno strumento del robot (TCP). Questo è utile per impostare la posa del robot prima di insegnare un bersaglio.
Salvi il progetto per mantenere le modifiche, selezionando File➔ Salva stazione (Ctrl+S).
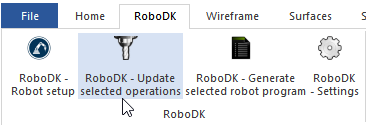
Aggiorna le operazioni selezionate
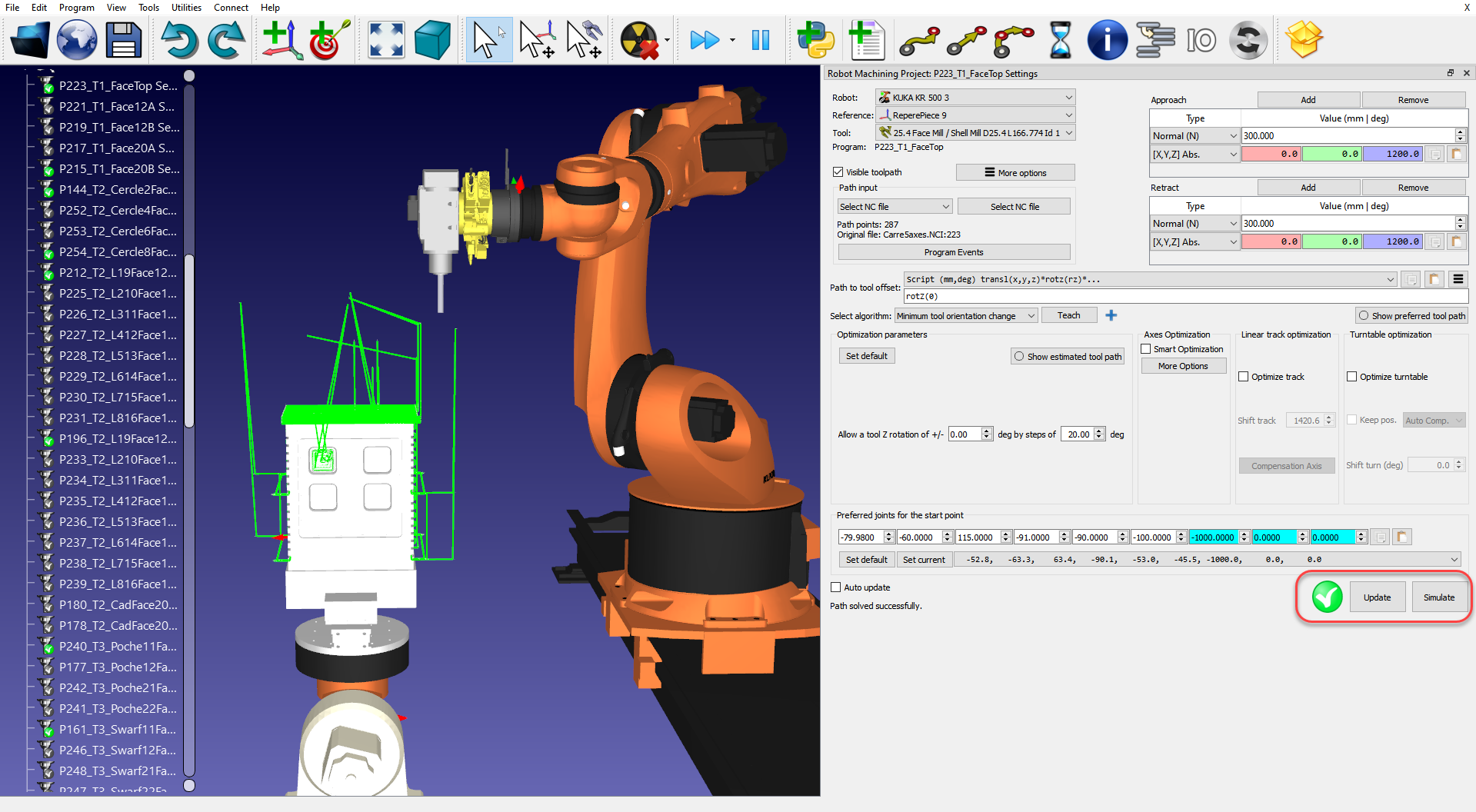
Selezioni Aggiorna operazioni selezionate per generare il percorso utensile delle operazioni selezionate e simularle in RoboDK.
Questa azione caricherà i percorsi utensile selezionati in RoboDK per la lavorazione del robot. Per impostazione predefinita, ogni operazione di lavorazione sarà suddivisa in un programma robotico separato.
Verrà visualizzato un segno di spunta verde se il programma è fattibile con il robot selezionato. Se ci sono problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso con un messaggio del problema.
Clicchi due volte sul progetto di lavorazione del robot
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per ottenere il programma robot che deve essere caricato sul controller robot. Maggiori informazioni su come generare i programmi del robot sono disponibili nella sezione sezione programmazione offline.
Se necessario, faccia clic con il pulsante destro del mouse su un programma e selezioni Post Processor per cambiare il Post Processor. Questo passaggio può aiutarla a personalizzare l'aspetto del codice generato. Maggiori informazioni sulla selezione e la personalizzazione dei post processor sono disponibili nella sezione sezione post-processori.
Ad esempio, quando si utilizza un robot KUKA, RoboDK genera utilizza automaticamente il post processor per i robot KRC2 (chiamato KUKA KRC2), ma se ha un KRC4 può scegliere il post processor KUKA KRC4.
Generare programmi robotici da Mastercam
Può generare programmi robotici direttamente da Mastercam, una volta che la sua stazione RoboDK è pronta. A tale scopo, selezioni Genera programma robot selezionato
RoboDK non verrà visualizzato a meno che non ci siano problemi con il programma. Questa opzione può essere utilizzata anche se RoboDK non è in esecuzione; in questo caso, RoboDK verrà eseguito in background.
Segua questi passaggi in RoboDK per visualizzare o modificare la posizione dei programmi del suo robot:
1.Selezionare Strumenti-Opzioni
2.Selezioni la scheda Programma
3.Selezionare Set nella cartella Programmi del robot
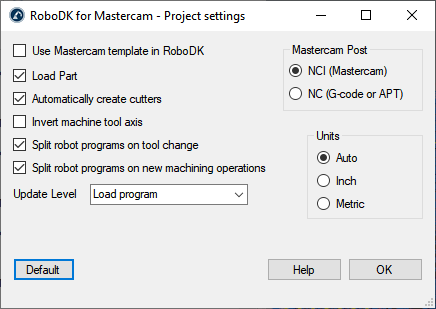
Impostazioni del plugin
Selezioni Impostazioni RoboDK
Tra le altre cose, può modificare le seguenti opzioni:
1.Utilizzi il modello Mastercam invece del modello RoboDK (i modelli di navigazione 3D e di colore in RoboDK corrisponderanno allo stile Mastercam). In RoboDK, si assicuri di deselezionare Ignora la modifica delle impostazioni da applicazioni di terze parti nel menu Strumenti➔ Opzioni➔ Altro per consentire questo modello in RoboDK.
2.Carica e aggiorna la parte in RoboDK ogni volta che pubblica una nuova operazione di lavorazione. Verranno caricati solo i solidi e le superfici visibili.
3.Creare automaticamente le frese degli utensili. In questo caso, i nuovi utensili saranno creati automaticamente rispetto al primo utensile del robot (portautensili) e il TCP sarà sfalsato dalla lunghezza complessiva dell'utensile rispetto al portautensili.
4.Selezionando l'opzione Inverti l'asse della macchina utensile, potrà tenere conto automaticamente del fatto che l'asse Z dell'utensile punta verso il lato interno dell'utensile (invece di puntare verso l'esterno).
5.Utilizzi i file NC (come APT o G-code) invece dei file NCI. RoboDK può leggere i seguenti file per generare simulazioni e programmi di robot:
a.File NCI (opzione predefinita): Carica il percorso utensile nativo di Mastercam in RoboDK. Questo è il metodo preferito per la maggior parte delle operazioni.
b.File NC (file di codice G). Consente di caricare cicli di foratura in scatola (a mano lunga) utilizzando la definizione della macchina RoboDK.