Impostazione del robot
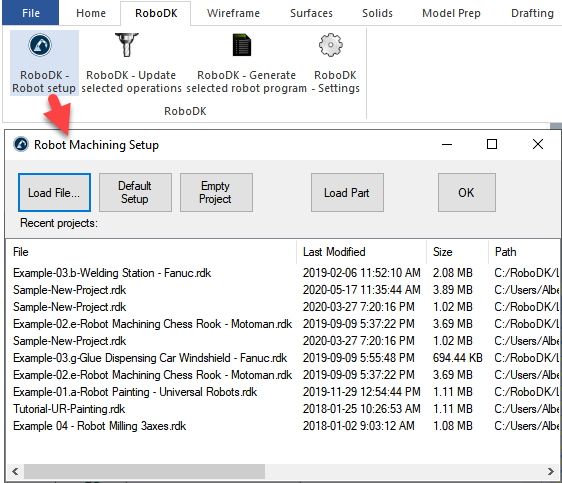
Il pulsante Impostazione robot
●Carica file...: Selezioni un file per aprirlo con RoboDK e utilizzarlo come progetto predefinito per il suo progetto Mastercam.
●Impostazione predefinita: Imposta una nuova stazione con un robot, un mandrino e un piano di riferimento predefiniti. La parte verrà esportata automaticamente in RoboDK.
●Progetto vuoto: Apra RoboDK con una nuova stazione vuota per consentire all'utente di costruire una nuova configurazione. Maggiori informazioni per impostare un nuovo progetto da zero sono disponibili in sezione iniziale.
●Carica parte: Carica la parte da Mastercam a RoboDK (la parte sarà salvata come file STL e caricata automaticamente). Verranno caricati tutti i solidi e le superfici visibili.
Visiti la sezione sezione di fresatura robotica per maggiori informazioni sulla creazione di un nuovo setup.
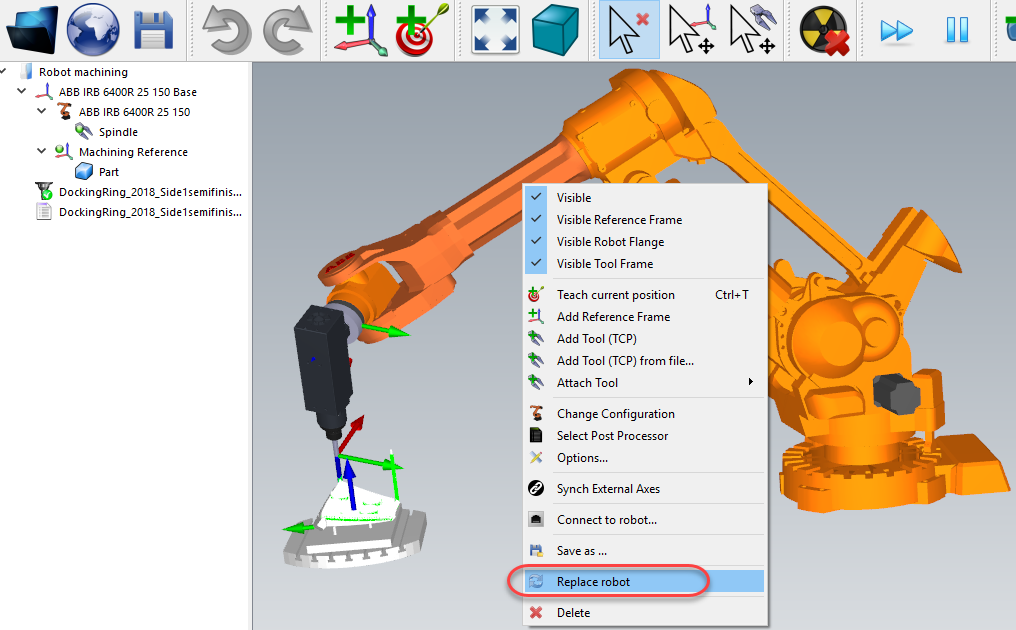
Può facilmente cambiare il robot, modificare l'utensile e/o il piano di riferimento. A titolo di esempio, segua la seguente procedura per cambiare il robot:
1.Clicchi con il tasto destro del mouse sul robot
2.Selezioni Sostituisci robot (come mostrato nell'immagine).
3.Seleziona il nuovo robot
Il programma di installazione di RoboDK fornisce solo alcuni robot di default, tuttavia è possibile scaricare altri robot dalla libreria online.
Maggiori informazioni sull'aggiunta di uno strumento robot sono disponibili nella sezione sezione iniziale.
Tenga premuto Alt+Shift per spostare uno strumento del robot (TCP). Questo è utile per impostare la posa del robot prima di insegnare un bersaglio.
Salvi il progetto per mantenere le modifiche, selezionando File➔ Salva stazione (Ctrl+S).