Impostazioni del plugin
Selezioni Impostazioni RoboDK
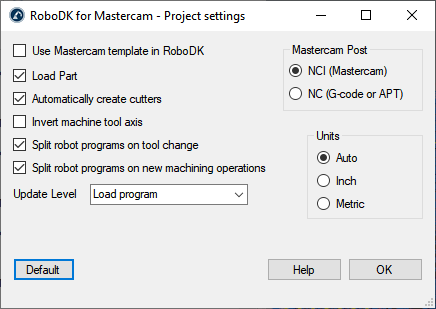
Tra le altre cose, può modificare le seguenti opzioni:
1.Utilizzi il modello Mastercam invece del modello RoboDK (i modelli di navigazione 3D e di colore in RoboDK corrisponderanno allo stile Mastercam). In RoboDK, si assicuri di deselezionare Ignora la modifica delle impostazioni da applicazioni di terze parti nel menu Strumenti➔ Opzioni➔ Altro per consentire questo modello in RoboDK.
2.Carica e aggiorna la parte in RoboDK ogni volta che pubblica una nuova operazione di lavorazione. Verranno caricati solo i solidi e le superfici visibili.
3.Creare automaticamente le frese degli utensili. In questo caso, i nuovi utensili saranno creati automaticamente rispetto al primo utensile del robot (portautensili) e il TCP sarà sfalsato dalla lunghezza complessiva dell'utensile rispetto al portautensili.
4.Selezionando l'opzione Inverti l'asse della macchina utensile, potrà tenere conto automaticamente del fatto che l'asse Z dell'utensile punta verso il lato interno dell'utensile (invece di puntare verso l'esterno).
5.Utilizzi i file NC (come APT o G-code) invece dei file NCI. RoboDK può leggere i seguenti file per generare simulazioni e programmi di robot:
a.File NCI (opzione predefinita): Carica il percorso utensile nativo di Mastercam in RoboDK. Questo è il metodo preferito per la maggior parte delle operazioni.
b.File NC (file di codice G). Consente di caricare cicli di foratura in scatola (a mano lunga) utilizzando la definizione della macchina RoboDK.