Taglio robotico a 5 assi
Questo esempio mostra come creare un progetto di taglio robotico a 5 assi utilizzando il plugin Mastercam.
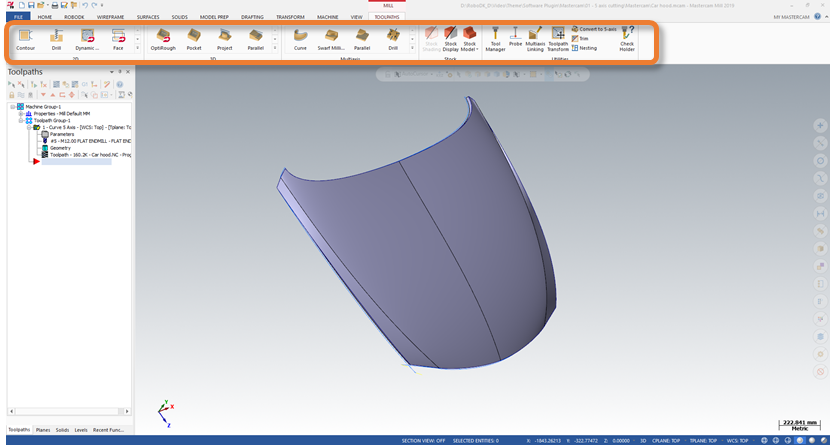
1.Carica la parte in Mastercam.
2.Creare il percorso utensile utilizzando gli strumenti di Mastercam Mill.
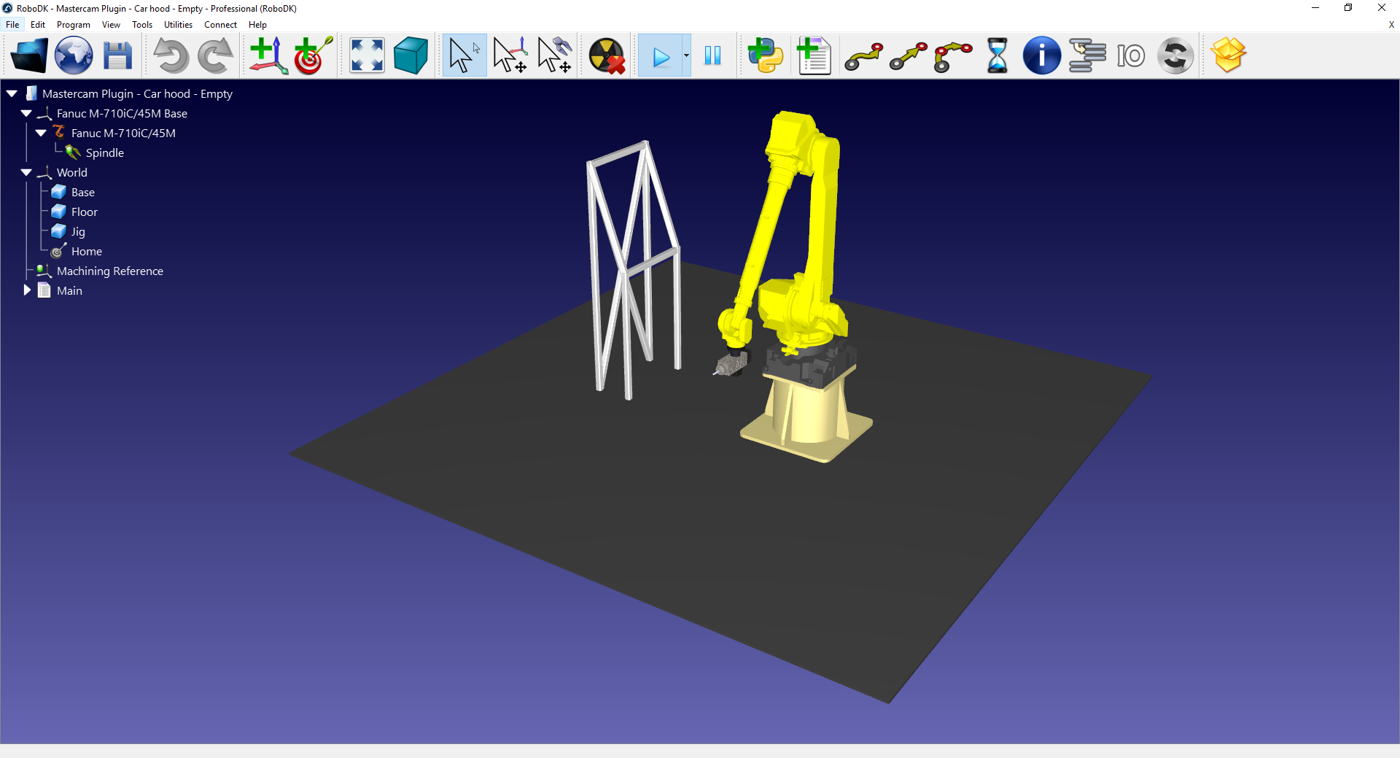
3.Crei una stazione in RoboDK con il suo robot, il suo mandrino e qualsiasi altro oggetto necessario.
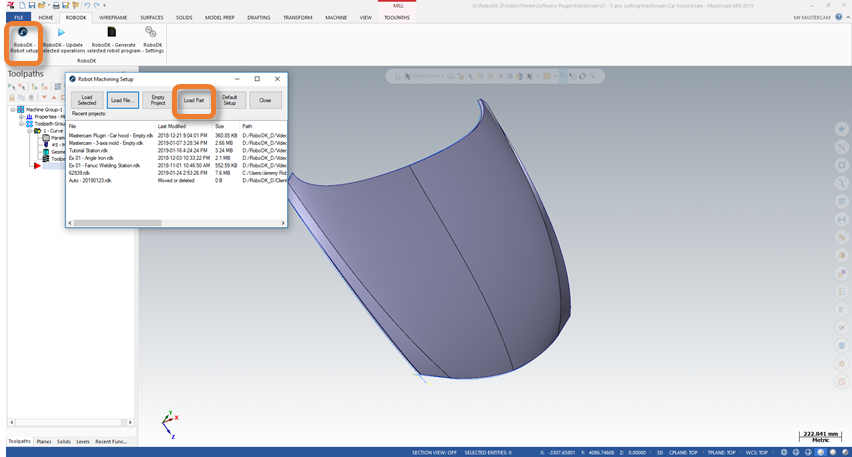
4.Nella scheda plugin RoboDK, selezioni RoboDK➔ Configurazione del robot.
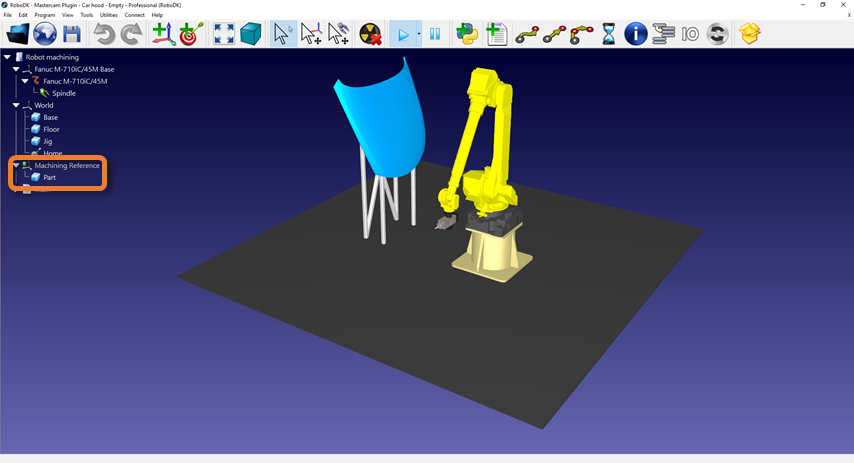
5.Nella finestra Impostazione lavorazione robot, selezionare Carica pezzo.
6.In RoboDK, regoli la posizione del piano di riferimento di lavorazione, se necessario. Tenga premuto il tasto Alt e sposti il riferimento con le frecce usando il cursore per riposizionare la parte davanti al robot.
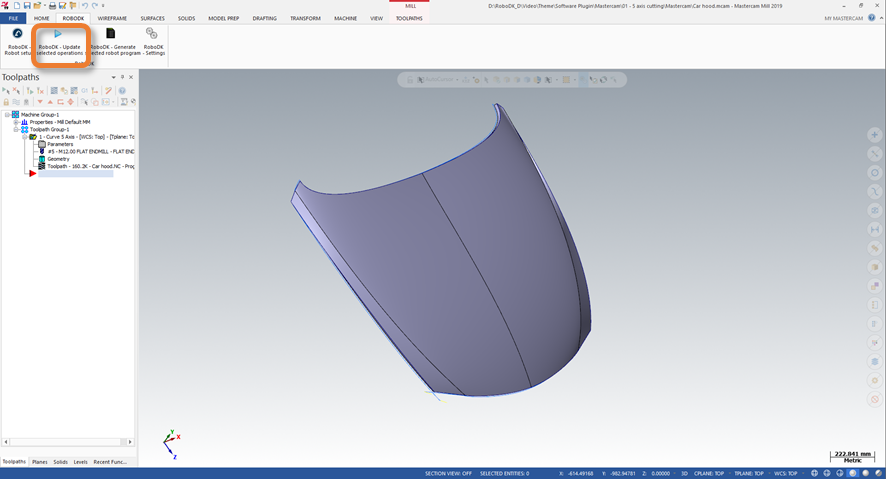
7.Nella scheda plugin RoboDK, selezioni RoboDK➔ Aggiorna le operazioni selezionate.
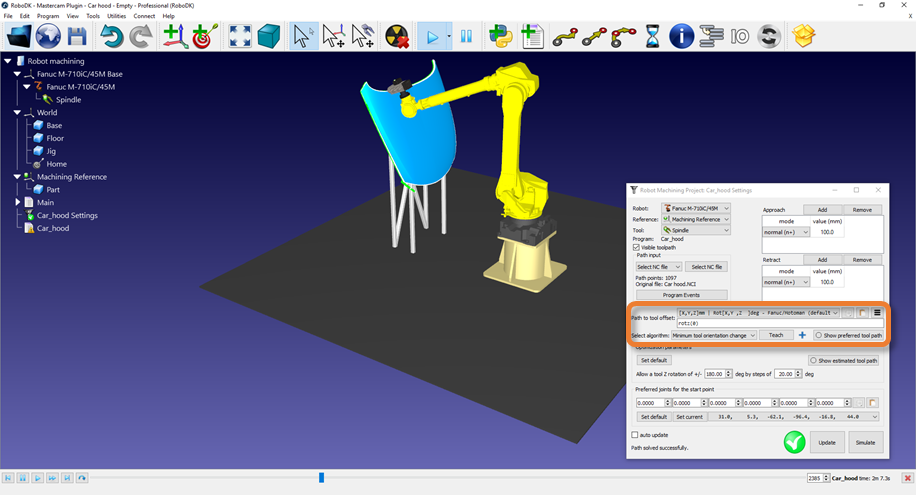
8.In RoboDK, selezioni Aggiornamento e Simulazione nella finestra Progetto di lavorazione robot.
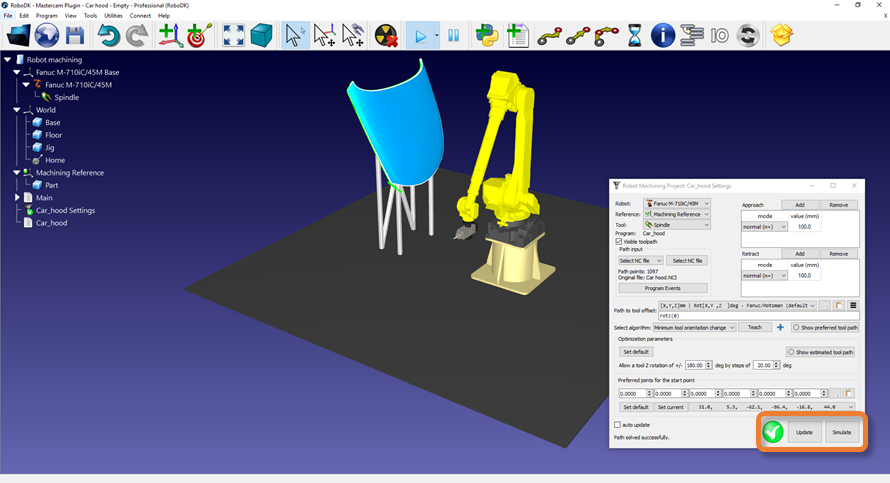
9.Modifichi l'orientamento dello strumento lungo il percorso, se necessario. Tenga premuto il tasto Alt e orienti l'utensile intorno alle frecce dell'asse Z, utilizzando il cursore. Selezioni il pulsante Insegna per impostare la posa desiderata per il percorso. Selezioni Aggiorna per ricalcolare il percorso utilizzando questa nuova posa. Selezioni Simulazione per simulare il percorso modificato.