RoboDK Plugin for MecSoft
Introduzione
L'add-in RoboDK per il software MecSoft le permette di impostare rapidamente progetti di fresatura robotizzata direttamente da RhinoCAM e Visual CAD/CAM. Con l'integrazione RoboDK per il software CAD/CAM MecSoft, può facilmente combinare il software di lavorazione RhinoCAM o Visual CAD/CAM con RoboDK per simulare e programmare bracci robotici industriali per la fresatura robotizzata.
Maggiori informazioni su RoboDK per la lavorazione di robot sono disponibili nella sezione Lavorazione di robot.
Il video seguente mostra una rapida panoramica del plugin RoboDK per RhinoCAM: Il video seguente mostra una rapida panoramica del plugin RoboDK per RhinoCAM: https://youtu.be/iJqovzJO0ic.
Questo documento descrive come impostare il plugin RoboDK per il software Mecsoft e come utilizzare RhinoCAM e Visual CAD/CAM per impostare progetti di fresatura robotizzata in RoboDK.
Impostazione di RhinoCAM
Segua questi passaggi per impostare automaticamente il progetto di lavorazione del robot da RhinoCAM:
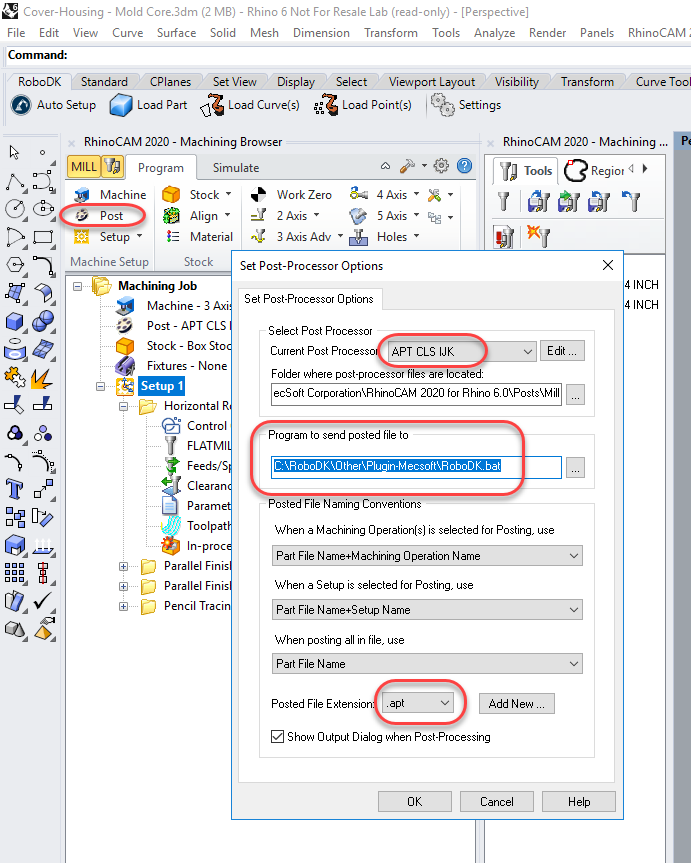
1.Selezioni la scheda Programma nel Browser di lavorazione di RhinoCAM.
2.Seleziona il post
3.Impostare il Post Processor su APT CLS IJK
4.Imposti il programma a cui inviare il file inviato:
C:\RoboDK\Altro\Plugin-MecSoft\RoboDK.bat
5.Selezionare OK
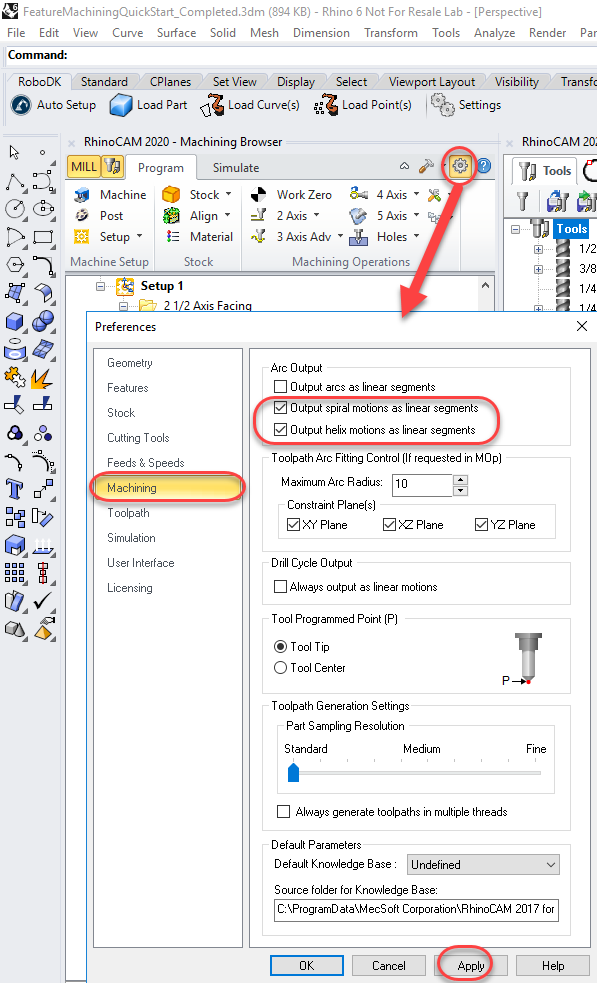
Dovrebbe anche generare eliche e spirali come movimenti lineari (non come comando Helix). I comandi Helix non sono supportati dai robot industriali. Deve seguire la seguente procedura per modificare questa impostazione:
1.Selezioni il pulsante Preferenze CAM (come mostrato nell'immagine seguente).
2.Selezioni la scheda Lavorazione
3.Verifica Movimenti a spirale in uscita come segmenti lineari.
4.Verificare i movimenti elicoidali di uscita come segmenti lineari.
Flusso di lavoro
Questa sezione descrive il comportamento predefinito di RoboDK quando si invia un percorso di lavorazione a RoboDK (come descritto nella sezione precedente).
La pubblicazione di un programma di lavorazione su RoboDK crea automaticamente un nuovo progetto con una cella predefinita pronta per la fresatura robotizzata. La cella include un robot, un utensile e un sistema di coordinate/dato che rappresenta il riferimento di lavorazione del robot.
Se ha già una stazione RoboDK aperta, utilizzerà il progetto RoboDK esistente senza sovrascrivere il robot, l'utensile o il sistema di coordinate.
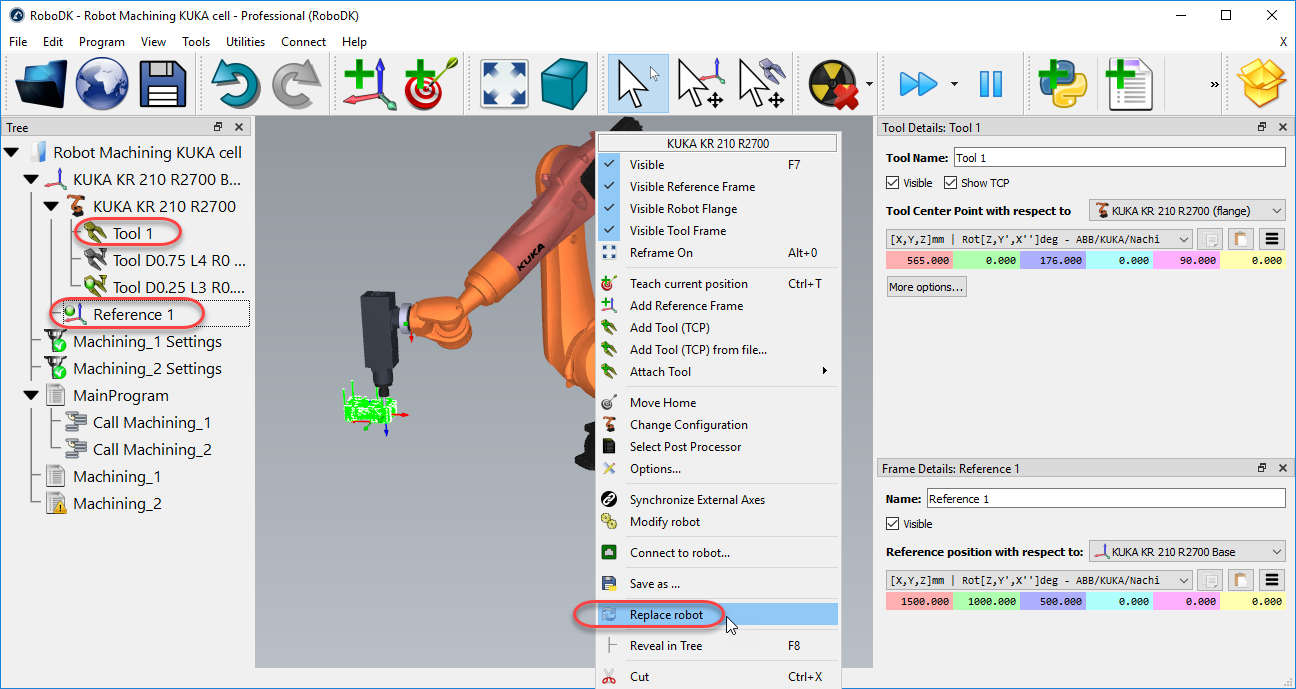
Può facilmente cambiare il robot, modificare l'utensile e/o il piano di riferimento. A titolo di esempio, segua la seguente procedura per cambiare il robot:
1.Clicchi con il tasto destro del mouse sul robot
2.Selezioni Sostituisci robot (come mostrato nell'immagine seguente).
3.Selezioni il robot che desidera utilizzare
Il programma di installazione di RoboDK fornisce solo alcuni robot di default, tuttavia è possibile scaricare altri robot dalla libreria online.
Maggiori informazioni sull'aggiunta di uno strumento robot sono disponibili nella sezione Guida introduttiva.
Salvi il progetto per mantenere le modifiche, selezionando File➔ Salva stazione (Ctrl+S).
Simulare la fresatura robotizzata
Una volta aggiornata la cella del robot, selezioni Utilità➔ Aggiorna progetto di lavorazione robot (Ctrl+U) per aggiornare tutti i programmi. Verrà visualizzato un segno di spunta verde se i programmi sono fattibili con i parametri attuali della cella. Se ci sono dei problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso.
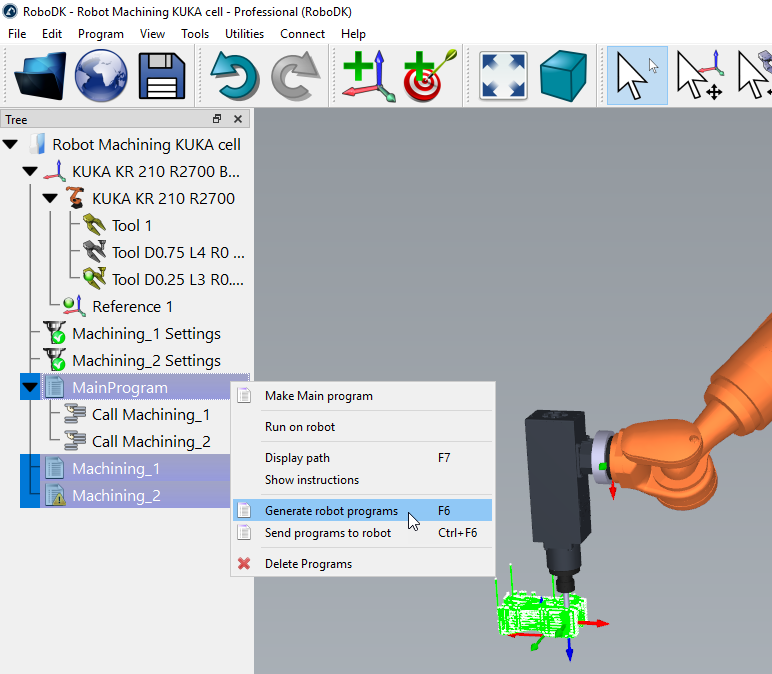
Clicchi due volte sul progetto di lavorazione robot
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per generare il programma robot per il suo controller robot. Maggiori informazioni su come generare i programmi robot sono disponibili nella sezione Programmazione offline.
Può anche fare clic con il pulsante destro del mouse su un programma e selezionare Seleziona post processor per cambiare il post processor. Maggiori informazioni sui processori di post sono disponibili nella sezione processori di postdedicata ai .
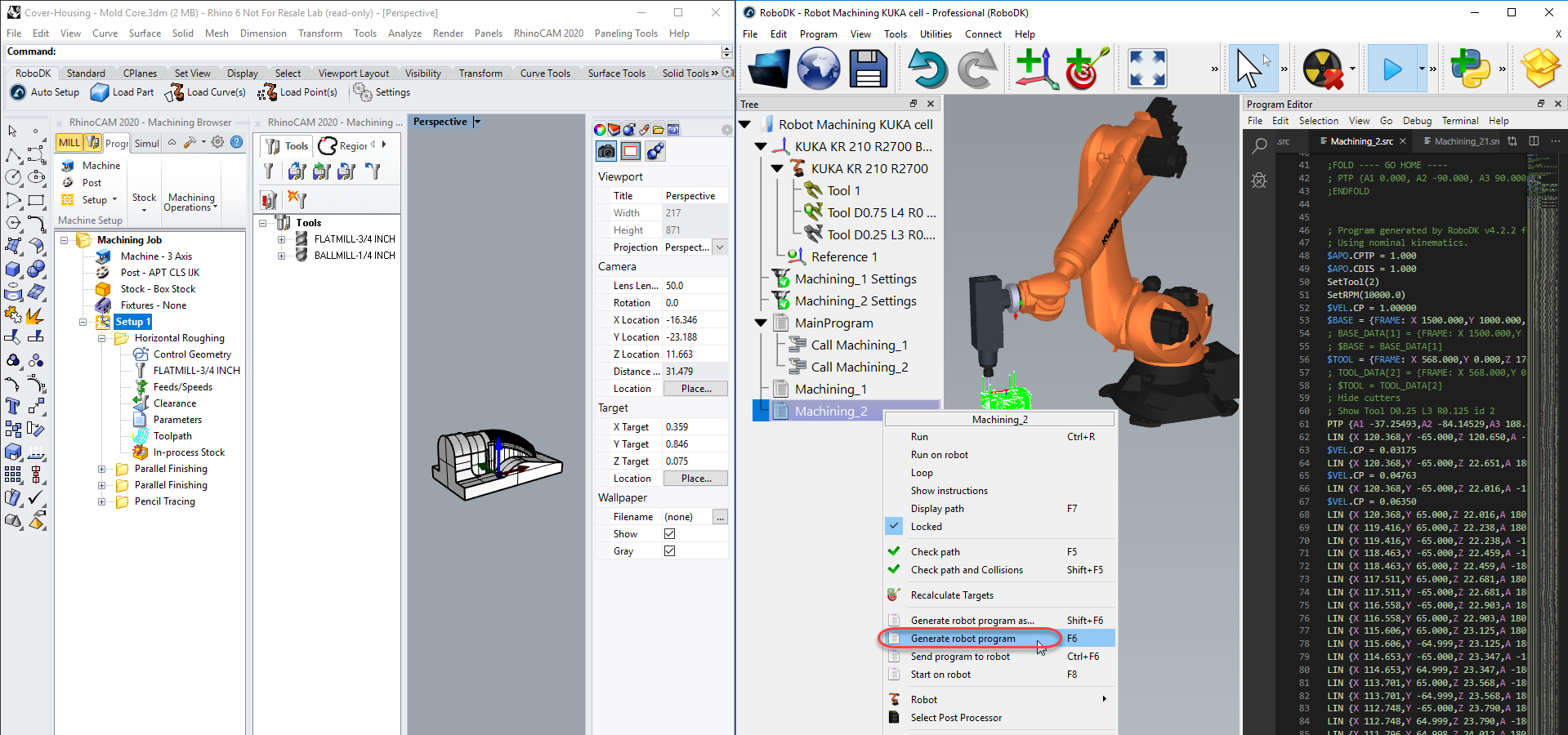
Genera programmi robotici
Clicchi con il tasto destro del mouse su un programma in RoboDK e selezioni Genera programma robot (F6) per generare i programmi robotici per la lavorazione del robot.
Segua questi passaggi in RoboDK per cambiare la posizione dei suoi programmi robotici salvati:
1.Selezionare Strumenti-Opzioni
2.Seleziona il programma
3.Selezionare Imposta accanto alla cartella Programmi del robot
Esempi di RhinoCAM
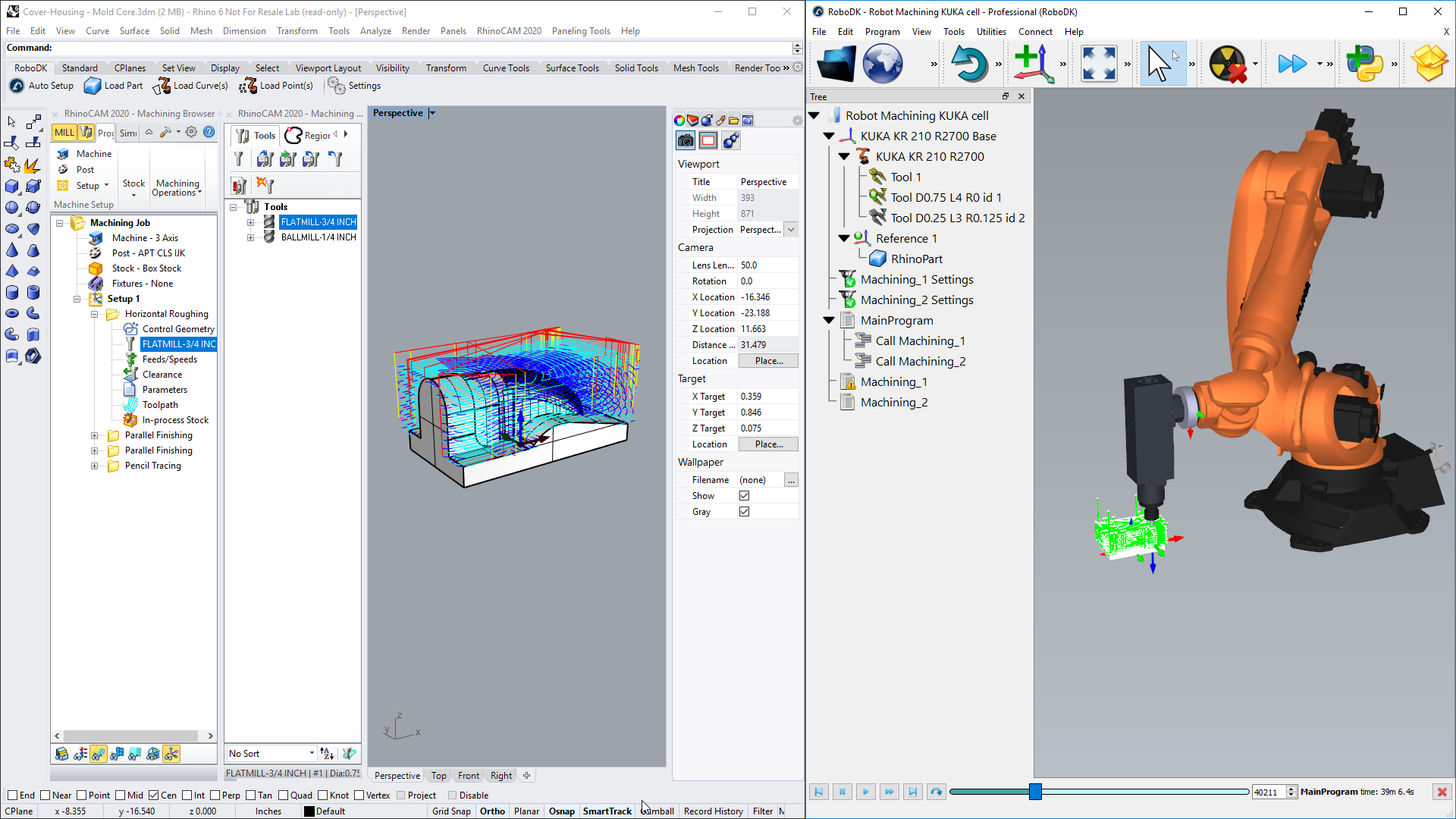
Lavorazione di robot a 3 assi con RhinoCAM
Questo esempio mostra come creare un progetto di fresatura robotizzata a 3 assi utilizzando RhinoCAM e RoboDK.
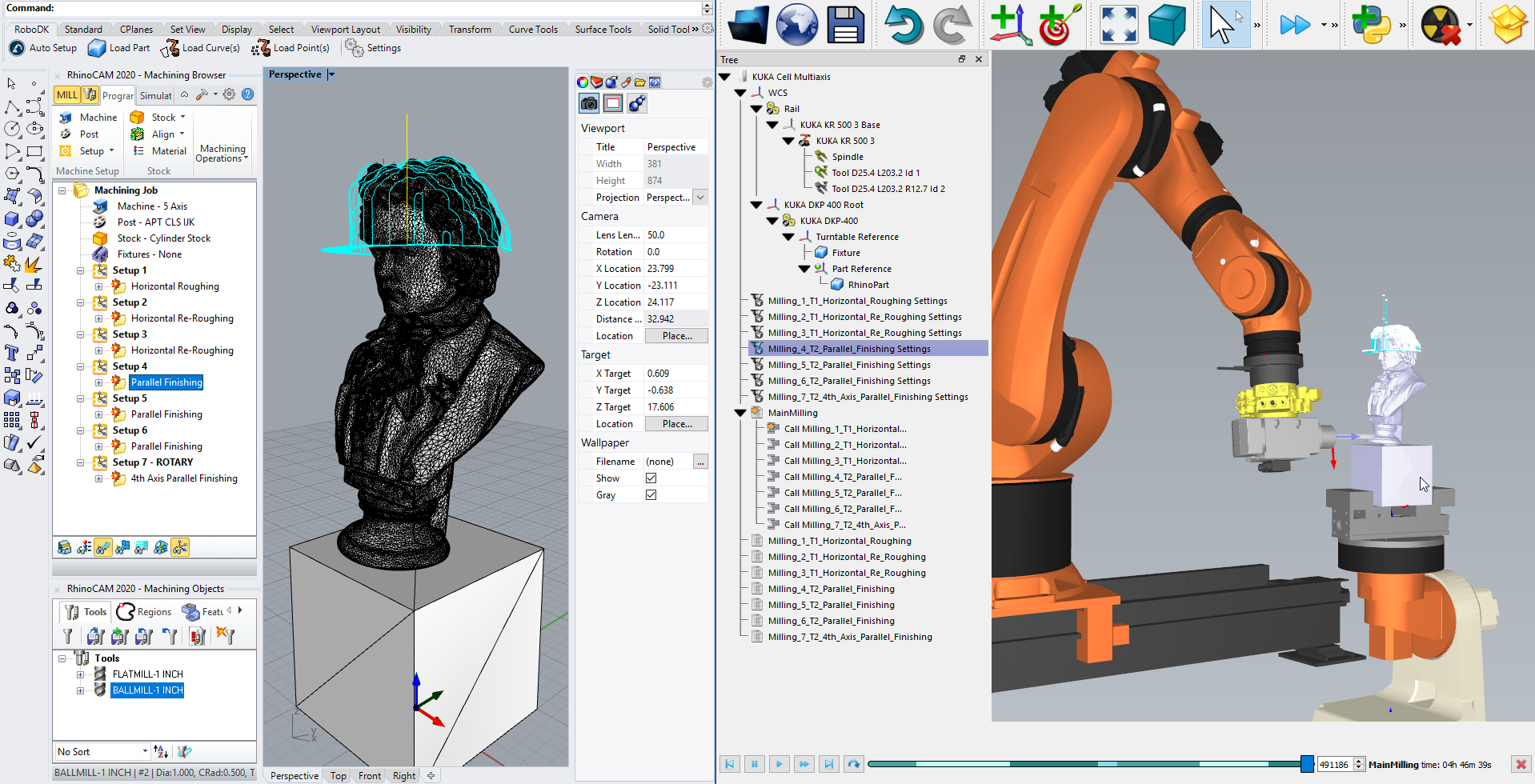
Lavorazione di robot a 5 assi con RhinoCAM
Questo esempio mostra come creare un progetto di fresatura robotizzata a 5 assi per la scultura utilizzando RhinoCAM e RoboDK. Questo progetto utilizza un robot KUKA sincronizzato con una guida lineare e una tavola rotante a due assi (9 assi sincronizzati).