Il plug-in RoboDK per Rhino include 3 componenti Grasshopper:
● Da curva a robot (Crv2Rob) - Carica una curva (C) o un gruppo di curve in RoboDK. Opzionalmente, possono essere fornite una o più superfici (S) per estrarre le normali della superficie per ogni punto della curva.
● Da file a robot (File2Rob) - Carica un file (F) in RoboDK. È necessario fornire il percorso di tale file. RoboDK supporta il caricamento di file APT o G-code destinati a scopi di produzione a 5 assi, come la stampa 3D o la fresatura robotizzata. Per maggiori informazioni, legga la sezione fresatura robotizzatasulla .
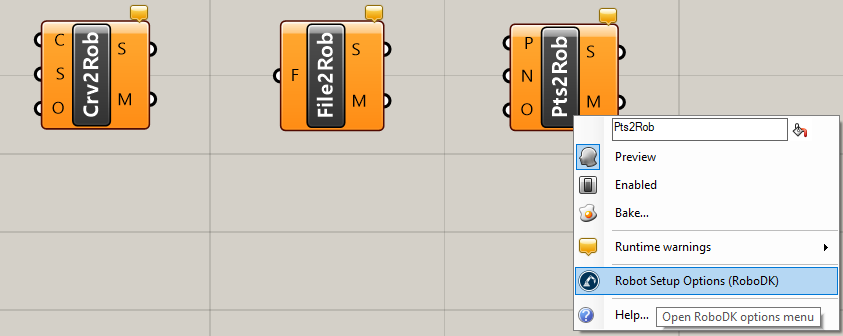
● Punti al robot (Pts2Rob) - Carica un punto (P) o un gruppo di punti in RoboDK. Opzionalmente, può anche fornire i vettori normali corrispondenti (o vettore di avvicinamento) per ogni punto (N).
Tutti i componenti restituiscono uno stato (S) come percentuale (100% significa che il robot può completare il programma con successo). Inoltre, è possibile leggere un messaggio descrittivo (M) da ciascun componente.
Può fare clic con il pulsante destro del mouse su qualsiasi componente e selezionare Opzioni di impostazione del robot (RoboDK) per personalizzare le impostazioni specifiche di un componente.