Esempi
Questa sezione mostra esempi di base per caricare un progetto Rhino in RoboDK per la simulazione del robot e la programmazione offline.
Incisione di una cupola
Strisce a cupola
Questo esempio mostra come caricare una stazione RoboDK campione (configurazione predefinita) e seguire una serie di curve definite in Rhino con il robot.
1.Carichi l'esempio della Cupola in Rhino.
2.Selezioni la scheda RoboDK e selezioni
3.Selezionare Carica progetto...
4.Selezioni l'Impostazione predefinita. RoboDK avvierà e caricherà un progetto campione con un robot KUKA, un utensile (un mandrino come Utensile 1) e un piano di riferimento (Riferimento 1).
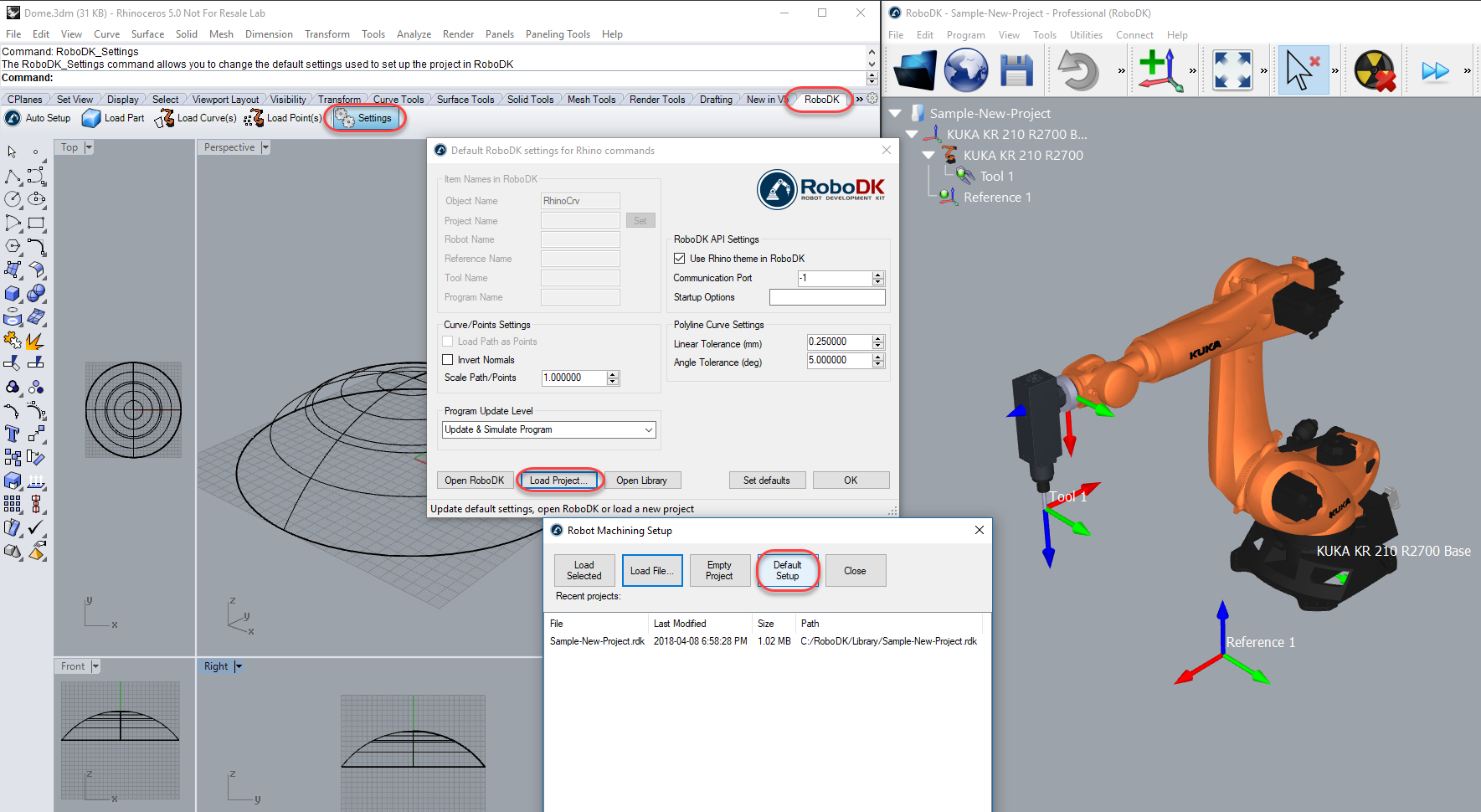
5.Chiudere la finestra Impostazioni o selezionare OK.
6.Selezioni il pulsante
7.Selezioni tutte le curve e le superfici e prema Invio (o clicchi con il tasto destro del mouse). Il progetto verrà caricato in RoboDK come mostrato nell'immagine seguente.
Dovrebbe vedere la parte caricata sul piano di riferimento attivo (Riferimento 1) e un nuovo progetto Curve follow in RoboDK che segue le curve con l'utensile attivo del robot (Utensile 1).
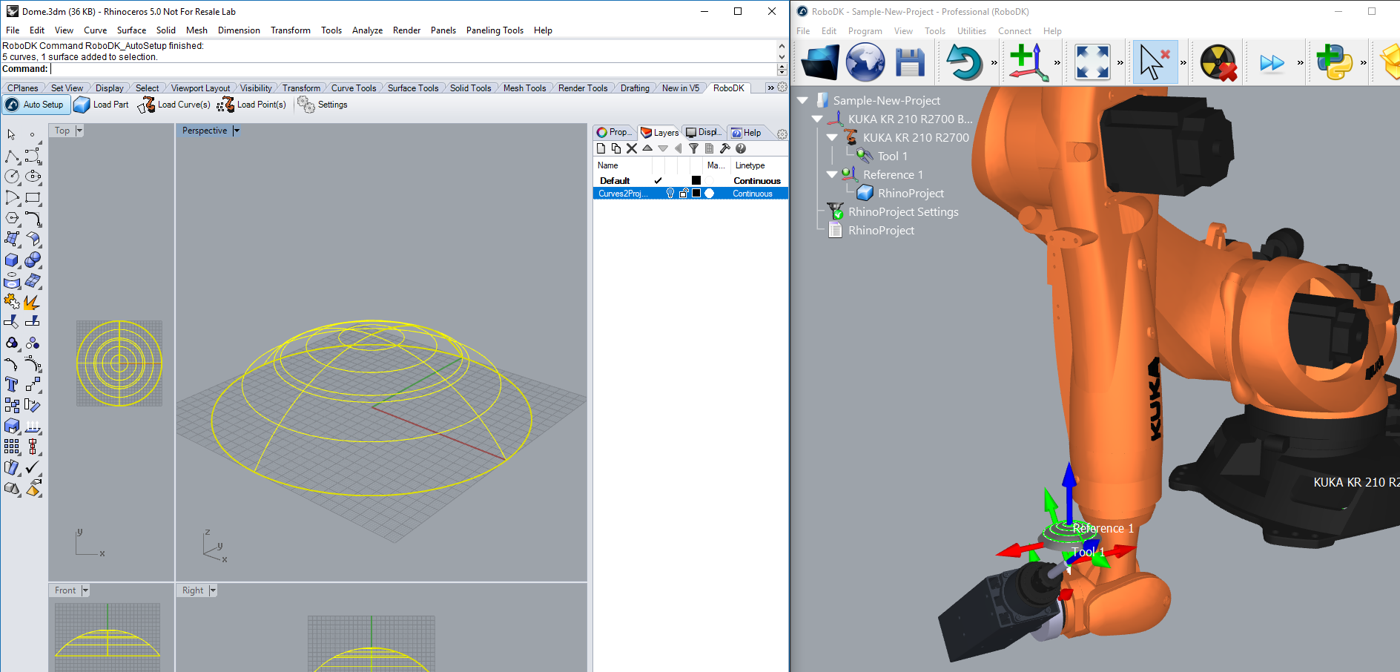
Si può anche vedere che le normali della superficie sono state estratte nella direzione opposta. Segua questi passaggi per risolvere questo problema:
8.Selezioni
9.Selezioni l'opzione Invertire le norme.
10.Selezioni OK.
11.Ripeta i passaggi 6 e 7.
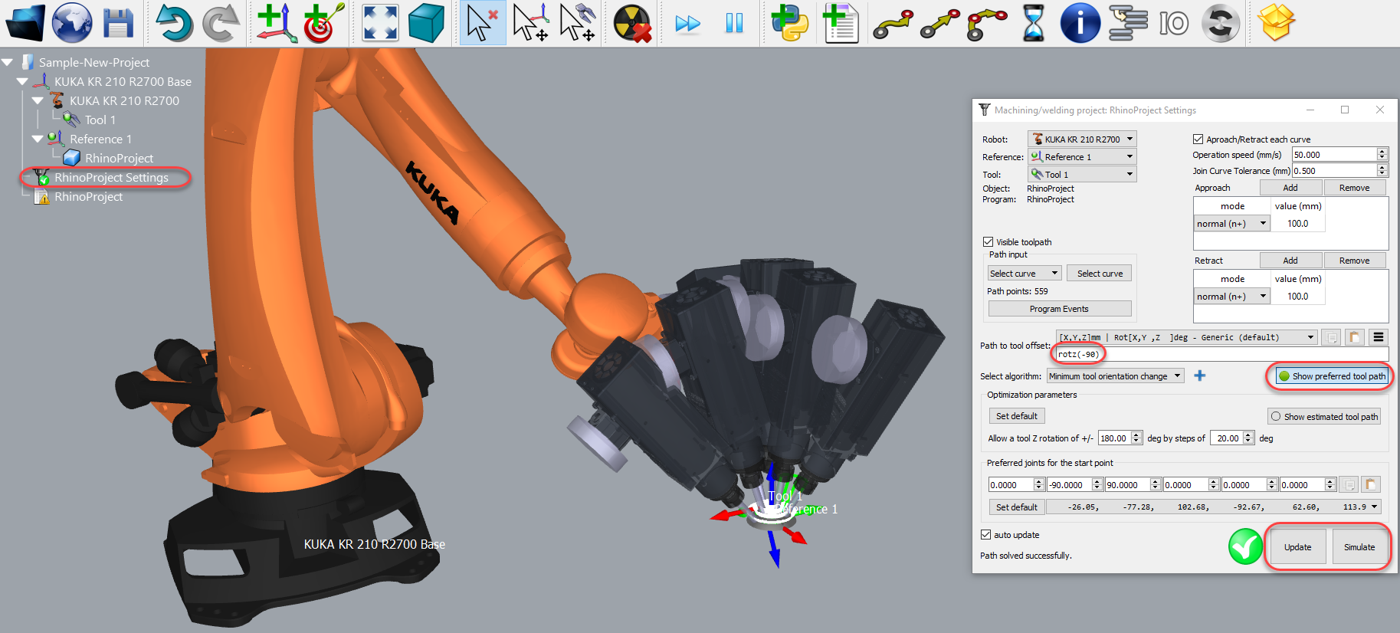
Ora dovrebbe vedere le norme della superficie capovolte e il movimento di avvicinamento proviene dalla parte superiore della parte. Il robot dovrebbe essere in grado di muoversi lungo il percorso utensile senza problemi.
Clicchi due volte su
Ad esempio, può selezionare Mostra percorso utensile preferito per vedere e modificare l'orientamento predefinito dell'utensile rispetto alla parte. Modifichi il valore di offset Percorso utensile per definire una rotazione aggiuntiva. Per farlo, può inserire un nuovo valore o semplicemente usare la rotella del mouse per vedere una rapida anteprima del risultato.
Maggiori informazioni per modificare queste impostazioni sono disponibili nella sezione Lavorazione robot.
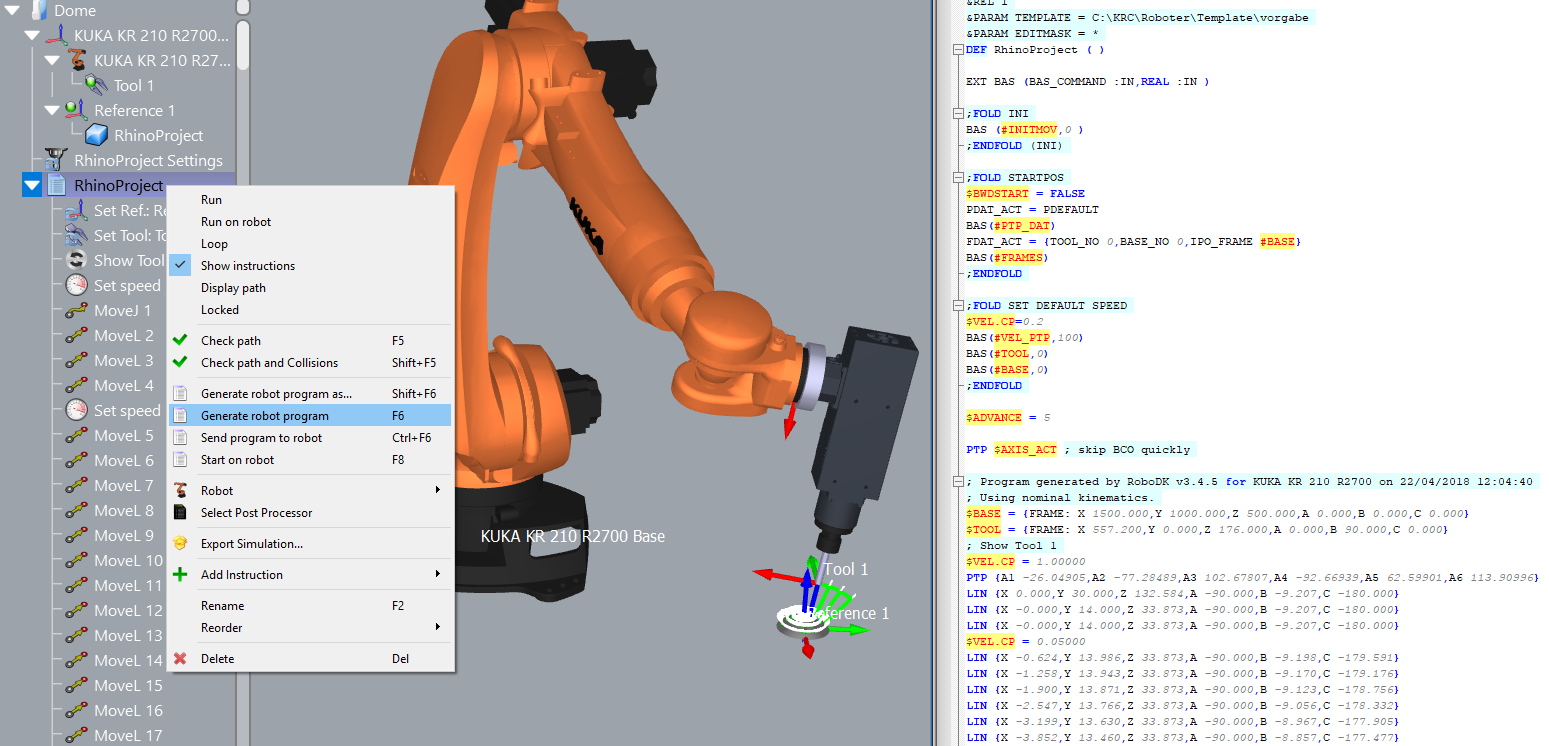
Infine, quando la simulazione produce il risultato desiderato, può generare il programma o esportare la simulazione:
12.Clicchi con il tasto destro del mouse sul programma RhinoProject
13.Selezionare Genera programma robot (F6). Il programma del robot verrà generato e visualizzato.
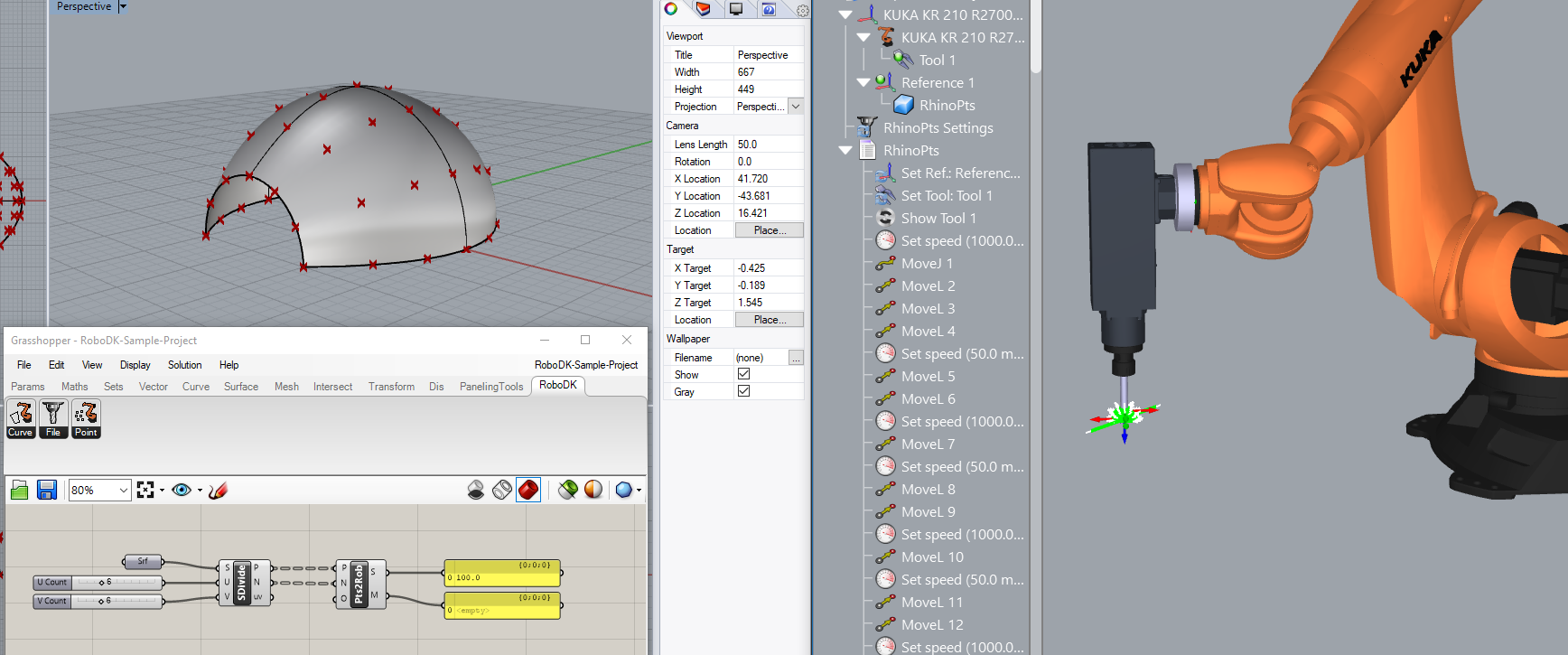
Esempio di Grasshopper
Questo esempio mostra come utilizzare il plug-in RoboDK per Grasshopper, dividendo una superficie come una griglia di punti e seguendoli con un robot per un'operazione di perforazione in RoboDK:
1.Carichi l'esempio di Grasshopper fornito con il plug-in RoboDK (file 3dm e file gh).
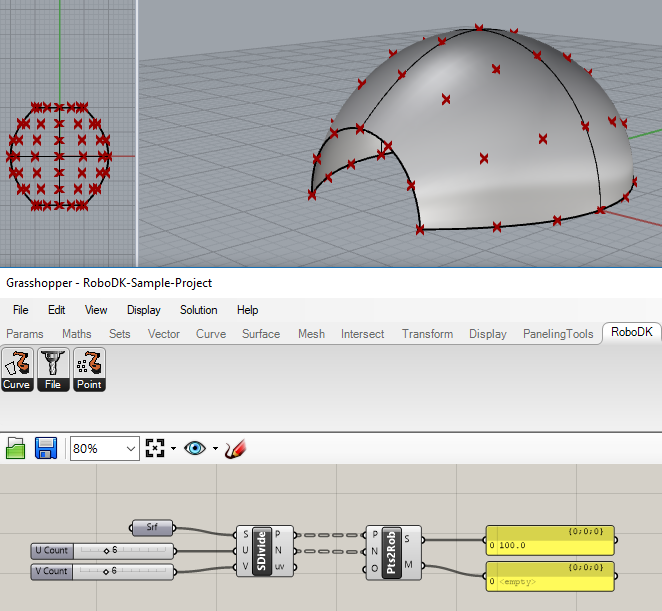
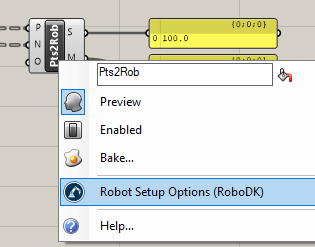
2.Clicchi con il tasto destro del mouse sul componente Pts2Rob e selezioni Opzioni di impostazione robot (RoboDK). Selezioni Carica progetto... e selezioni Impostazione predefinita per caricare una stazione RoboDK campione (lo stesso progetto campione mostrato nella sezione precedente).
Può facoltativamente fornire il nome dell'oggetto come input del componente (O). Può anche specificare un progetto nelle opzioni del componente, in modo che il progetto RoboDK desiderato venga utilizzato con ogni componente.
3.In Grasshopper, selezioni Solution➔ Recompute (F5) per aggiornare la parte e il programma in RoboDK.