Esempio di Grasshopper
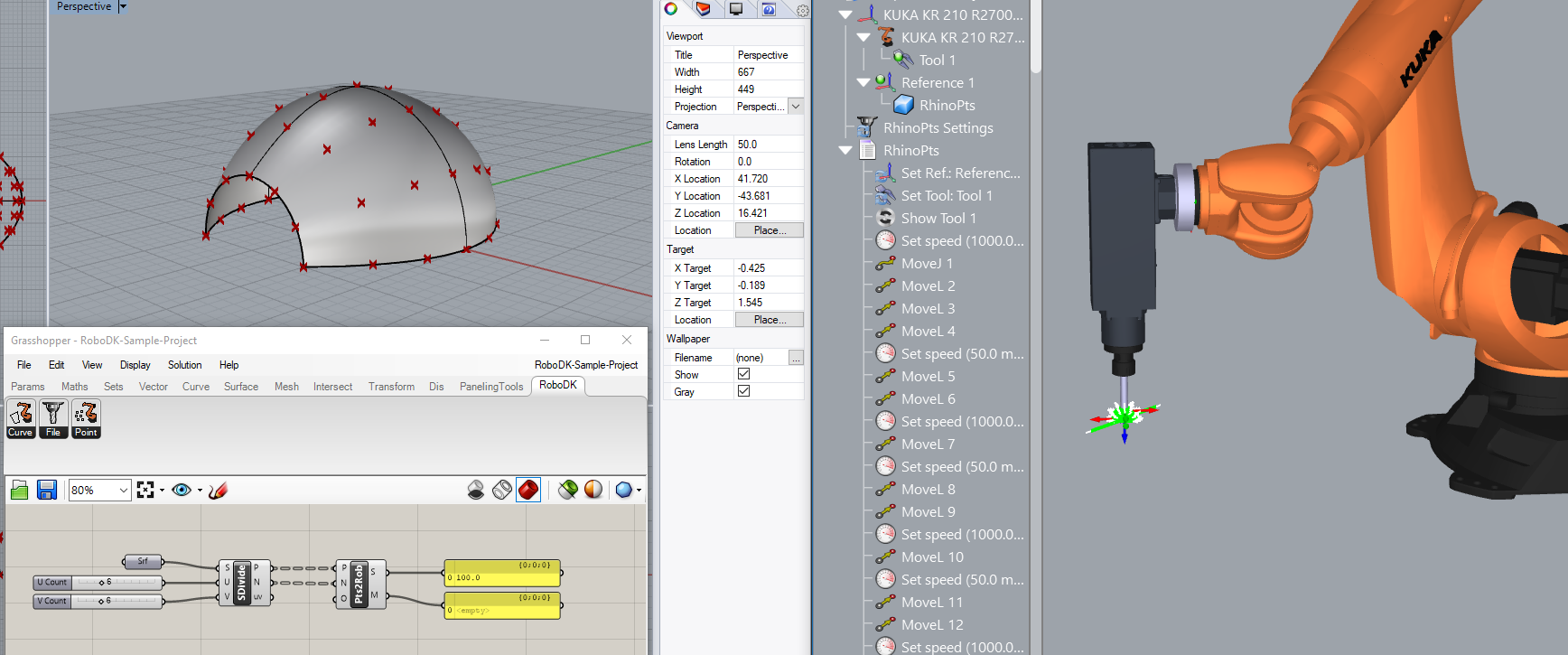
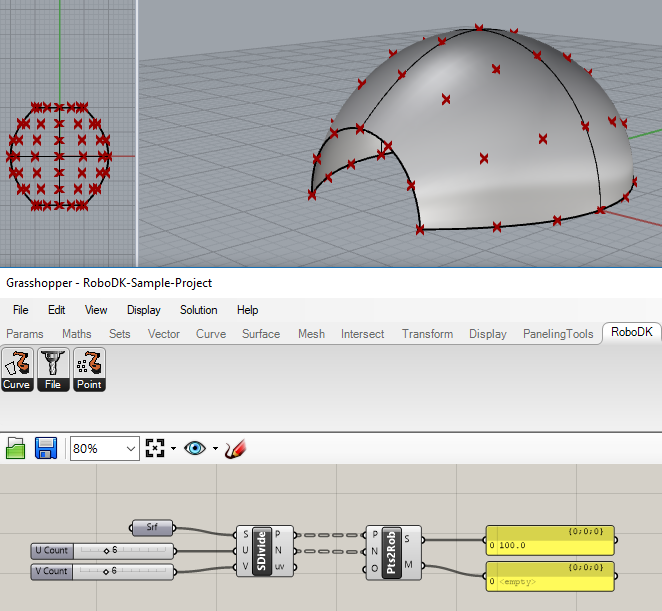
Questo esempio mostra come utilizzare il plug-in RoboDK per Grasshopper, dividendo una superficie come una griglia di punti e seguendoli con un robot per un'operazione di perforazione in RoboDK:
1.Carichi l'esempio di Grasshopper fornito con il plug-in RoboDK (file 3dm e file gh).
2.Clicchi con il tasto destro del mouse sul componente Pts2Rob e selezioni Opzioni di impostazione robot (RoboDK). Selezioni Carica progetto... e selezioni Impostazione predefinita per caricare una stazione RoboDK campione (lo stesso progetto campione mostrato nella sezione precedente).
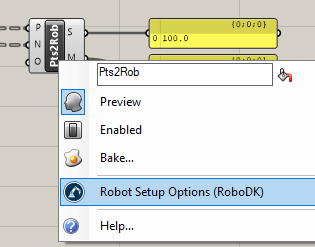
Può facoltativamente fornire il nome dell'oggetto come input del componente (O). Può anche specificare un progetto nelle opzioni del componente, in modo che il progetto RoboDK desiderato venga utilizzato con ogni componente.
3.In Grasshopper, selezioni Solution➔ Recompute (F5) per aggiornare la parte e il programma in RoboDK.