Impostazioni
Ogni componente di Grasshopper contiene impostazioni specifiche che può personalizzare. Può anche modificare le impostazioni predefinite che si applicano ai comandi di RoboDK (o ai pulsanti della barra degli strumenti) selezionando il pulsante Impostazioni.
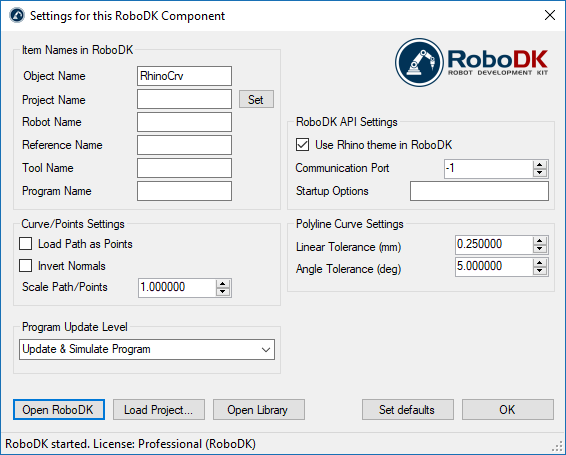
●Nome oggetto - Imposta il nome dell'oggetto curva/punti che sarà caricato in RoboDK. L'oggetto in RoboDK viene sovrascritto ogni volta che il percorso viene ricalcolato. Questo valore viene ignorato se il nome dell'oggetto viene fornito come input del componente (O).
●Nome del progetto - Imposti il nome/percorso del progetto/stazione RoboDK (file .RDK) da utilizzare. Se il file è già caricato, utilizzerà il progetto esistente. Se il progetto aperto in RoboDK non corrisponde al nome del file, aprirà il progetto se viene specificato il percorso completo.
●Nome robot - Imposta il nome dell'oggetto robot che sarà caricato in RoboDK. Il nome del robot deve corrispondere al nome visibile dalla struttura della stazione RoboDK. Lasciare questo valore vuoto (default) per utilizzare il primo robot disponibile.
●Nome riferimento - Imposta il nome del quadro di riferimento per posizionare il percorso rispetto al robot. Il nome deve corrispondere al nome visibile nell'albero delle stazioni di RoboDK.
●Nome utensile - Impostare il nome dell'utensile (TCP) da utilizzare con il robot per seguire il percorso.
Il nome deve corrispondere al nome visibile nell'albero delle stazioni di RoboDK.
●Nome programma - Imposta il nome o il percorso del programma da generare.
●Carica percorso come punti - Selezioni questa opzione per creare l'oggetto come punti e un progetto Point follow in RoboDK. Questo è utile per le operazioni di produzione come la foratura. Deselezionare questa opzione per caricare il percorso come progetto Curve follow.
●Inverti norme - Selezioni questa opzione per invertire le norme della superficie calcolata. Questo capovolgerà l'orientamento dell'utensile del robot.
●Utilizzare il tema Rhino in RoboDK - Avvii RoboDK con un tema Rhino. Questo include la modifica del comportamento del mouse per la navigazione 3D e il colore dello sfondo. Queste impostazioni si applicano solo quando RoboDK viene avviato con Rhino. Queste impostazioni possono essere modificate nel menu Strumenti-Opzioni di RoboDK.
●Porta di comunicazione - Impostare la porta di comunicazione per comunicare con RoboDK. Più istanze di RoboDK possono essere in esecuzione contemporaneamente e utilizzare configurazioni diverse se viene utilizzata una porta diversa. Quando questo valore è impostato su -1 (predefinito), viene utilizzata la porta predefinita (20500).
●Opzioni di avvio - Imposta gli argomenti da passare a RoboDK al primo avvio. Ad esempio, per avviare RoboDK in modo silenzioso, può impostare '/NOSPLASH /NOSHOW /HIDDEN'. I programmi possono essere generati anche se RoboDK non viene visualizzato. Maggiori informazioni nella sezione Riga di comando dell'API RoboDK.
●Tolleranza lineare (mm) - Imposta la precisione lineare per dividere le curve come un insieme di punti.
●Tolleranza angolare (mm) - Imposta la precisione angolare per dividere le curve come un insieme di punti.
Pulsanti:
●Aprire RoboDK - Aprire un progetto in RoboDK... Si aprirà una nuova finestra con ulteriori opzioni.
●Carica progetto ... - Carica il progetto RoboDK (file RDK) con cui desidera utilizzare questo componente");
●Open Library - La biblioteca online di Open RoboDK.
●Imposta predefiniti - Imposta le impostazioni predefinite per il componente.
●OK - Applica queste impostazioni e chiude questa finestra. Se non seleziona OK, le impostazioni modificate non verranno applicate.