Add-in RoboDK per Rhino
Il componente aggiuntivo RoboDK per Rhino le permette di combinare la modellazione parametrica di Rhino con RoboDK per la simulazione di robot e la programmazione offline.
Con il componente aggiuntivo RoboDK per Rhino può caricare facilmente i modelli 3D creati in Rhino in RoboDK. Questo plug-in le permette di programmare più di 500 bracci robotici diversi direttamente da Rhino.
I programmi dei robot possono essere generati direttamente da un gruppo di curve, punti o programmi CAM (come file APT o G-code). I robot possono essere facilmente programmati come macchine a 5 assi per un'ampia gamma di applicazioni di produzione, come la foratura, la saldatura, la rifilatura, la stampa 3D o la fresatura robotizzata. Maggiori informazioni sono disponibili nella sezione fresatura robotizzata.
La sezione post processori robot mostra un elenco delle marche di robot e dei controllori supportati. È anche possibile modificare o creare nuovi post processor per personalizzare la generazione del programma.
Il plug-in RoboDK per Rhino funziona per Rhino 5, Rhino 6 e Rhino 7. Il plug-in RoboDK per Rhino è gratuito, tuttavia alcune opzioni di RoboDK richiedono l'acquisto di una licenza.

Installare
Segua questi passaggi per installare il plug-in RoboDK per Rhino:
Download:
1.Scaricare e installare Rhinoceros.
2.Scarichi e installi RoboDK. I file del programma di installazione di Rhino saranno disponibili in C:/RoboDK/Other/Plugin-Rhino/.
3.Scarichi il plugin RoboDK per Rhino direttamente o da Food4Rhino.
4.Decomprima i file.
Clicchi due volte sul file di installazione RoboDK.RUI e segua le istruzioni per installare il plugin. Se questa procedura non riesce, può installare il plugin manualmente.
Il plug-in RoboDK per Rhino contiene comandi di Rhino (che iniziano con il prefisso RoboDK_...), componenti di Grasshopper e una barra degli strumenti. Ogni pulsante della barra degli strumenti è collegato a un comando RoboDK.
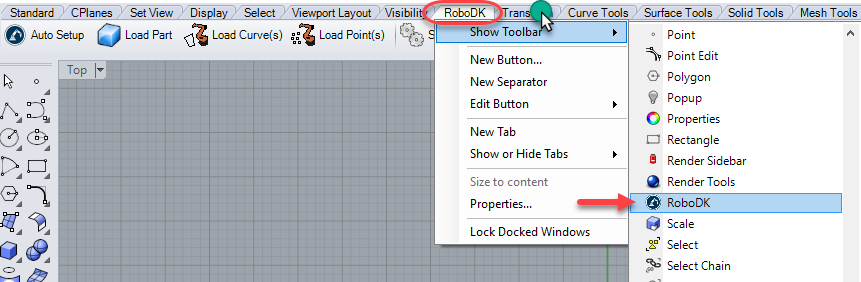
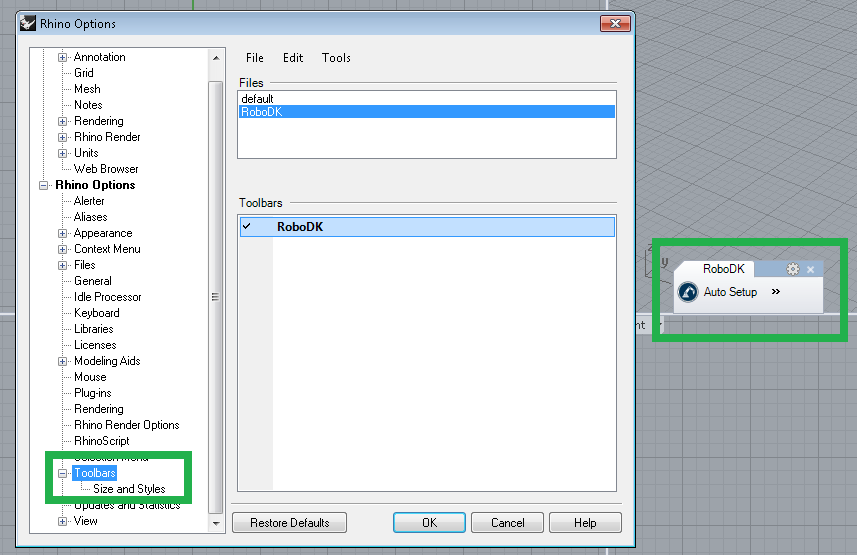
Barra degli strumenti di Rhino
La barra degli strumenti predefinita fornita per Rhino comprende 5 pulsanti:

●
●
●
●
●
La differenza principale tra Auto Setup e Load Curve(s) o Load Point(s) è che Auto Setup carica la parte e crea un nuovo progetto Curve/Punti. L'uso di Load Curve(s) o Load Point(s) è più veloce e si limita ad aggiornare le caratteristiche geometriche esistenti in RoboDK, mantenendo le impostazioni definite in precedenza.
Barra degli strumenti Grasshopper
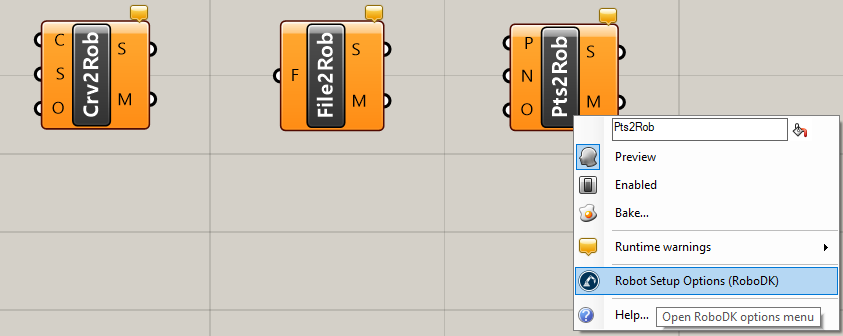
Il plug-in RoboDK per Rhino include 3 componenti Grasshopper:

●
●
●
Tutti i componenti restituiscono uno stato (S) come percentuale (100% significa che il robot può completare il programma con successo). Inoltre, è possibile leggere un messaggio descrittivo (M) da ciascun componente.
Può fare clic con il pulsante destro del mouse su qualsiasi componente e selezionare Opzioni di impostazione del robot (RoboDK) per personalizzare le impostazioni specifiche di un componente.
Impostazioni
Ogni componente di Grasshopper contiene impostazioni specifiche che può personalizzare. Può anche modificare le impostazioni predefinite che si applicano ai comandi di RoboDK (o ai pulsanti della barra degli strumenti) selezionando il pulsante Impostazioni.
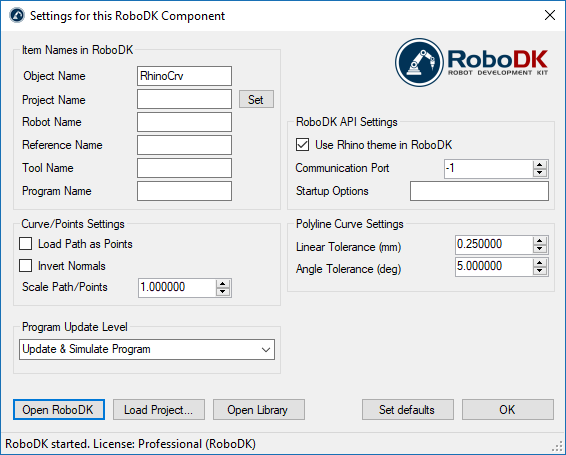
●Nome oggetto - Imposta il nome dell'oggetto curva/punti che sarà caricato in RoboDK. L'oggetto in RoboDK viene sovrascritto ogni volta che il percorso viene ricalcolato. Questo valore viene ignorato se il nome dell'oggetto viene fornito come input del componente (O).
●Nome del progetto - Imposti il nome/percorso del progetto/stazione RoboDK (file .RDK) da utilizzare. Se il file è già caricato, utilizzerà il progetto esistente. Se il progetto aperto in RoboDK non corrisponde al nome del file, aprirà il progetto se viene specificato il percorso completo.
●Nome robot - Imposta il nome dell'oggetto robot che sarà caricato in RoboDK. Il nome del robot deve corrispondere al nome visibile dalla struttura della stazione RoboDK. Lasciare questo valore vuoto (default) per utilizzare il primo robot disponibile.
●Nome riferimento - Imposta il nome del quadro di riferimento per posizionare il percorso rispetto al robot. Il nome deve corrispondere al nome visibile nell'albero delle stazioni di RoboDK.
●Nome utensile - Impostare il nome dell'utensile (TCP) da utilizzare con il robot per seguire il percorso.
Il nome deve corrispondere al nome visibile nell'albero delle stazioni di RoboDK.
●Nome programma - Imposta il nome o il percorso del programma da generare.
●Carica percorso come punti - Selezioni questa opzione per creare l'oggetto come punti e un progetto Point follow in RoboDK. Questo è utile per le operazioni di produzione come la foratura. Deselezionare questa opzione per caricare il percorso come progetto Curve follow.
●Inverti norme - Selezioni questa opzione per invertire le norme della superficie calcolata. Questo capovolgerà l'orientamento dell'utensile del robot.
●Utilizzare il tema Rhino in RoboDK - Avvii RoboDK con un tema Rhino. Questo include la modifica del comportamento del mouse per la navigazione 3D e il colore dello sfondo. Queste impostazioni si applicano solo quando RoboDK viene avviato con Rhino. Queste impostazioni possono essere modificate nel menu Strumenti-Opzioni di RoboDK.
●Porta di comunicazione - Impostare la porta di comunicazione per comunicare con RoboDK. Più istanze di RoboDK possono essere in esecuzione contemporaneamente e utilizzare configurazioni diverse se viene utilizzata una porta diversa. Quando questo valore è impostato su -1 (predefinito), viene utilizzata la porta predefinita (20500).
●Opzioni di avvio - Imposta gli argomenti da passare a RoboDK al primo avvio. Ad esempio, per avviare RoboDK in modo silenzioso, può impostare '/NOSPLASH /NOSHOW /HIDDEN'. I programmi possono essere generati anche se RoboDK non viene visualizzato. Maggiori informazioni nella sezione Riga di comando dell'API RoboDK.
●Tolleranza lineare (mm) - Imposta la precisione lineare per dividere le curve come un insieme di punti.
●Tolleranza angolare (mm) - Imposta la precisione angolare per dividere le curve come un insieme di punti.
Pulsanti:
●Aprire RoboDK - Aprire un progetto in RoboDK... Si aprirà una nuova finestra con ulteriori opzioni.
●Carica progetto ... - Carica il progetto RoboDK (file RDK) con cui desidera utilizzare questo componente");
●Open Library - La biblioteca online di Open RoboDK.
●Imposta predefiniti - Imposta le impostazioni predefinite per il componente.
●OK - Applica queste impostazioni e chiude questa finestra. Se non seleziona OK, le impostazioni modificate non verranno applicate.
Esempi
Questa sezione mostra esempi di base per caricare un progetto Rhino in RoboDK per la simulazione del robot e la programmazione offline.
Incisione di una cupola
Strisce a cupola
Questo esempio mostra come caricare una stazione RoboDK campione (configurazione predefinita) e seguire una serie di curve definite in Rhino con il robot.
1.Carichi l'esempio della Cupola in Rhino.
2.Selezioni la scheda RoboDK e selezioni
3.Selezionare Carica progetto...
4.Selezioni l'Impostazione predefinita. RoboDK avvierà e caricherà un progetto campione con un robot KUKA, un utensile (un mandrino come Utensile 1) e un piano di riferimento (Riferimento 1).
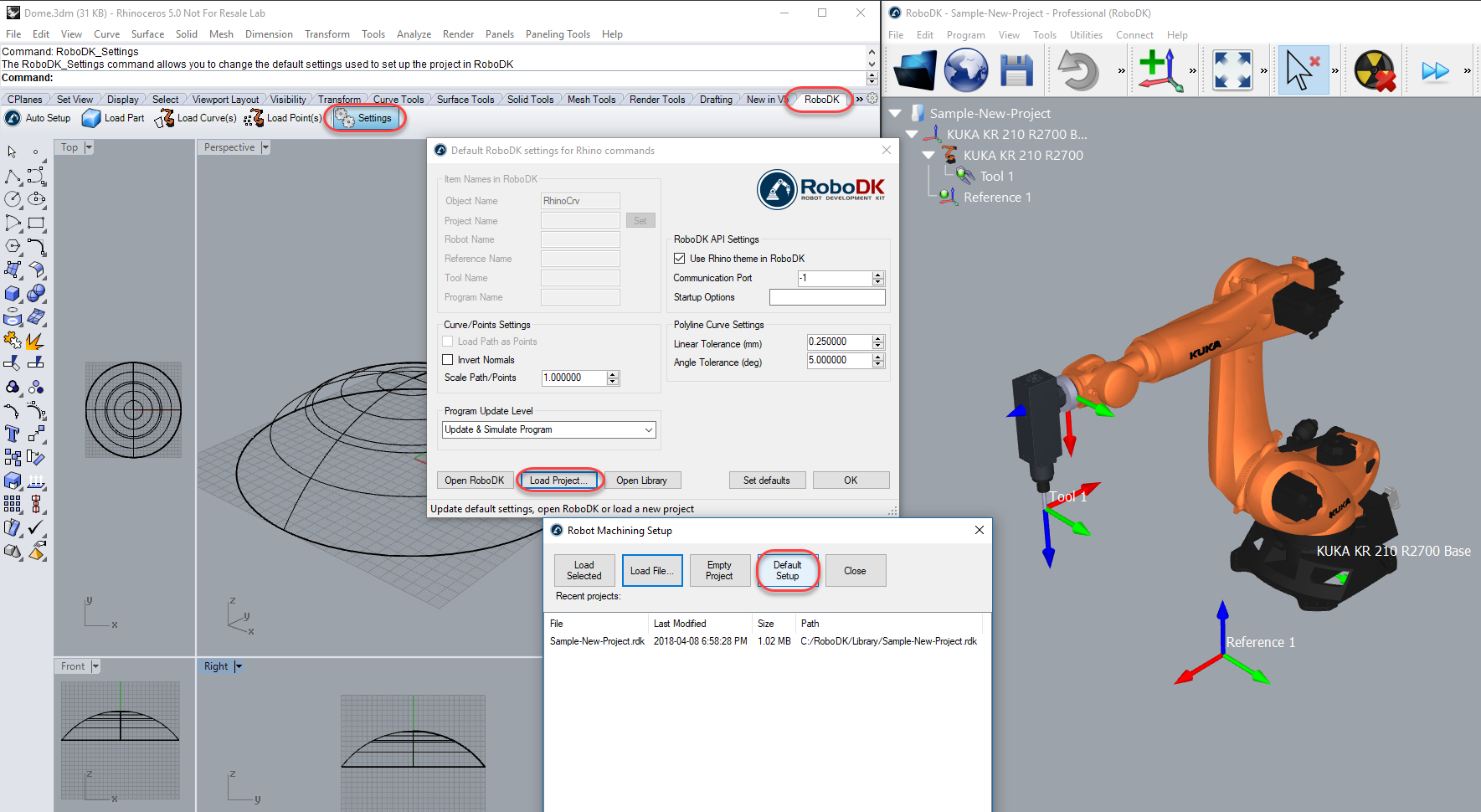
5.Chiudere la finestra Impostazioni o selezionare OK.
6.Selezioni il pulsante
7.Selezioni tutte le curve e le superfici e prema Invio (o clicchi con il tasto destro del mouse). Il progetto verrà caricato in RoboDK come mostrato nell'immagine seguente.
Dovrebbe vedere la parte caricata sul piano di riferimento attivo (Riferimento 1) e un nuovo progetto Curve follow in RoboDK che segue le curve con l'utensile attivo del robot (Utensile 1).
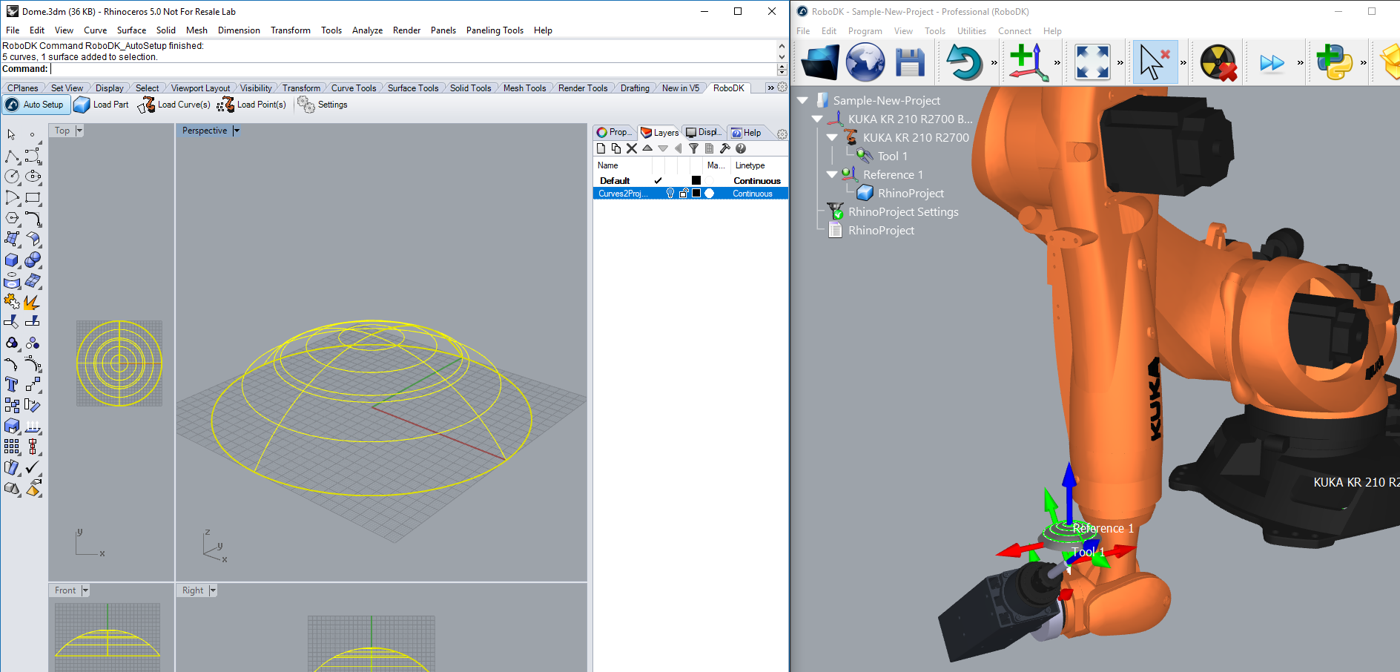
Si può anche vedere che le normali della superficie sono state estratte nella direzione opposta. Segua questi passaggi per risolvere questo problema:
8.Selezioni
9.Selezioni l'opzione Invertire le norme.
10.Selezioni OK.
11.Ripeta i passaggi 6 e 7.
Ora dovrebbe vedere le norme della superficie capovolte e il movimento di avvicinamento proviene dalla parte superiore della parte. Il robot dovrebbe essere in grado di muoversi lungo il percorso utensile senza problemi.
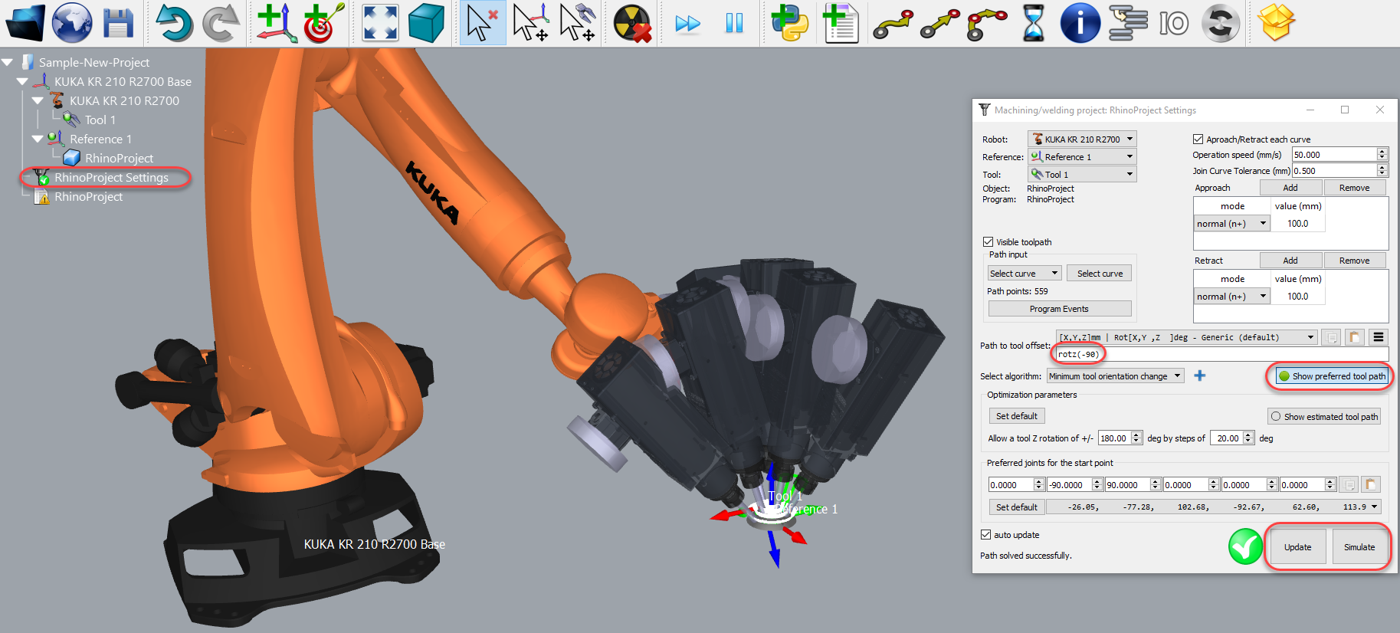
Clicchi due volte su
Ad esempio, può selezionare Mostra percorso utensile preferito per vedere e modificare l'orientamento predefinito dell'utensile rispetto alla parte. Modifichi il valore di offset Percorso utensile per definire una rotazione aggiuntiva. Per farlo, può inserire un nuovo valore o semplicemente usare la rotella del mouse per vedere una rapida anteprima del risultato.
Maggiori informazioni per modificare queste impostazioni sono disponibili nella sezione Lavorazione robot.
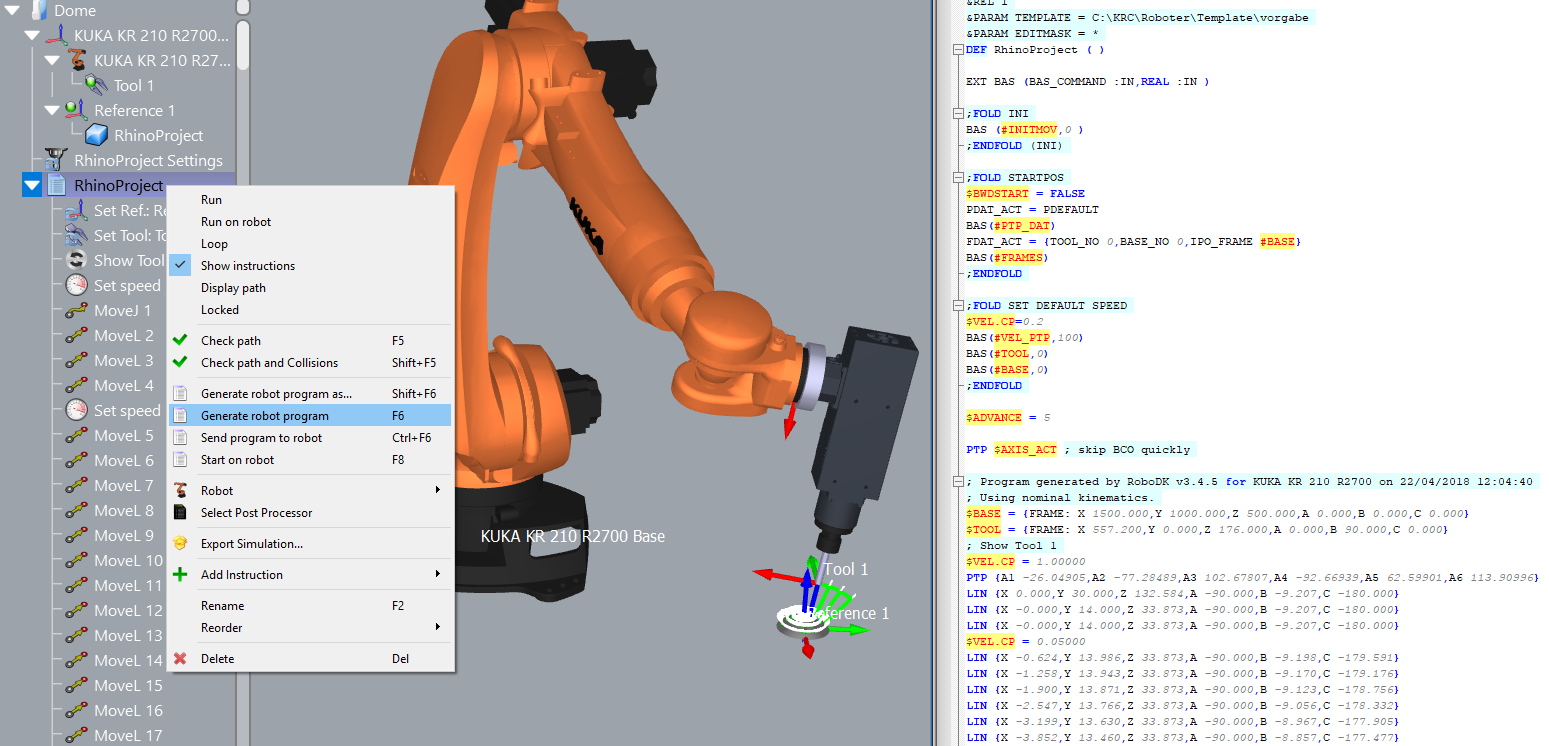
Infine, quando la simulazione produce il risultato desiderato, può generare il programma o esportare la simulazione:
12.Clicchi con il tasto destro del mouse sul programma RhinoProject
13.Selezionare Genera programma robot (F6). Il programma del robot verrà generato e visualizzato.
Esempio di Grasshopper
Questo esempio mostra come utilizzare il plug-in RoboDK per Grasshopper, dividendo una superficie come una griglia di punti e seguendoli con un robot per un'operazione di perforazione in RoboDK:
1.Carichi l'esempio di Grasshopper fornito con il plug-in RoboDK (file 3dm e file gh).
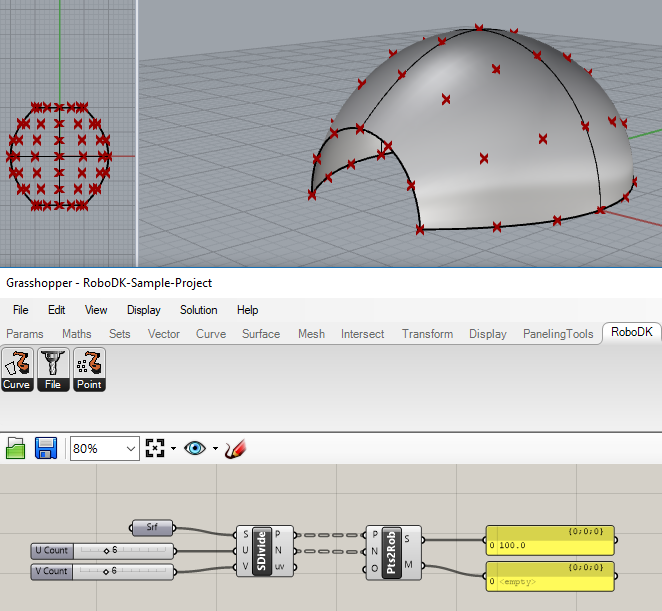
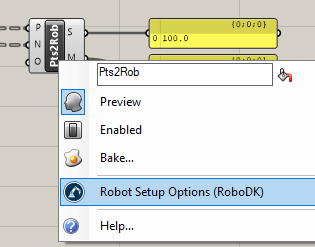
2.Clicchi con il tasto destro del mouse sul componente Pts2Rob e selezioni Opzioni di impostazione robot (RoboDK). Selezioni Carica progetto... e selezioni Impostazione predefinita per caricare una stazione RoboDK campione (lo stesso progetto campione mostrato nella sezione precedente).
Può facoltativamente fornire il nome dell'oggetto come input del componente (O). Può anche specificare un progetto nelle opzioni del componente, in modo che il progetto RoboDK desiderato venga utilizzato con ogni componente.
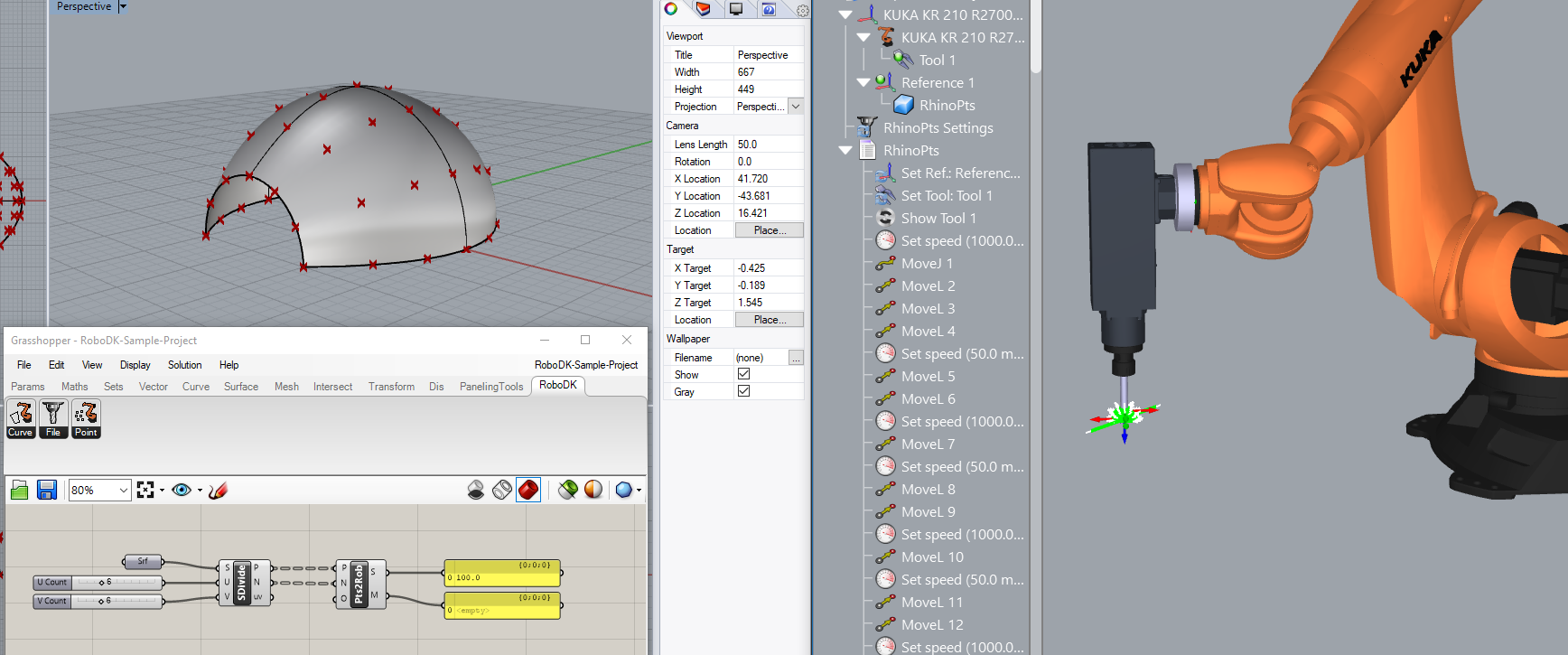
3.In Grasshopper, selezioni Solution➔ Recompute (F5) per aggiornare la parte e il programma in RoboDK.
Installazione manuale
Si consiglia di provare il programma di installazione automatica RUI. Se questo programma di installazione non funziona, può installare manualmente il plug-in RoboDK per Rhino seguendo questi passaggi:
Download:
1.Scaricare e installare Rhinoceros.
2.Scarichi e installi RoboDK.
3.Scarichi il plugin RoboDK per Rhino direttamente o da Food4Rhino.
4.Decomprimere i file.
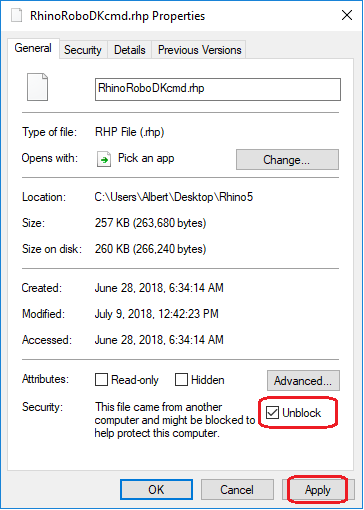
Sblocca le proprietà:
5.Clicchi con il tasto destro del mouse sul file RhinoRoboDKcmd.rhp e selezioni Proprietà.
6.Selezioni Sblocca e Applica.
7.Ripeta i passaggi 5 e 6 per RhinoRoboDKgh.gha.
Carichi il plug-in RoboDK in Rhino:
8.Carichi il plug-in RoboDK per Rhino: Apra il file RhinoRoboDKcmd.rhp con Rhino.
9.Carichi la barra degli strumenti predefinita di RoboDK per Rhino: Apra il file RhinoToolbar-Add-RoboDK.rui con Rhino.
10.Caricare i componenti di RoboDK Grasshopper: Apra il file RhinoRoboDKgh.gha con Grasshopper (apra Grasshopper digitando il comando grasshopper).
Riavvii Rhino:
11.Chiuda Rhino e lo riapra per vedere il plug-in Grasshopper.