Esempio di elica
Questo esempio mostra come caricare una stazione RoboDK campione (configurazione predefinita) e seguire una serie di curve definite in SolidWorks con il robot.
1.Carichi l'esempio di Eliche a 3 pale in SolidWorks.
2.Selezioni la scheda RoboDK e selezioni
3.Selezionare Carica progetto...
4.Selezioni l'Impostazione predefinita. RoboDK avvierà e caricherà un progetto campione con un robot KUKA, un utensile (un mandrino come Utensile 1) e un piano di riferimento (Riferimento 1).
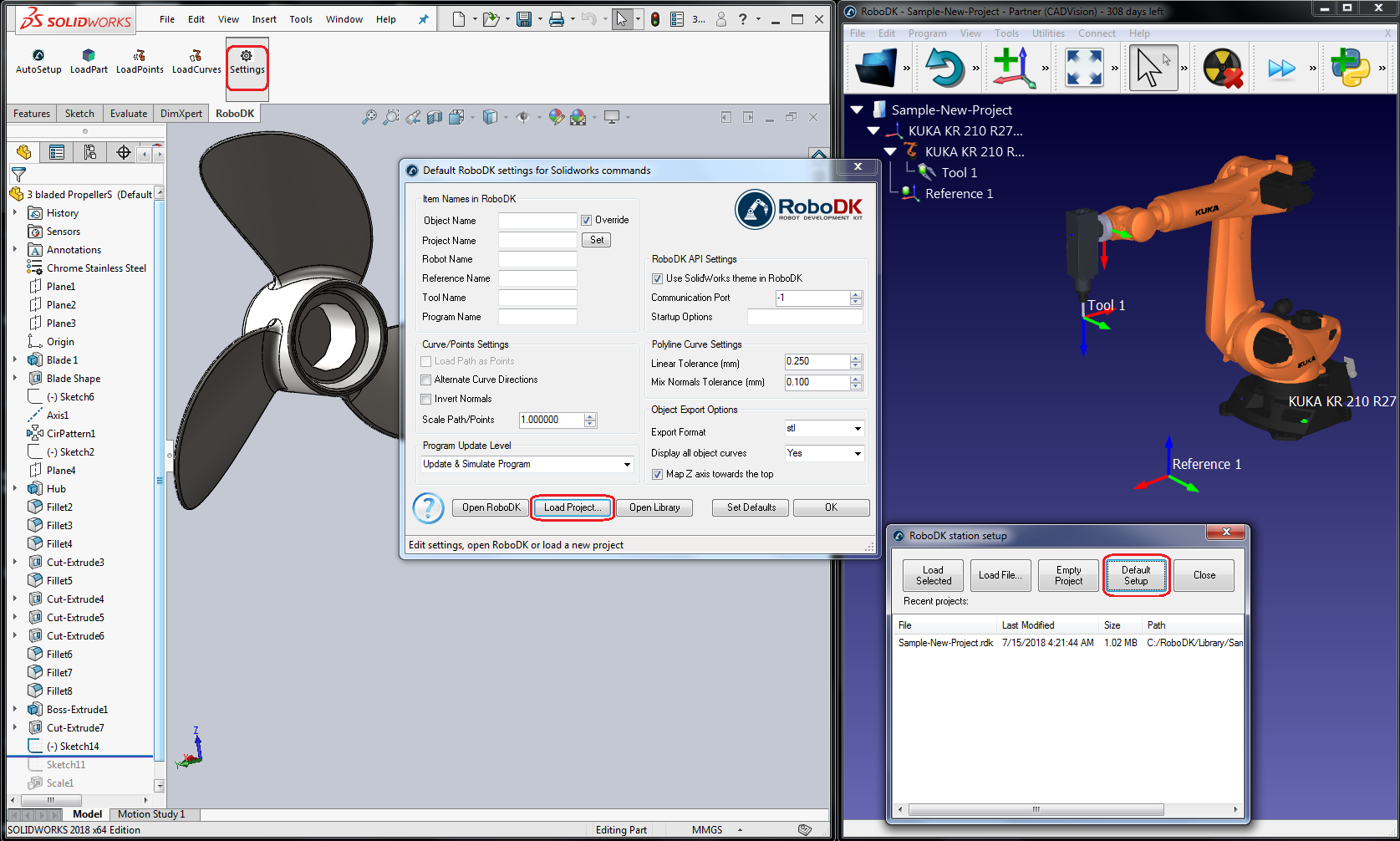
5.Chiudere la finestra Impostazioni o selezionare OK.
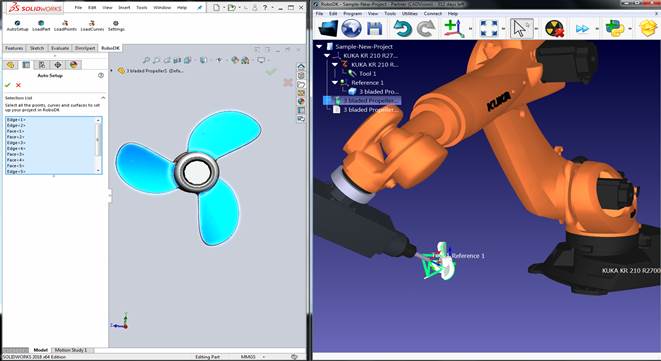
6.Selezionare il pulsante
7.Selezionare tutte le curve e le superfici e premere OK nella pagina Property Manager. Il progetto verrà caricato in RoboDK come mostrato nell'immagine seguente.
Dovrebbe vedere la parte caricata sul piano di riferimento attivo (riferimento 1) e un nuovo progetto Curve follow in RoboDK che segue il percorso utensile.
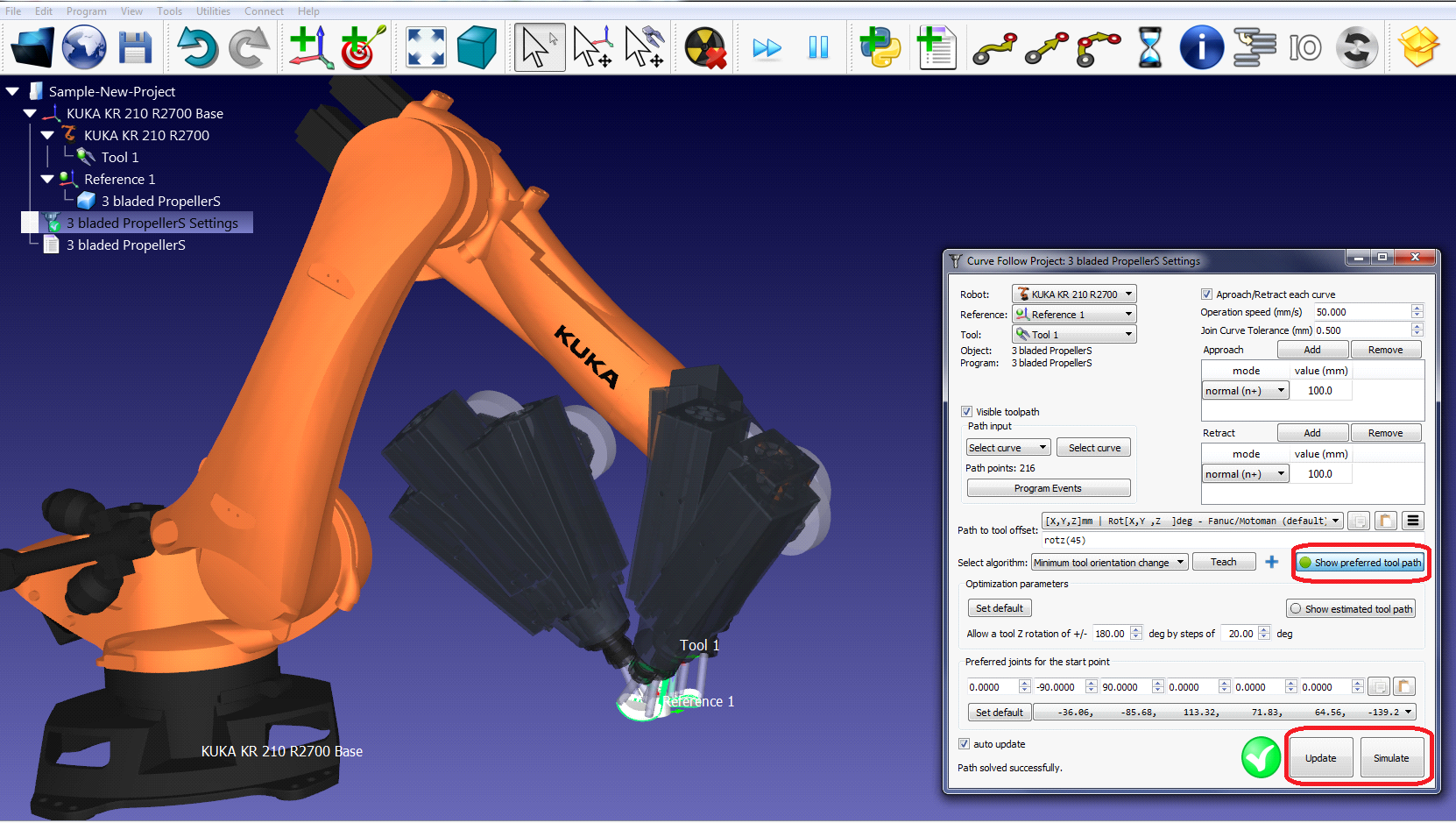
Si può vedere che il movimento di avvicinamento è normale rispetto al percorso utensile. Il robot dovrebbe essere in grado di muoversi lungo il percorso utensile senza problemi.
Faccia doppio clic su Impostazioni elica a 3 pale
Ad esempio, può selezionare Mostra percorso utensile preferito per vedere e modificare l'orientamento predefinito dell'utensile rispetto alla parte. Modifichi il valore di offset Percorso utensile per definire una rotazione aggiuntiva. Per farlo, può inserire un nuovo valore o semplicemente usare la rotella del mouse per vedere una rapida anteprima del risultato.
Maggiori informazioni per modificare queste impostazioni sono disponibili nella sezione Lavorazione robot.
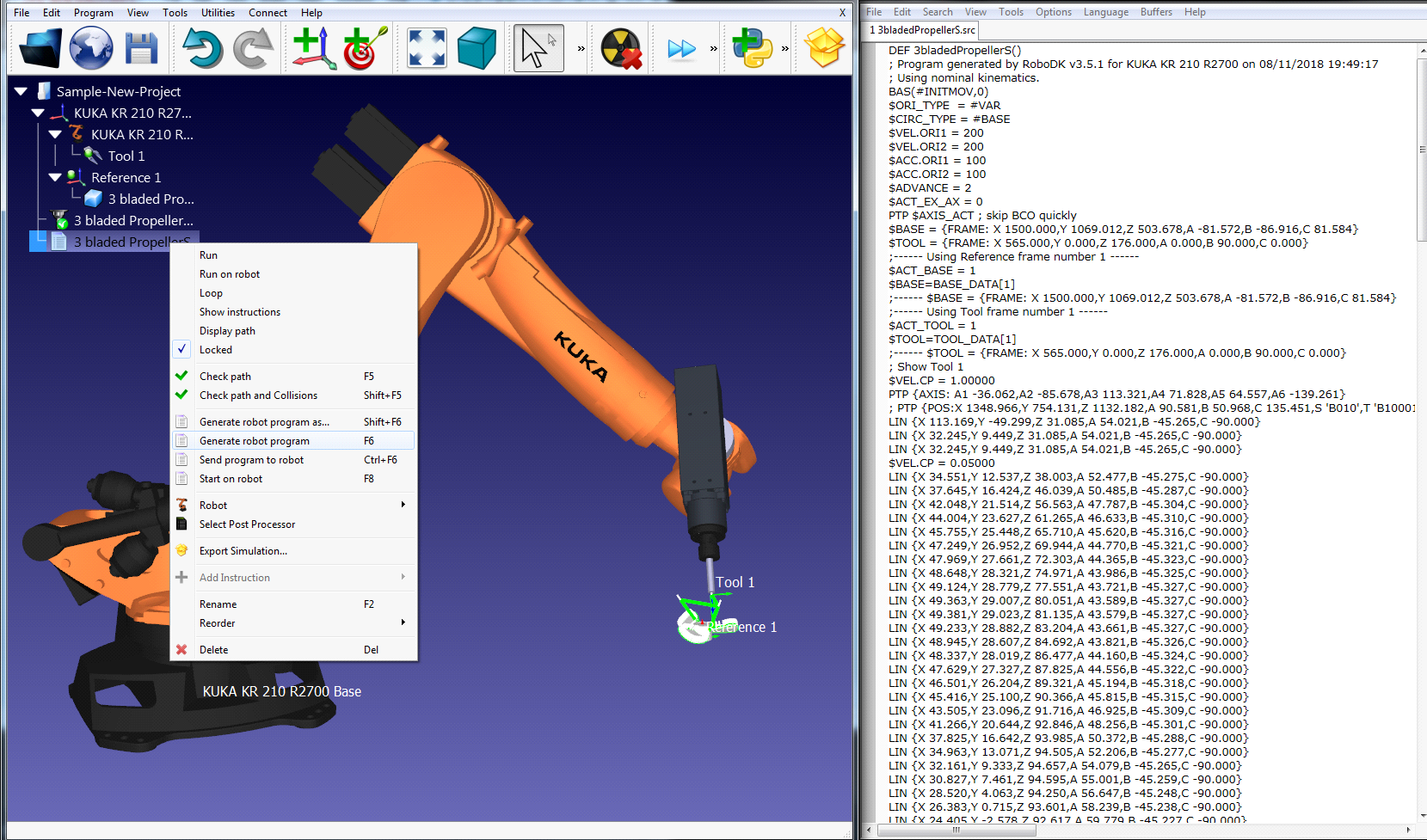
Infine, quando la simulazione produce il risultato desiderato, può generare il programma o esportare la simulazione:
8.Clicchi con il tasto destro del mouse sul programma
9.Selezionare Genera programma robot (F6). Il programma del robot verrà generato e visualizzato.