flusso di lavoro hyperMILL
In hyperMILL/hyperCAD-S può utilizzare il plugin RoboDK per facilitare l'invio di lavori di lavorazione a RoboDK. Ciò consente di simulare e programmare i robot per la lavorazione robotizzata.
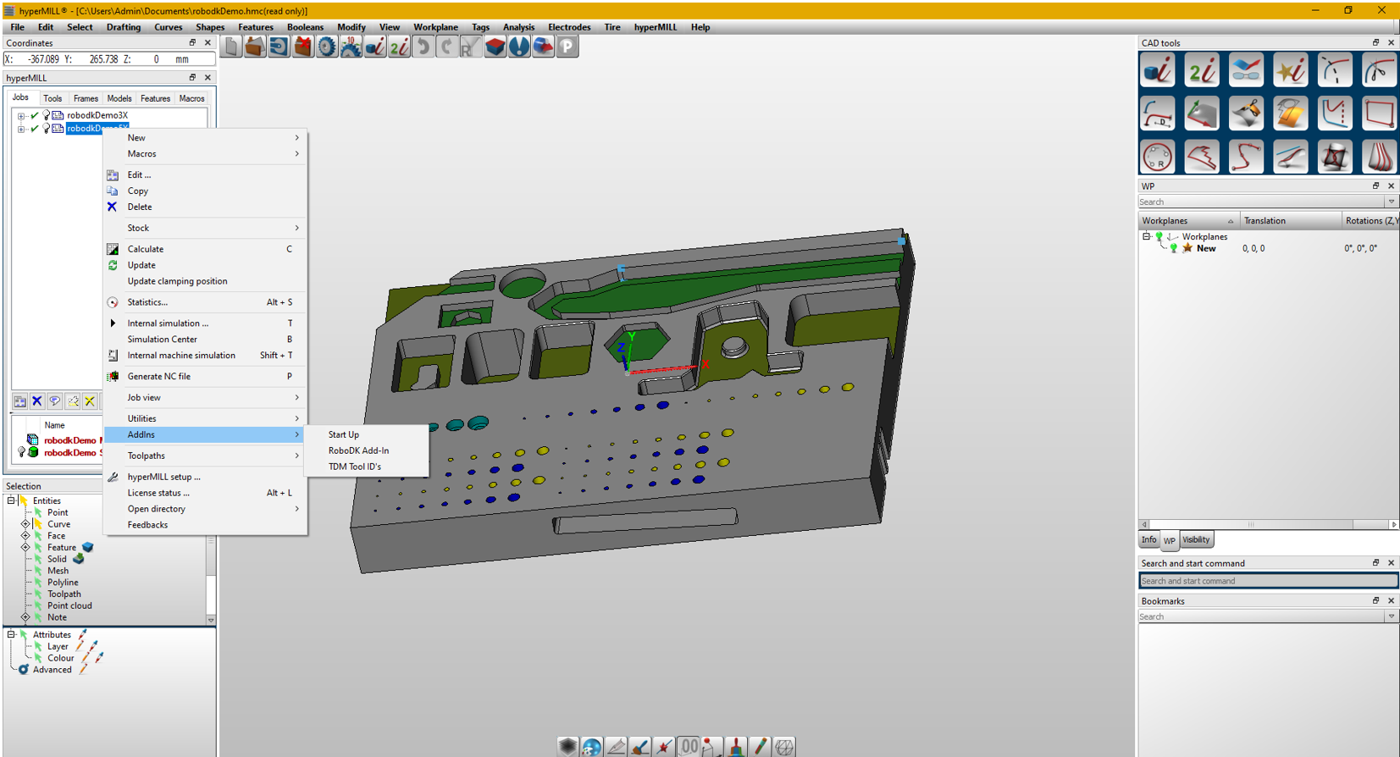
Segua questi passaggi per impostare automaticamente il suo progetto di fresatura robotizzata da hyperMILL/hyperCAD-S:
1.Clicchi con il tasto destro del mouse sul suo Lavoro.
2.Selezioni Add-in.
3.Selezioni RoboDK Add-in.
Verrà visualizzato un segno di spunta verde se il programma è fattibile con il robot selezionato. Se ci sono problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso con un messaggio del problema.
Clicchi due volte sul progetto di lavorazione robot
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per ottenere il programma robot che deve essere caricato sul controller robot. Maggiori informazioni su come generare i programmi del robot sono disponibili nella sezione Programmazione offline.
Se necessario, faccia clic con il pulsante destro del mouse su un programma e selezioni Post Processor per cambiare il Post Processor. Questo passaggio può aiutarla a personalizzare l'aspetto del codice generato. Maggiori informazioni sulla selezione e la personalizzazione dei post processor sono disponibili nella sezione Post processor.