RoboDK Plugin for hyperMILL
Introduzione a hyperMILL
L'add-in RoboDK per OpenMind hyperMILL le permette di impostare rapidamente progetti di fresatura robotizzata direttamente da hyperMILL. Con l'integrazione RoboDK per il software OpenMind può facilmente combinare il software di lavorazione CAD/CAM hyperMILL con RoboDK per simulare e programmare bracci robotici industriali per la fresatura robotizzata.
Con questo add-in hyperMILL può generare facilmente programmi privi di errori per la fresatura robotizzata direttamente da hyperMILL. In alternativa, RoboDK supporta anche i file di lavorazione APT CLS e G-code standard.
Maggiori informazioni su RoboDK per la fresatura robotizzata sono disponibili nella sezione Lavorazione robot. Per saperne di più su hyperMILL e hyperCAD-s, visiti https:/www.openmind-tech.com/en.html.
Questo documento descrive come impostare il plugin RoboDK per il software hyperMILL e come utilizzare hyperMILL per impostare progetti di fresatura robotizzata in RoboDK.
Impostazione hyperMILL
Segua questi passaggi per installare l'Add-in RoboDK per hyperMILL.
1.Scarichi il plugin
https://robodk.com/files/upload/hyperMILL_AddIn_RoboDK.zip
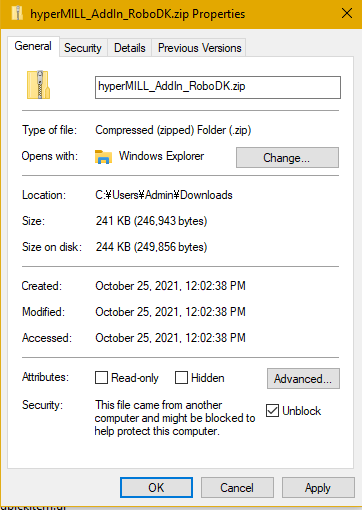
2.Contrassegnare il plugin come sicuro: fare clic con il pulsante destro del mouse sulla cartella ZIP, selezionare Proprietà e selezionare l'opzione Sblocca.
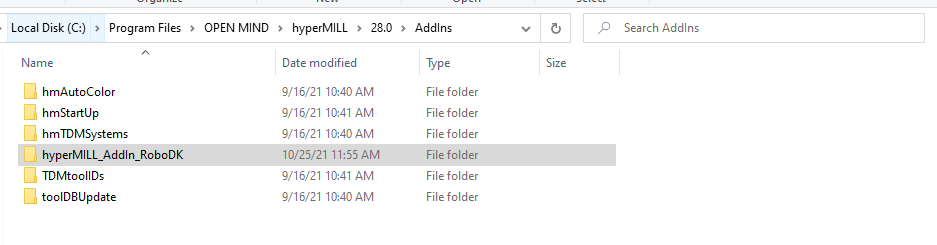
3.Estragga il contenuto della cartella ZIP in "C:\File di programma\OPEN MIND\hyperMILL\28.0\AddIns", o nella sua directory di installazione equivalente.
La cartella del plugin dovrebbe apparire come mostrato nella seguente immagine.
flusso di lavoro hyperMILL
In hyperMILL/hyperCAD-S può utilizzare il plugin RoboDK per facilitare l'invio di lavori di lavorazione a RoboDK. Ciò consente di simulare e programmare i robot per la lavorazione robotizzata.
Segua questi passaggi per impostare automaticamente il suo progetto di fresatura robotizzata da hyperMILL/hyperCAD-S:
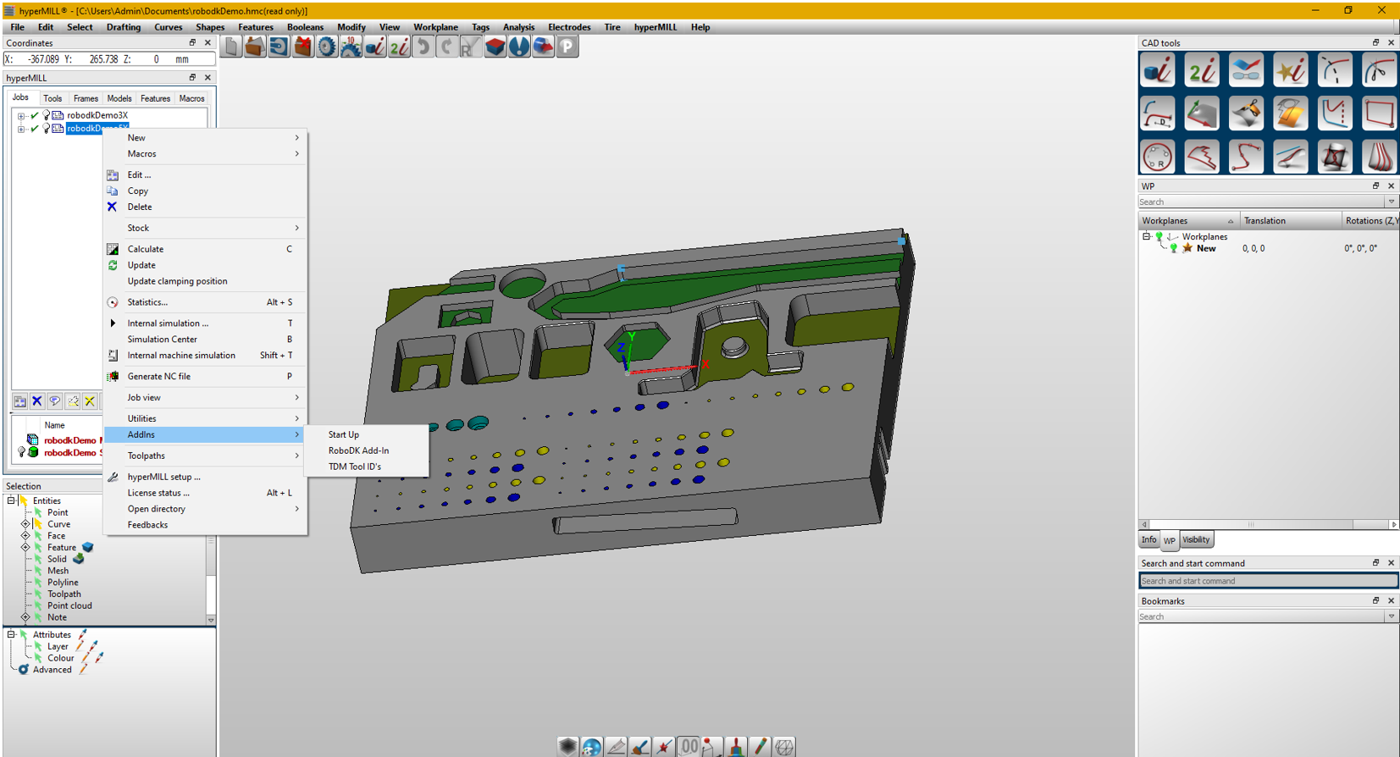
1.Clicchi con il tasto destro del mouse sul suo Lavoro.
2.Selezioni Add-in.
3.Selezioni RoboDK Add-in.
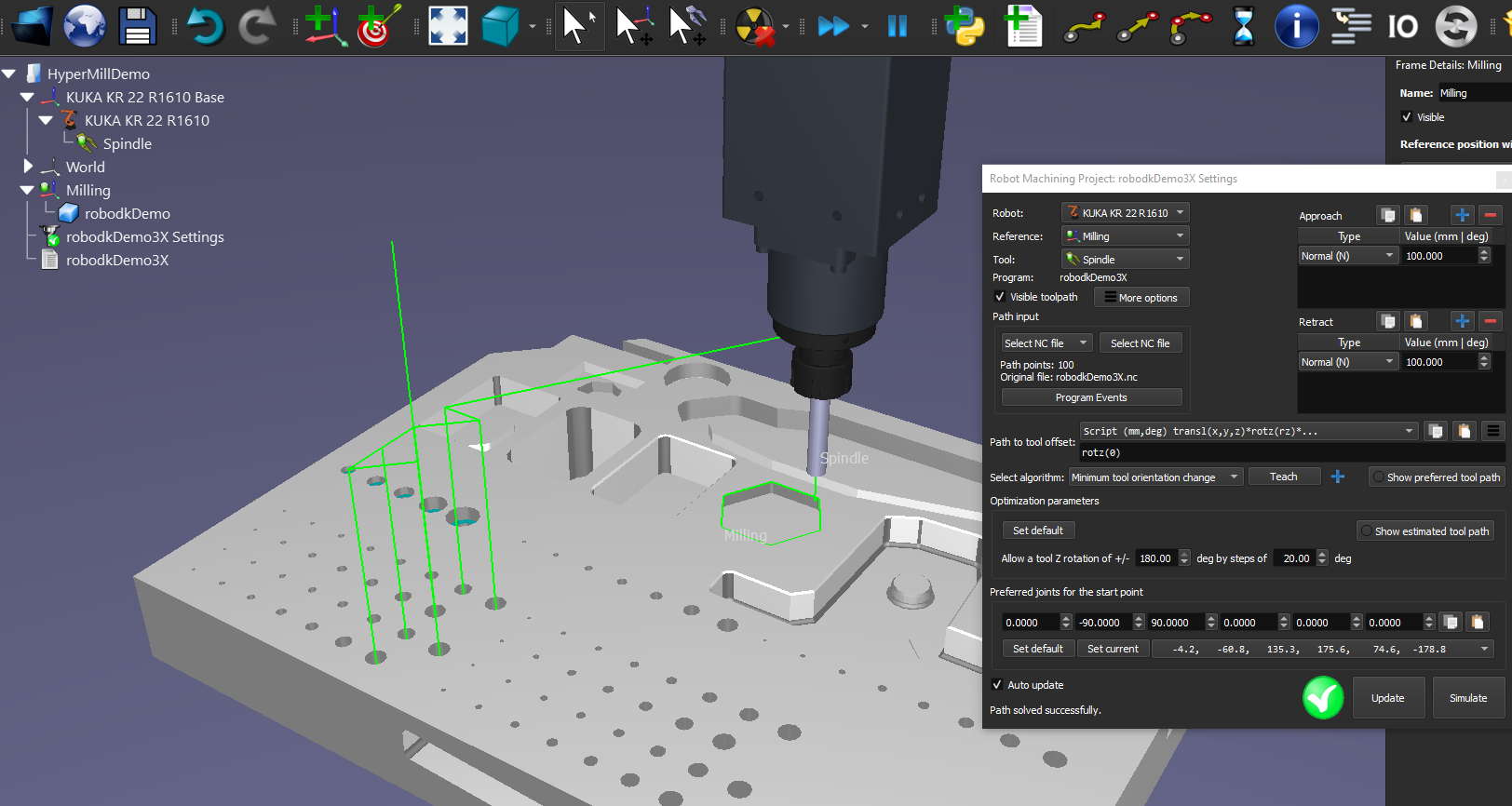
Verrà visualizzato un segno di spunta verde se il programma è fattibile con il robot selezionato. Se ci sono problemi (come singolarità, limiti degli assi o problemi di portata), verrà visualizzato un segno rosso con un messaggio del problema.
Clicchi due volte sul progetto di lavorazione robot
Clicchi con il tasto destro del mouse su un programma e selezioni Esegui per simularlo (oppure faccia doppio clic sul programma). Può anche selezionare Genera programma robot (F6) per ottenere il programma robot che deve essere caricato sul controller robot. Maggiori informazioni su come generare i programmi del robot sono disponibili nella sezione Programmazione offline.
Se necessario, faccia clic con il pulsante destro del mouse su un programma e selezioni Post Processor per cambiare il Post Processor. Questo passaggio può aiutarla a personalizzare l'aspetto del codice generato. Maggiori informazioni sulla selezione e la personalizzazione dei post processor sono disponibili nella sezione Post processor.