Esempio Modifiche
Questa sezione mostra come fare piccole modifiche ad un post processore esistente.
Ad esempio, le prossime 3 modifiche saranno fatte ad un post processor esistente KUKA KRC4:
●Sovrascrivere la massima velocità a 500 mm/s. Anche se il robot è programmato per muoversi più velocemente la velocità sarà limitata a 500 mm/s nel post processore.
●Genera ogni programma come un file separato e forzare i programmi ad avere al massimo 3000 linee di codice per programma. Programmi grandi saranno divisi in programmi più piccoli e chiamati in sequenza.
La sezione precedente mostra come aprire post processori esistenti:
1.Seleziona Programma➔Aggiungi/Modifica Post Processore
2.Seleziona KUKA_KRC4
3.Seleziona OK. Il post processore sarà mostrato nell'editor IDLE Python.
Le prossime sezioni mostrano come fare modifiche nell'editor testo.
Forzare limite velocità
Segui questi passaggi per impostare un limite velocità a 500 mm/s ed evitare di impostare velocità maggiori usando RoboDK:
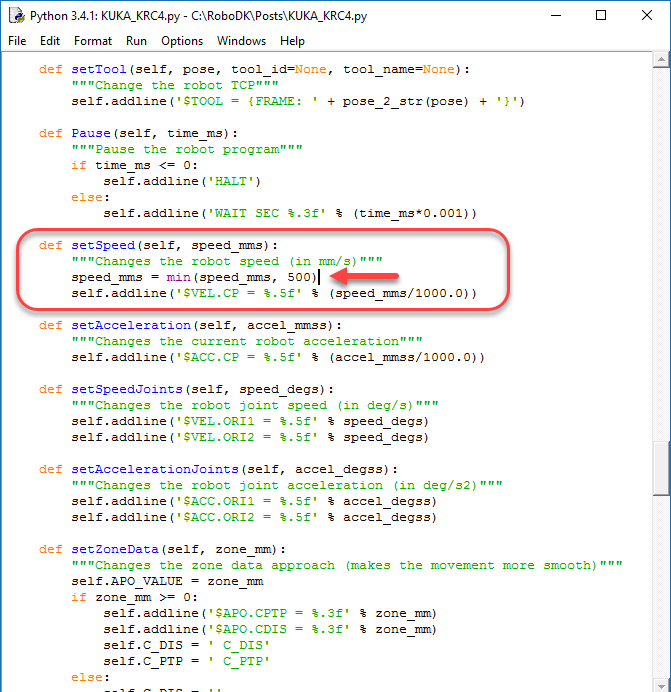
1.Localizzare la funzione setSpeed (def setSpeed)
2.Aggiungi la seguente linea prima di generare l'output $VEL.CP che modifica la velocità in m/s:
speed_mms = min(speed_mms, 500)
Generare un programma per file
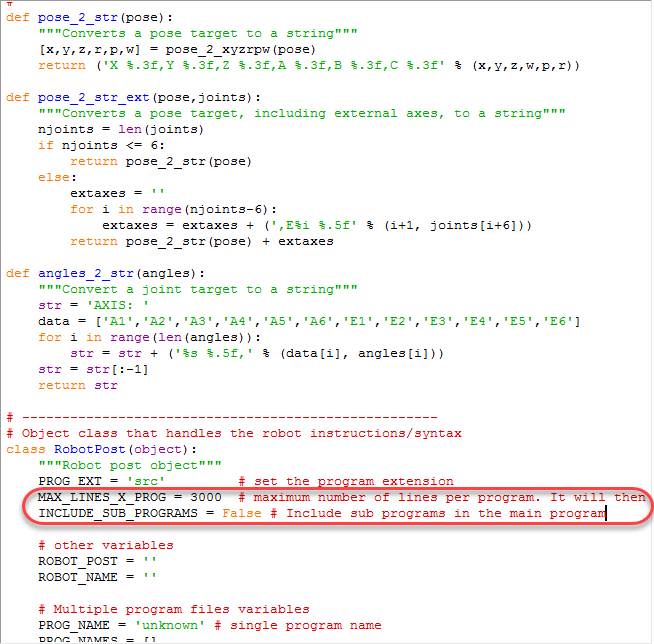
Fai le seguenti modifiche per evitare di aggiungere più di un programma per file e generare programmi con più di 3000 linee di codice:
1.Imposta la variabile MAX_LINES_X_PROG a 3000
2.Imposta la variabile INCLUDE_SUB_PROGRAMS in False