Forzare limite velocità
Segui questi passaggi per impostare un limite velocità a 500 mm/s ed evitare di impostare velocità maggiori usando RoboDK:
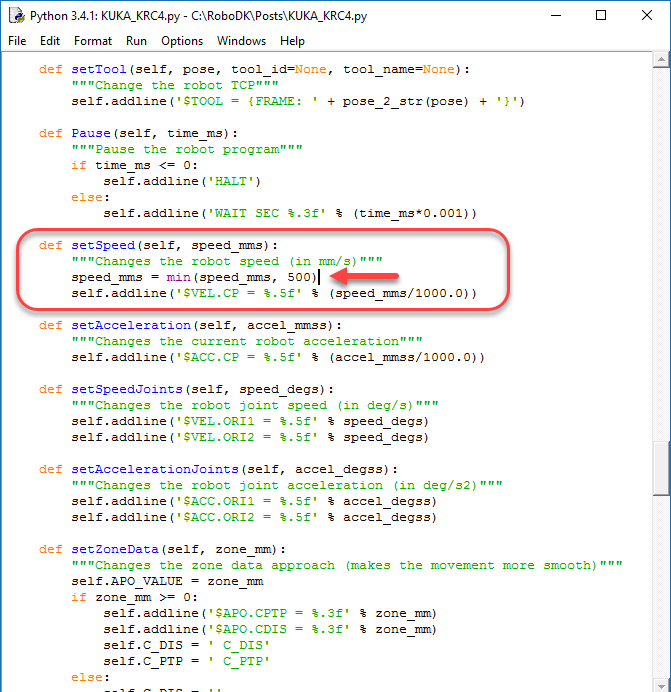
1.Localizzare la funzione setSpeed (def setSpeed)
2.Aggiungi la seguente linea prima di generare l'output $VEL.CP che modifica la velocità in m/s:
speed_mms = min(speed_mms, 500)
Nota: Una velocità di default di 200 mm/s è definita nella variabile nell'HEADER, in cima al post processore ($VEL.CP=0.2). Questa velocità di default può anche essere modificata se la velocità non è modificata in RoboDK.