Interfaccia RRS di RoboDK
RoboDK fornisce un'interfaccia Python configurabile all'implementazione RRS-1 di qualsiasi produttore di robot RCS. Inoltre, fornisce le utilità e le linee di base necessarie per interagire tra RoboDK e l'interfaccia RRS.
Sebbene l'implementazione dell'RRS tra i diversi produttori di robot dovrebbe essere coerente, la linea di base fornita dall'interfaccia potrebbe richiedere alcune modifiche per un marchio specifico. RoboDK fornisce un'implementazione dell'interfaccia RRS specifica per il fornitore.
RoboDK RRS per Comau (Add-in)
RoboDK RRS per Comau è un Add-in RoboDK specifico per i robot Comau. Per installare un Add-in RoboDK, faccia riferimento alla sezione Add-in della documentazione.
Una volta acquisiti e attivati i moduli RCS richiesti da Comau, può iniziare ad utilizzare l'Add-in RoboDK RRS per Comau.
Per creare un programma RSS, segua la seguente procedura:
1.Apra le impostazioni con il programma➔ RRS per Comau➔ Impostazioni
a.Imposta l'ID del robot. Normalmente è 0.
b.Imposta il percorso della cartella del robot. Di solito si tratta della cartella principale che contiene i file .c5g, .CIO e .xml.
c.Imposta il percorso del file del robot. Si tratta del file .c5g contenuto nella cartella del robot.
d.Imposta il percorso del file DLL RRS, di solito rcscomau.dll.
2.Genera il programma RRS facendo clic con il pulsante destro del mouse sul suo programma➔ Genera programma RRS (Comau)
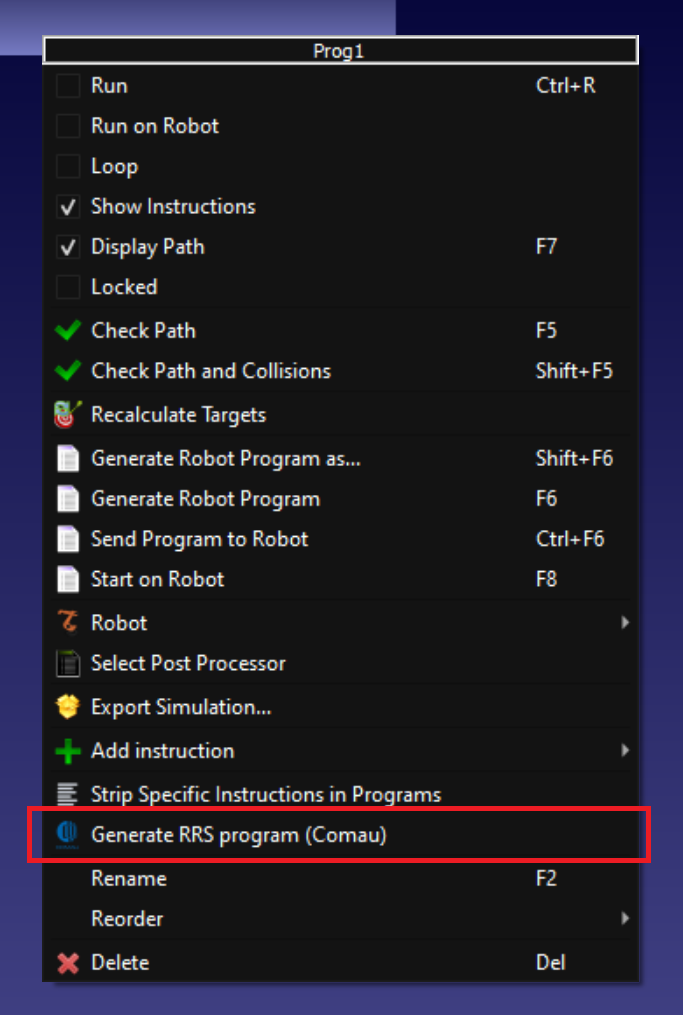
Verrà creato un nuovo programma con giunti accurati e la stima del tempo di ciclo verrà fornita nel nome del programma.