Simulazione realistica di robot (RRS)
Realistic Robot Simulation (RRS) è uno standard che consente di fornire simulazioni accurate di robot e stime del tempo di ciclo. Questo standard RRS consente di integrare il software di controllo originale nelle simulazioni e nel software di programmazione offline.
Gli add-in RRS per RoboDK aggiungono percorsi robotici e tempi di ciclo accurati alle simulazioni e ai programmi RoboDK esistenti. Questo add-in RRS consente di interfacciarsi direttamente con il modulo Robot Controller Software (RCS) di un produttore di robot. L'RCS è essenzialmente il software di pianificazione del movimento proprietario del produttore del robot.
Con il componente aggiuntivo RoboDK RRS, gli utenti possono ottenere simulazioni altamente accurate del comportamento dei robot, generando percorsi utensile e tempi di ciclo precisi all'interno di RoboDK.
Requisiti
Per abilitare il supporto RRS per RoboDK, deve prima acquisire il modulo RCS dal produttore del robot. Di solito si tratta di una libreria (come un file dll su Windows) che viene venduta e attivata separatamente.
Suggeriamo di collocare il modulo RCS del produttore del robot in C:\RoboDK\api\RRS\%BRAND%\. Tuttavia, il percorso di origine può essere specificato attraverso l'Add-in.
Interfaccia RRS di RoboDK
RoboDK fornisce un'interfaccia Python configurabile all'implementazione RRS-1 di qualsiasi produttore di robot RCS. Inoltre, fornisce le utilità e le linee di base necessarie per interagire tra RoboDK e l'interfaccia RRS.
Sebbene l'implementazione dell'RRS tra i diversi produttori di robot dovrebbe essere coerente, la linea di base fornita dall'interfaccia potrebbe richiedere alcune modifiche per un marchio specifico. RoboDK fornisce un'implementazione dell'interfaccia RRS specifica per il fornitore.
RoboDK RRS per Comau (Add-in)
RoboDK RRS per Comau è un Add-in RoboDK specifico per i robot Comau. Per installare un Add-in RoboDK, faccia riferimento alla sezione Add-in della documentazione.
Una volta acquisiti e attivati i moduli RCS richiesti da Comau, può iniziare ad utilizzare l'Add-in RoboDK RRS per Comau.
Per creare un programma RSS, segua la seguente procedura:
1.Apra le impostazioni con il programma➔ RRS per Comau➔ Impostazioni
a.Imposta l'ID del robot. Normalmente è 0.
b.Imposta il percorso della cartella del robot. Di solito si tratta della cartella principale che contiene i file .c5g, .CIO e .xml.
c.Imposta il percorso del file del robot. Si tratta del file .c5g contenuto nella cartella del robot.
d.Imposta il percorso del file DLL RRS, di solito rcscomau.dll.
2.Genera il programma RRS facendo clic con il pulsante destro del mouse sul suo programma➔ Genera programma RRS (Comau)
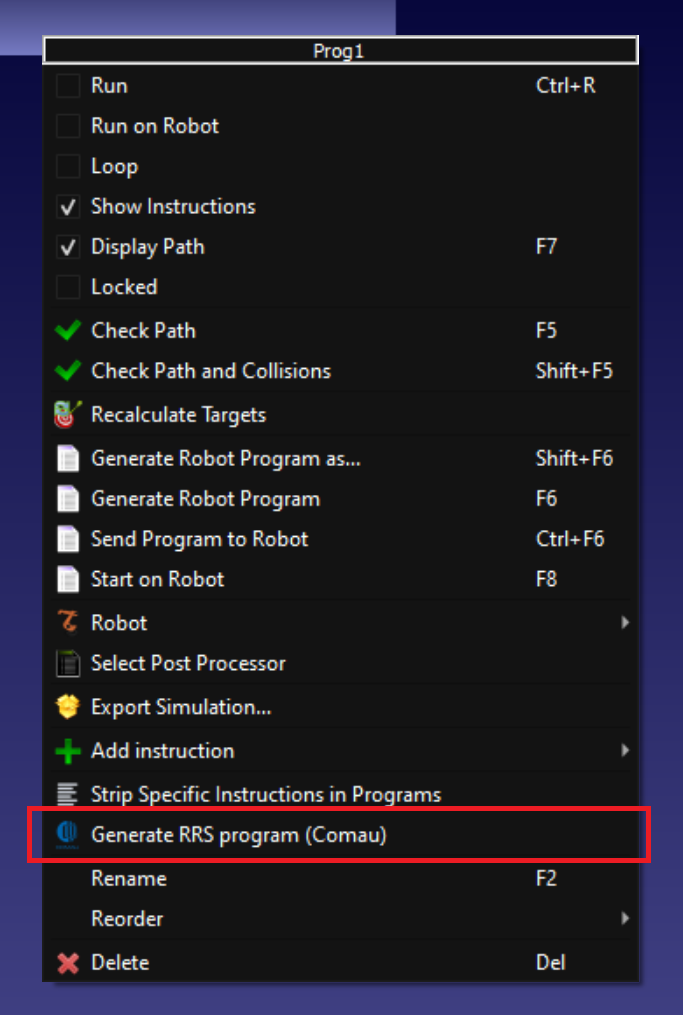
Verrà creato un nuovo programma con giunti accurati e la stima del tempo di ciclo verrà fornita nel nome del programma.