RoboDK API
C# (pronunciato "C sharp") è un linguaggio di programmazione sviluppato da Microsoft e progettato per creare una varietà di applicazioni basate su .NET Framework. C# è semplice, potente e object-oriented.
La sezione principale di questo documento spiega i vantaggi di utilizzare l'API di RoboDK con un linguaggio di programmazione come C#.
L'API di RoboDK per C# è un source file RoboDK.cs che contiene la classe RoboDK (simile alla classe Python Robolink), la classe RoboDK.Item (simile alla classe Python Robolink.Item) e altri strumenti per la robotica come la classe Matrici (RoboDK.Mat) per operazioni con matrici per operare sulla trasformazione di pose.
L'API di RoboDK per C# è fornita con un progetto semplice come mostrato nella seguente immagine (il codice sorgente completo è anch'esso incluso)

Seleziona Carica File per aprire la stazione RoboDK o qualunque altro file supportato da RoboDK. Se un robot è caricato, la variabile ROBOT sarà aggiornata.
Il seguente video mostra una panoramica del progetto C# utilizzando l'API RoboDK:
https://www.youtube.com/watch?v=1hRRYr9bEsY
Programmi in C# sono simulati di default quando comandi robot sono utilizzati (come MoveJ, MoveL o setDO).
Quando il programma C# è iniziato, la modalità simulazione è selezionata di default.

Ciò significa che i movimenti robot saranno simulati in RoboDK. Per esempio, possiamo muovere il robot con passi di 10 mm selezionanto di pulsanti sulla destra (+Tx, -Tx, ...) oppure possiamo selezionare Avvia Programma Test per avviare un movimento esagonale attorno alla posizione corrente del robot.
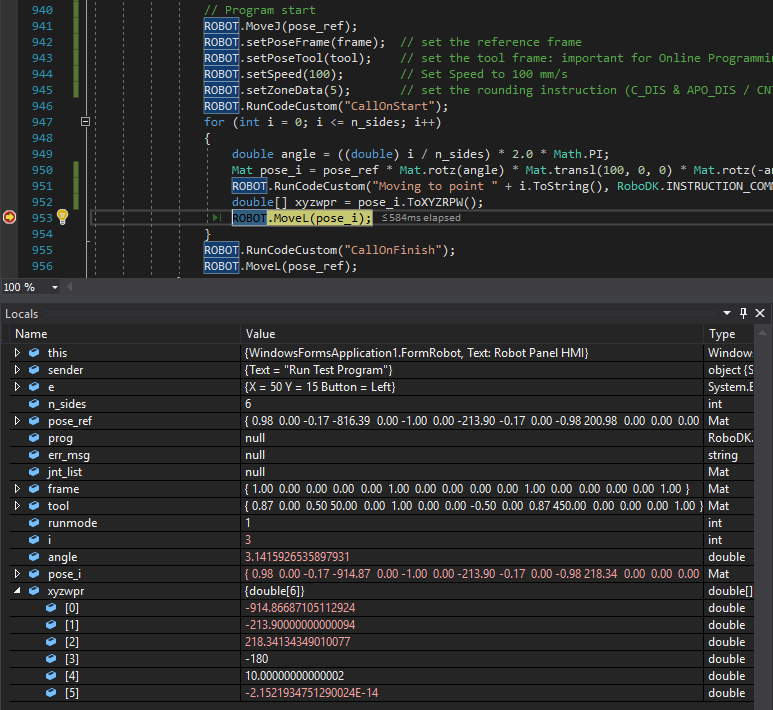
Impostare i breakpoints per fare il debug dell'applicazione e ispezionare i bersagli robot. Bersagli robot possono essere definiti come coordinate giunti o variabili Mat (pose 4x4) e possono essere ispezionati in formato XYZWPR per risolvere problemi. Più informazioni riguardo piani di riferimento nella sezione Piani di Riferimento.
È anche possibile modificare Run Mode in Programmazione Offline o Programmazione Online come mostrato nelle prossime sezioni
Programmi C# possono essere generati offline utilizzando lo stesso codice C# utilizzato per simulare il robot (programmazione offline) Segui questi passaggi per testare questa funzionalità:
1.Seleziona Offline Programming nella sezione Run Mode
2.Seleziona Run Test Program o qualunque altra combinazione di moviementi
3.Seleziona Generate Prog per ottenere un programma specifico per robot
In questo caso il programma non viene simulato ma eseguito velocemente per ottenere il risultato: un programma robot specifico per controllore robot. Il Run Mode cambierà di nuovo in Simulazione una volta che il programma è generato.

Programmi C# possono essere eseguiti direttamente sul robot utilizzando lo stesso codice della simulazione. Programmi online permettono di eseguire un programma generico su uno specifico controller robot utilizzando i Driver Robot. Segui questi passi per testare questa funzionalità utilizzando un programma esempio C#:
1.Seleziona Run on Robot nella sezione Run Mode
2.Seleziona qualunque altro comando che farà muovere il robot
I movimenti saranno eseguiti sul robot reale e il simulatore sincronizzerà i movimenti con il robot.

RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);