Navigation offcanvas
- Guida di Base
- Per iniziare
- Interfaccia
- Menu Opzioni
- Programmi Robot
- Fresatura Robot
- RoboDK CAM
- Consigli e trucchi
- Suggerimenti Generali
- Add-ins
- Add-in
- Componenti Add-In
- File Manager
- Palletizing
- Smart Motion
- Visione al computer
- Utilità curve
- Utilità per i punti
- Display Panel
- OPC-UA
- Registrazione
- Simulazione realistica di robot (RRS)
- Zone di sicurezza
- Generatore di modelli superficiali
- Augmented Reality
- Add-in per la saldatura
- RoboDK CNC
- Plugin di monitoraggio IO
- Add-in di esportazione Blender
- Add-in IsaacSim Bridge
- Game Controller
- Plugins for CAD/CAM
- Add-in RoboDK per il software CAD/CAM
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Plugin for FreeCAD
- Add-in RoboDK per Fusion 360
- RoboDK Plugin for hyperMILL
- Add-in RoboDK per Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- Add-in RoboDK per Onshape
- Add-in RoboDK per Rhino
- Add-in RoboDK per Siemens Solid Edge
- Add-in RoboDK per SolidWorks
- Rilevamento delle collisioni
- Examples
- Robot Tips
- Post Processori
- Realtà Virtuale
- RoboDK API
- Driver Robot
- Accuracy
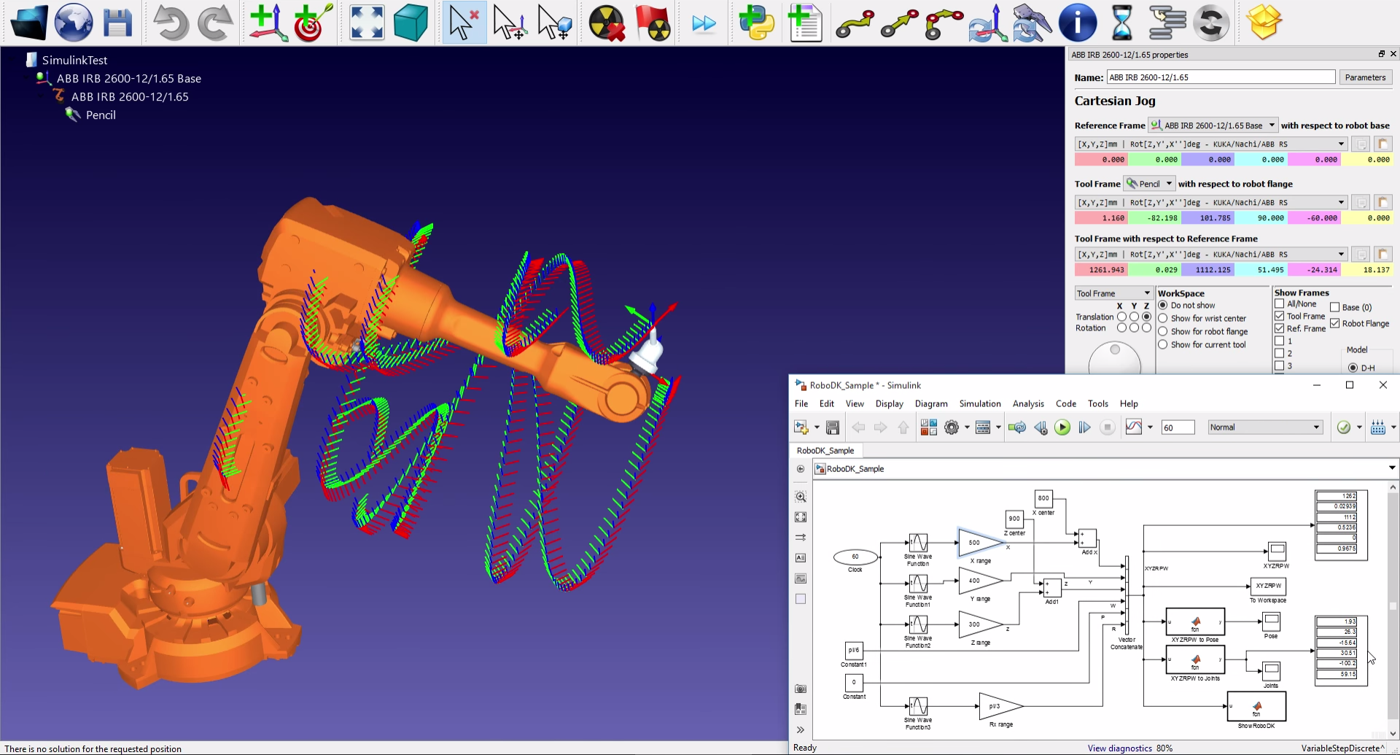
Un progetto Simulink è disponibile come un esempio. Nella simulazione, il robot è mosso attorno ad un insieme di coordinate XYZ generate arbitrariamente.
Il seguente video mostra il risultato della simulazione:
https://www.youtube.com/watch?v=7DDBMwa0-Oc