Matlab API
Matlab è un linguaggio di programmazione proprietario sviluppato da MathWorks. Tra le altre cose, MATLAB permette la manipolazione di matrici, stampare funzioni e dati ed implementare algoritmi.
La sezione principale di questo documento spiega i vantaggi di utilizzare l'API di RoboDK con il linguaggio di programmazione Matlab per la programmazione di robot.
L'API di RoboDK per Matlab è disponibile dopo che RoboDK è installato in C:/RoboDK/Matlab/. L'API è fornita come un set di files m, inclusi:
●Robolink.m è una classe che si interfaccia con RoboDK. Ogni oggetto nella stazione RoboDK può essere ottenuto utilizzando l'oggetto Robolink ed è rappresentato da un oggetto RobolinkItem (come la classe Python Robolink)
●RobolinkItem.m è una classe che rappresenta un oggetto RoboDK nella stazione. È possibile eseguire differenti operazioni su quell'oggetto (come la classe Python
●transl.m, rotx.m, roty.m and rotz.m sono funzioni che creano matrici di pose date una traslazione XYZ in vettori e rotazione attorno ad un asse specifico.
●Pose_2_XYZRPW.m e XYZRPW_2_Pose.m permettono di convertire pose in posizioni XYZ e angoli di Eulero RPW e viceversa. Più informazioni nella sezione Piani di Riferimento
Esempi sono disponibili nella seguente pagina:
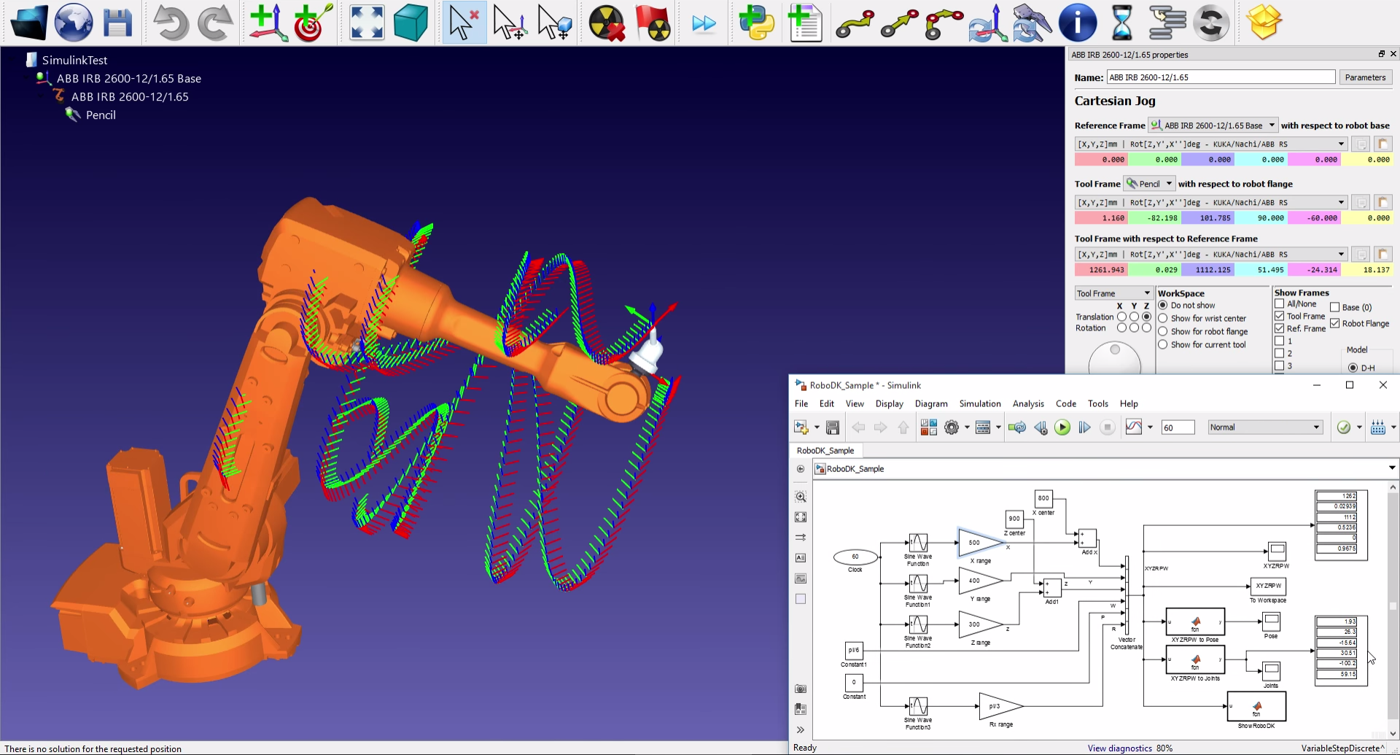
Esempio Simulink
Un progetto Simulink è disponibile come un esempio. Nella simulazione, il robot è mosso attorno ad un insieme di coordinate XYZ generate arbitrariamente.
Il seguente video mostra il risultato della simulazione:
https://www.youtube.com/watch?v=7DDBMwa0-Oc