Python API
Python è un linguaggio di programmazione di alto livello. Python è un linguaggio di programmazione che permette di lavorare velocemente ed integrare il tuo sistema in maniera efficente. La sintassi di Python permette ai programmatori di esprimere concetti in poche linee comparato agli altri linguaggi, renderndolo facile da imparare.
La sezione precedente spiega i vantaggi di utilizzare l'API di RoboDK con un linguaggio di programmazione vastamente utilizzato come Python.
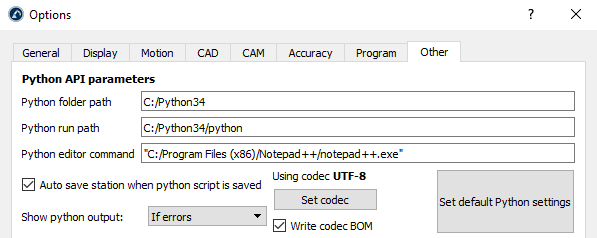
Python è automaticamente installato ed integrato in RoboDK di default. Selezionare Strumenti➔Opzioni➔Altro per modificare le impostazioni di default (percorso Python e editor Python)
L'API RoboDK è divisa in due moduli:
●Il modulo robolink (robolink.py): Il modulo robolink è l'interfaccia tra RoboDK e Python. Ogni oggetto nella stazione RoboDK può essere ottenuto utilizzando un oggetto Robolink ed è rappresentato da un oggetto Item. È possibile compiere operazioni differenti su quell'oggetto secondo la classe Robolink.Item
●Il modulo robodk (robodk.py): Il modulo robodk è un set di strumenti per robot per Python che permettono operazioni di trasformazione pose e ottenere angoli di Eulero da diversi produttori robot. Tutti i post processori dipendono da questo modulo robodk
I moduli Python sono localizzati nella cartella C:/RoboDK/Python/ e sono copiati nella cartella Python in automatico quando RoboDK è installato o quando Impostazioni Python di default è selezionata (immagine precedente)
La sottosezione successiva mostra come creare un semplice programma per simulazione, programmazione offline ed online. Altri esempi sono disponibili nella pagine Python API per RoboDK. Inoltre, la libreria RoboDK è provvista di alcune macro di esempio nella cartella C:/RoboDK/Library/Macros/
Simulazione Python
Segui questi passaggi per impostare un progetto esempio utilizzando un robot UR e simulare il movimento con il robot.
1.Seleziona File➔
2.Apri il robot UR10
3.Seleziona File➔
4.Apri il file Paint_gun.tool
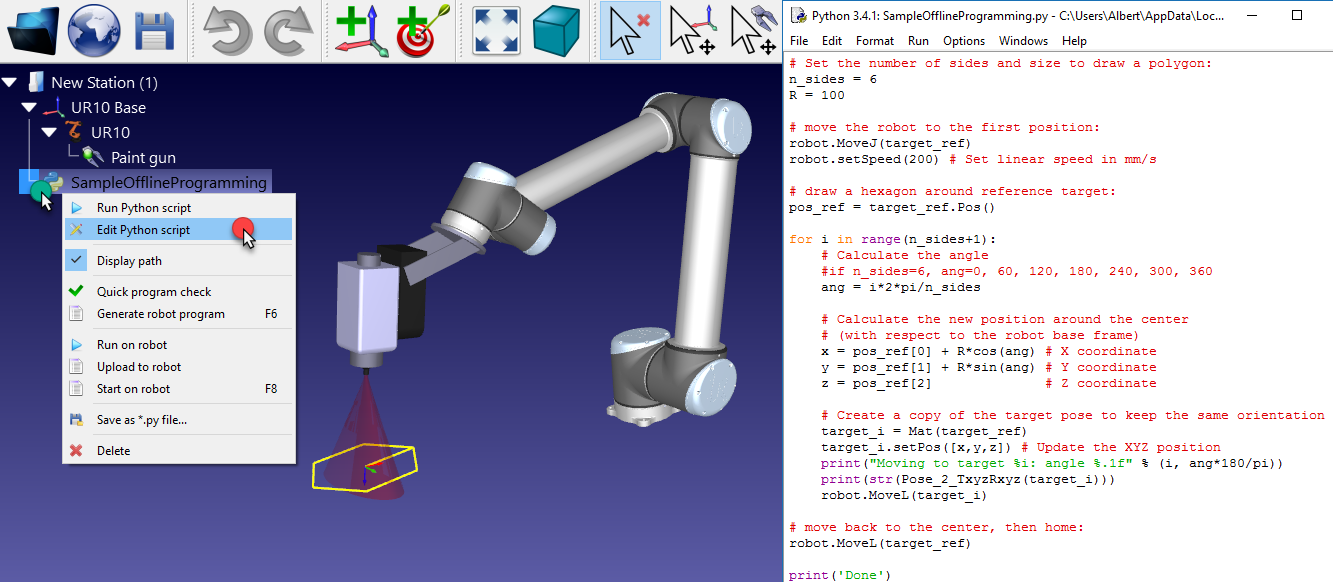
5.Apri il programma di esempio SampleOfflineProgramming.py da C:/RoboDK/Library/Macros/

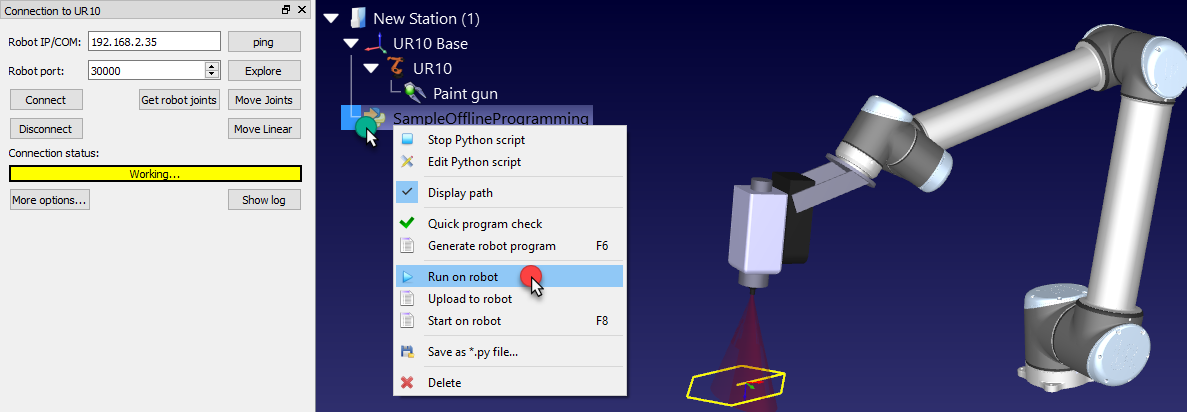
6.Fare doppio click su SampleOfflineProgramming per iniziare la simulazione. Il robot dovrebbe disegnare un esagono attorno alla posizione corrente del robot e una traccia del TCP sarà visualizzata in giallo.
In alternativa, clicca con il tasto destro sul programma e selezione 
7.Clicca con il tasto destro su 
La macro SampleOfflineProgramming disegnerà un poligono con n_sides lati e raggio R alla posizione corrente del robot, con rispetto del piano di riferimento del robot. Se si desidera muovere il robot in una posizione diversa, modificare le dimensioni del poligono e far ripartire il programma.
Questo esempio è simile al programma visualizzato nella sezione Programmazione Offline del sito (con video)
Python OLP
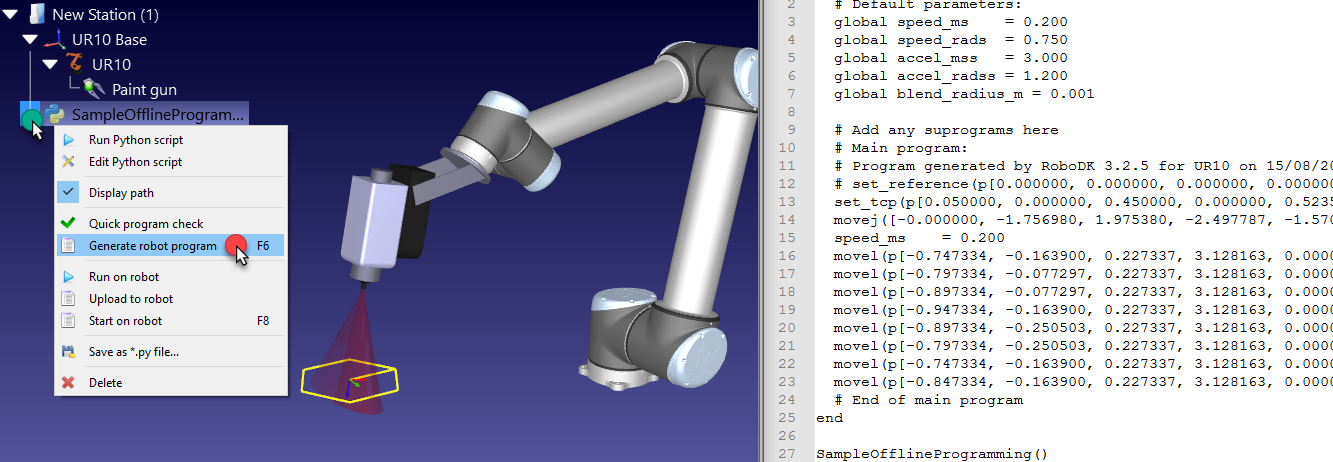
Programmi Python possono essere generati offline utilizzando lo stesso codice Python utilizzato per simulare il robot (come mostrato nella sezione precedente Simulazione Python). La programmazione Offline permette di generare programmi robot che possono essere eseguiti su uno specifico controller robot:
1.Clicca con il tasto destro su un
2.Selezione Genera programma robot (F6)
In questo caso il programma non è simulato ma eseguito velocemente per ottenere il risultato: un programma robot specifico per il controllore robot.
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
Programmazione Python Online
Programmi Python possono essere eseguiti direttamente sul robot utilizzando lo stesso codice Python utilizzato per simulare il robot (come mostrato nella sezione Simulazione Python). La Programmazione Online permette di avviare un generico programma sullo specifico controllore robot utilizzando i Driver Robot:
1.Tasto destro su
2.Selezione Avvia su robot
Il programma verrà avviato sul robot assieme all'esecuzione del programma Python.
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)
Risoluzione dei problemi di configurazione di Python in RoboDK
Se hai installato RoboDK dopo aver installato Python, RoboDK potrebbe non riuscire a eseguire correttamente gli script Python o a generare programmi. Questa sezione mostra i passaggi da seguire per configurare correttamente l'interprete Python in RoboDK ed eseguire script Python senza problemi.
Dovresti seguire questi passaggi se visualizzi un messaggio di errore come: "Imposta il percorso dell'interprete Python in Strumenti-Opzioni-Python" oppure "Impossibile eseguire lo script Python. Imposta il percorso dell'interprete Python nella scheda: Strumenti-Opzioni-Python".
Segui questi passaggi per configurare correttamente il percorso dell'interprete Python se hai già Python installato:
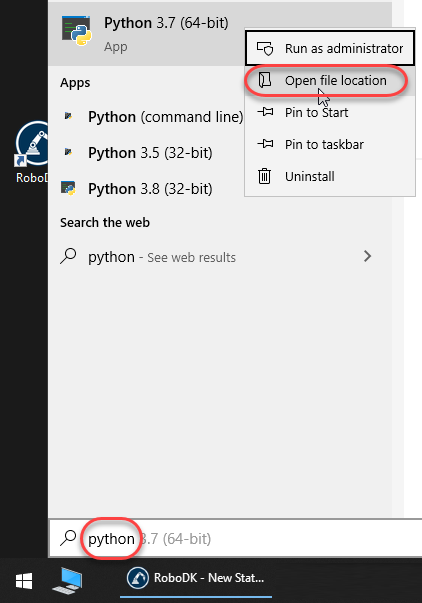
Seleziona il Menu Start su Windows e digita python.
Fai clic destro sulla versione di Python che desideri utilizzare con RoboDK e seleziona Apri percorso file.
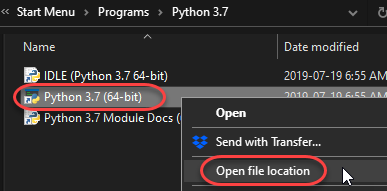
Ripeti questa procedura nella cartella che si apre:
Fai clic destro su Python 3.7 e seleziona Apri percorso file.
Seleziona Copia sul percorso nella barra del titolo del percorso.
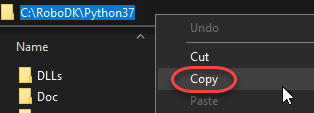
Fornisci il percorso Python nelle impostazioni di RoboDK:
Apri RoboDK.
Seleziona Strumenti-Opzioni.
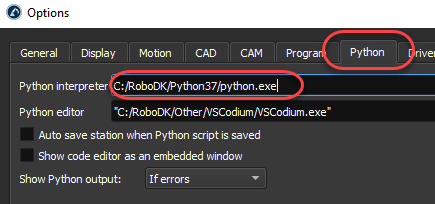
Seleziona la scheda Python.
Incolla il percorso nella casella dell'interprete Python aggiungendo /python.exe, come mostrato nell'immagine successiva. Utilizzare barre in avanti o barre rovesciate dovrebbe funzionare in entrambi i casi.