Simulazione Python
Segui questi passaggi per impostare un progetto esempio utilizzando un robot UR e simulare il movimento con il robot.
1.Seleziona File➔
2.Apri il robot UR10
3.Seleziona File➔
4.Apri il file Paint_gun.tool
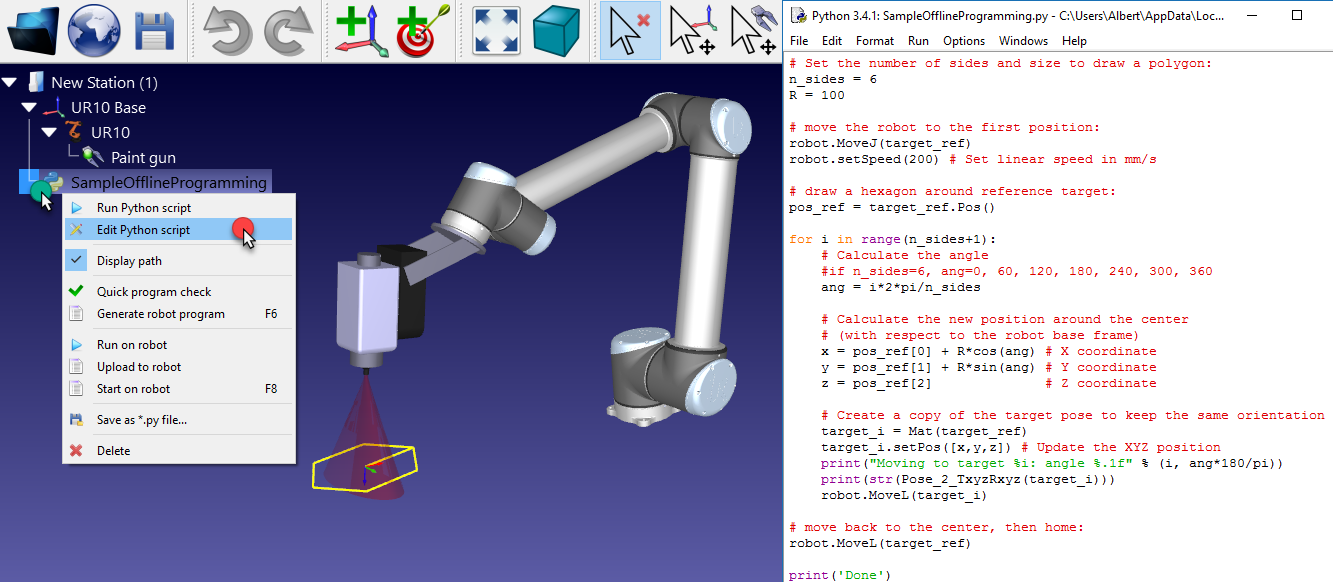
5.Apri il programma di esempio SampleOfflineProgramming.py da C:/RoboDK/Library/Macros/

6.Fare doppio click su SampleOfflineProgramming per iniziare la simulazione. Il robot dovrebbe disegnare un esagono attorno alla posizione corrente del robot e una traccia del TCP sarà visualizzata in giallo.
In alternativa, clicca con il tasto destro sul programma e selezione 
7.Clicca con il tasto destro su 
La macro SampleOfflineProgramming disegnerà un poligono con n_sides lati e raggio R alla posizione corrente del robot, con rispetto del piano di riferimento del robot. Se si desidera muovere il robot in una posizione diversa, modificare le dimensioni del poligono e far ripartire il programma.
Questo esempio è simile al programma visualizzato nella sezione Programmazione Offline del sito (con video)