RoboDK API
Programmi in C# sono simulati di default quando comandi robot sono utilizzati (come MoveJ, MoveL o setDO).
Quando il programma C# è iniziato, la modalità simulazione è selezionata di default.

Ciò significa che i movimenti robot saranno simulati in RoboDK. Per esempio, possiamo muovere il robot con passi di 10 mm selezionanto di pulsanti sulla destra (+Tx, -Tx, ...) oppure possiamo selezionare Avvia Programma Test per avviare un movimento esagonale attorno alla posizione corrente del robot.
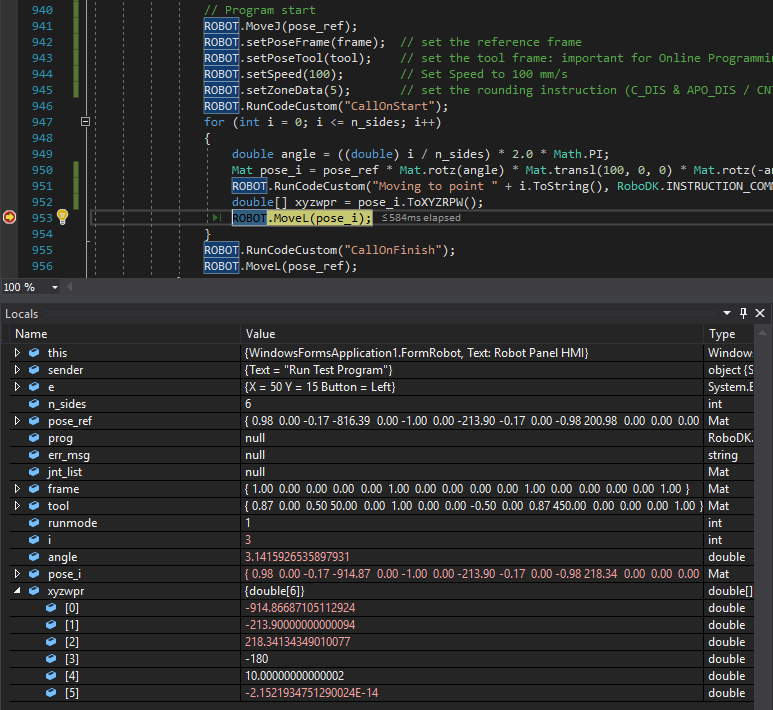
Impostare i breakpoints per fare il debug dell'applicazione e ispezionare i bersagli robot. Bersagli robot possono essere definiti come coordinate giunti o variabili Mat (pose 4x4) e possono essere ispezionati in formato XYZWPR per risolvere problemi. Più informazioni riguardo piani di riferimento nella sezione Piani di Riferimento.
È anche possibile modificare Run Mode in Programmazione Offline o Programmazione Online come mostrato nelle prossime sezioni