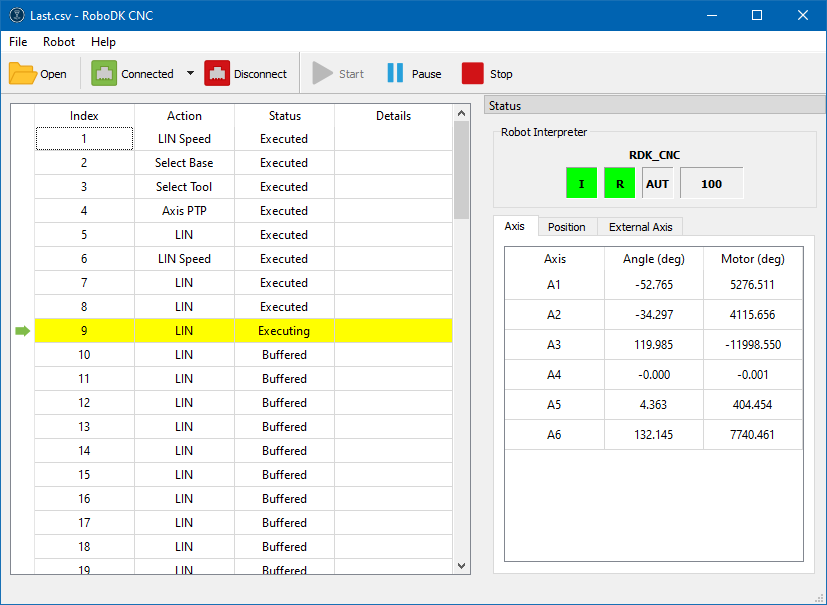
Interfaccia utente di RoboDK CNC
RoboDK CNC consente di inviare programmi di grandi dimensioni a un controllore di robot.
La finestra principale di RoboDK CNC contiene i seguenti elementi:
1.Menu principale
2.Barra degli strumenti
3.Tabella delle istruzioni
4.Pannello di stato
Le operazioni del Menu principale e della Barra degli strumenti si sovrappongono.
| Aperto | Apra un file CSV generato con e il post processor RoboDK CNC . |
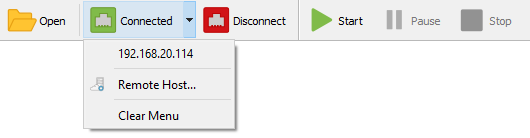
| Collegare | Questa icona indica che al momento non c'è alcuna connessione al sistema di controllo del robot. Premendo questo pulsante, si aprirà il menu della cronologia delle connessioni. |
| Host remoto... | Quest'azione farà apparire la finestra di dialogo Nuova connessione per connettersi all'indirizzo IP e alla porta del sistema di controllo remoto del robot. |
| Collegamento | Questa icona indica un tentativo di connessione al sistema di controllo del robot. |
| Collegato | Questa icona indica una connessione riuscita al sistema di controllo del robot. |
| Disconnettersi | Questa azione interrompe immediatamente la connessione al sistema di controllo del robot. Faccia attenzione, il robot potrebbe continuare a muoversi anche dopo la disconnessione del CNC RoboDK. |
| Inizio | Iniziare a eseguire i movimenti del robot con la prima istruzione. Oppure continuare a eseguire un programma avviato in precedenza. |
| Pausa | Sospende l'esecuzione di un programma avviato in precedenza. |
| Stop | Annulla l'esecuzione del programma e arresta i movimenti del robot. |









Il Pannello di stato contiene informazioni sul programma KRL in corso, indicatori di prontezza e di esclusione della velocità e informazioni sulla posizione attuale del robot.
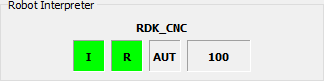
Il pannello Robot Interpreter contiene quattro indicatori:
Azionamenti e movimento dei robot |
| Gli azionamenti del robot sono accesi e il robot è pronto a compiere movimenti. |
| Gli attuatori del robot sono spenti e il robot non è pronto per il funzionamento. | |
Stato del programma KRL |
| Il programma del robot non viene caricato. |
| Il programma del robot è caricato e pronto per l'esecuzione. | |
| Il programma del robot viene eseguito. | |
| Il programma del robot è stato interrotto a causa di un errore. | |
| Il programma del robot è stato eseguito completamente. | |
Modalità controllore robot |
| La modalità operativa attuale del sistema di controllo del robot. Può assumere i seguenti valori: T1, T2, AUT, EXT. |
Annullamento della velocità |
| Il valore di esclusione della velocità di esecuzione del programma, in percentuale, da 0 a 100. |








