RoboDK CNC
RoboDK CNC è una raccolta di strumenti che facilitano l'utilizzo dei robot come una CNC. RoboDK CNC consente l'esecuzione di programmi di grandi dimensioni fino a un numero illimitato di linee in modalità streaming. I programmi di grandi dimensioni sono solitamente il risultato dell'utilizzo di sistemi CAD/CAM e dell'impiego di robot per la lavorazione.
La maggior parte dei sistemi di controllo dei robot dispone di risorse molto limitate e non è in grado di caricare in memoria programmi di grandi dimensioni. RoboDK CNC elimina queste limitazioni inviando le coordinate una per una o in gruppi di sottoprogrammi al sistema di controllo (noto anche come dripfeeding).
RoboDK offre un add-in dedicato (RoboDK CNC) che consente di eseguire progetti di fresatura robotizzata di grandi dimensioni sui controller robot KUKA. RoboDK offre anche post-processor dedicati per alcuni controllori per implementare questa strategia.
Installi il componente aggiuntivo RoboDK CNC
Se ha già RoboDK con il plugin Add-in Manager installato, l'unica azione da fare è installare il componente aggiuntivo dalla Libreria online di RoboDK.
Il server di interfaccia Bridge C3 deve essere installato nel sistema di controllo del robot. Per maggiori informazioni al riguardo, veda il driver RoboDK per KUKA.
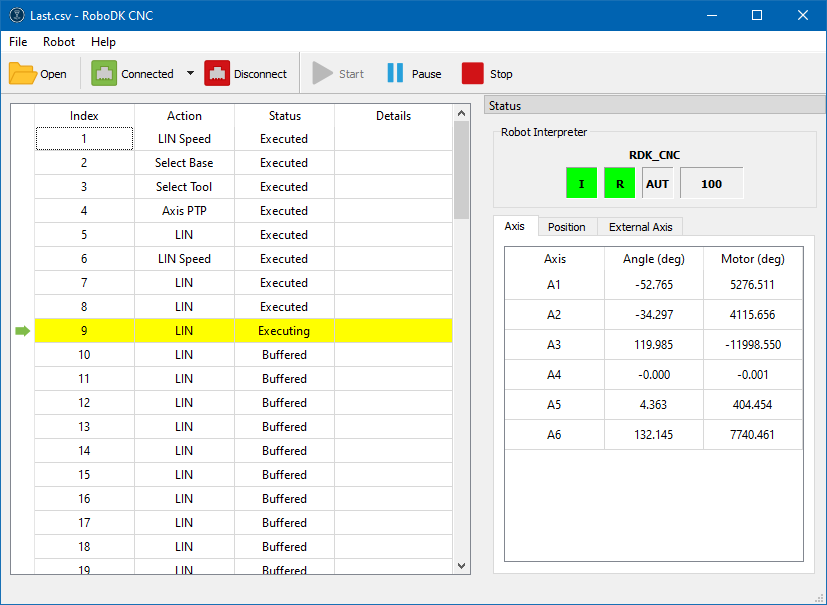
Interfaccia utente di RoboDK CNC
RoboDK CNC consente di inviare programmi di grandi dimensioni a un controllore di robot.
La finestra principale di RoboDK CNC contiene i seguenti elementi:
1.Menu principale
2.Barra degli strumenti
3.Tabella delle istruzioni
4.Pannello di stato
Le operazioni del Menu principale e della Barra degli strumenti si sovrappongono.
| Aperto | Apra un file CSV generato con e il post processor RoboDK CNC . |
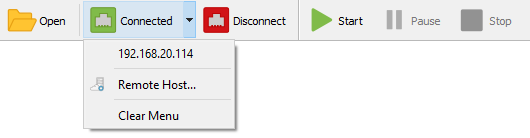
| Collegare | Questa icona indica che al momento non c'è alcuna connessione al sistema di controllo del robot. Premendo questo pulsante, si aprirà il menu della cronologia delle connessioni. |
| Host remoto... | Quest'azione farà apparire la finestra di dialogo Nuova connessione per connettersi all'indirizzo IP e alla porta del sistema di controllo remoto del robot. |
| Collegamento | Questa icona indica un tentativo di connessione al sistema di controllo del robot. |
| Collegato | Questa icona indica una connessione riuscita al sistema di controllo del robot. |
| Disconnettersi | Questa azione interrompe immediatamente la connessione al sistema di controllo del robot. Faccia attenzione, il robot potrebbe continuare a muoversi anche dopo la disconnessione del CNC RoboDK. |
| Inizio | Iniziare a eseguire i movimenti del robot con la prima istruzione. Oppure continuare a eseguire un programma avviato in precedenza. |
| Pausa | Sospende l'esecuzione di un programma avviato in precedenza. |
| Stop | Annulla l'esecuzione del programma e arresta i movimenti del robot. |









Il Pannello di stato contiene informazioni sul programma KRL in corso, indicatori di prontezza e di esclusione della velocità e informazioni sulla posizione attuale del robot.
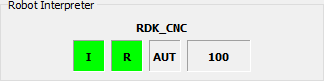
Il pannello Robot Interpreter contiene quattro indicatori:
Azionamenti e movimento dei robot |
| Gli azionamenti del robot sono accesi e il robot è pronto a compiere movimenti. |
| Gli attuatori del robot sono spenti e il robot non è pronto per il funzionamento. | |
Stato del programma KRL |
| Il programma del robot non viene caricato. |
| Il programma del robot è caricato e pronto per l'esecuzione. | |
| Il programma del robot viene eseguito. | |
| Il programma del robot è stato interrotto a causa di un errore. | |
| Il programma del robot è stato eseguito completamente. | |
Modalità controllore robot |
| La modalità operativa attuale del sistema di controllo del robot. Può assumere i seguenti valori: T1, T2, AUT, EXT. |
Annullamento della velocità |
| Il valore di esclusione della velocità di esecuzione del programma, in percentuale, da 0 a 100. |









Esempio di flusso di lavoro
Questa sezione descrive i passaggi per utilizzare il RoboDK CNC per eseguire un programma su un controllore KUKA.
1.Avvii l'applicazione RoboDK CNC: con il plugin abilitato, selezioni Utilità➔ RoboDK CNC.
2.Si colleghi al sistema di controllo remoto del robot con il Server di Interfaccia Bridge C3 in funzione.
3.Se esegue l'applicazione per la prima volta o se il suo sistema di controllo robot non ha mai utilizzato RoboDK CNC, prima di iniziare è necessaria una configurazione automatica. La esegua utilizzando il menu Robot➔ Configura...
4.Apra un file di programma CSV generato con il post processor RoboDK CNC.
5.Si assicuri che il robot sia pronto per il funzionamento: i motori sono accesi, la modalità di funzionamento desiderata e le impostazioni di velocità sono impostate.
6.Premere il pulsante Avvio per avviare l'esecuzione del programma.